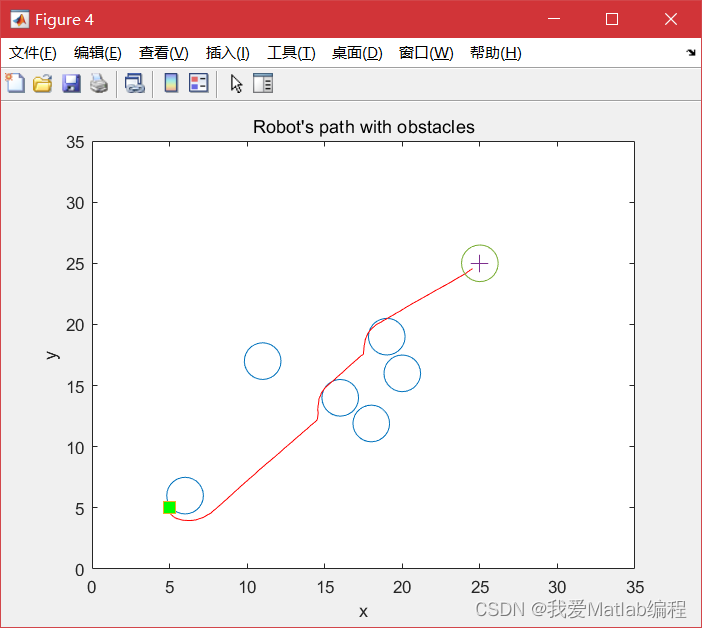
网上代码很多,这个可以直接使用。
Xo=[0 0];%起点位置
k=50;%计算引力需要的增益系数
K=0;%初始化
m=15;%计算斥力的增益系数,都是自己设定的。
Po=0.5;%障碍影响距离,当障碍和车的距离大于这个距离时,斥力为0,即不受该障碍的影响。也是自己设定。
n=6;%障碍个数
a=0.5;
l=0.2;%步长
J=200;%循环迭代次数
Xsum=[6 10;1 1.2;3 2.5;4 4.5;3 6;6 2;5.5 5.5;];%这个向量是(n+1)*2维,其中[10 10]是目标位置,剩下的都是障碍的位置。也可以用XGOAL重新另写一行
Xj=Xo;%j=1循环初始,将车的起始坐标赋给Xj
%***************初始化结束,开始主体循环******************
for j=1:J%循环开始Goal(j,1)=Xj(1);%Goal是保存车走过的每个点的坐标。刚开始先将起点放进该向量。Goal(j,2)=Xj(2);
%调用计算角度模块Theta=compute_angle(Xj,Xsum,n);%Theta是计算出来的车和障碍,和目标之间的与X轴之间的夹角,统一规定角度为逆时针方向,网上可以查具体函数Angle=Theta(1);%Theta(1)是车和目标之间的角度,目标对车是引力。angle_at=Theta(1);%为了后续计算斥力在引力方向的分量赋值给angle_at[Fatx,Faty]=compute_Attract(Xj,Xsum,k,Angle,0,Po,n);%计算出目标对车的引力在x,y方向的两个分量值。for i=1:nangle_re(i)=Theta(i+1);%计算斥力用的角度,是个向量,因为有n个障碍,就有n个角度。end
%调用计算斥力模块
[Frerxx,Freryy,Fataxx,Fatayy]=compute_repulsion(Xj,Xsum,m,angle_at,angle_re,n,Po,a);%计算出斥力在x,y方向的分量数组。
%计算出X,Y方向向量Fsumyj=Faty+Freryy+Fatayy;%y方向的合力Fsumxj=Fatx+Frerxx+Fataxx;%x方向的合力Position_angle(j)=atan(Fsumyj/Fsumxj);%合力与x轴方向的夹角向量
%计算车的下一步位置Xnext(1)=Xj(1)+l*cos(Position_angle(j));Xnext(2)=Xj(2)+l*sin(Position_angle(j));%保存车的每一个位置在向量中Xj=Xnext;%判断if ((Xj(1)-Xsum(1,1))>0)&&((Xj(2)-Xsum(1,2))>0)%这个地方可以修改一下,改成相等会避免超出目标点而继续迭代下去K=j;%记录迭代到多少次,到达目标。break;%记录此时的j值end%如果不符合if的条件,重新返回循环,继续执行。
end%大循环结束
K=j;
Goal(K,1)=Xsum(1,1);%把路径向量的最后一个点赋值为目标
Goal(K,2)=Xsum(1,2);
X=Goal(:,1);
Y=Goal(:,2);
x=[1 3 4 3 6 5.5 ];%障碍的x坐标
y=[1.2 2.5 4.5 6 2 5.5 ];
figure(1);
axis([0 10 0 10]);
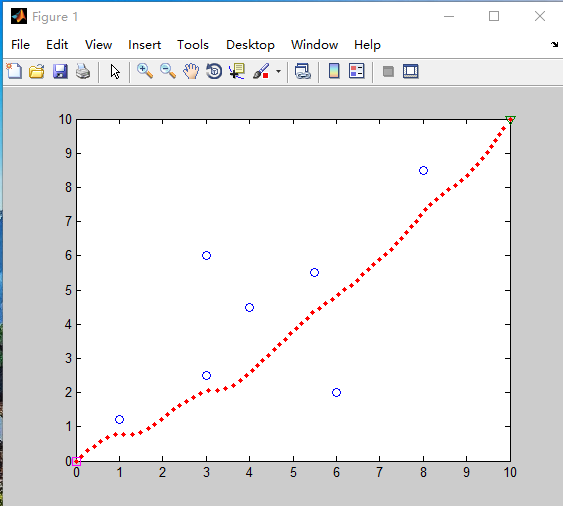
plot(x,y,'ok',6,10,'vr',0,0,'ms');
hold on
for i=1:Kpause(0.1);plot(X(i),Y(i),'.r');
end
% 添加坐标说明
xlabel('x轴坐标');
ylabel('y轴坐标');
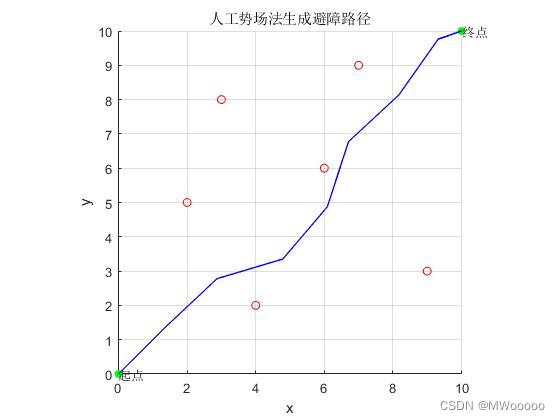
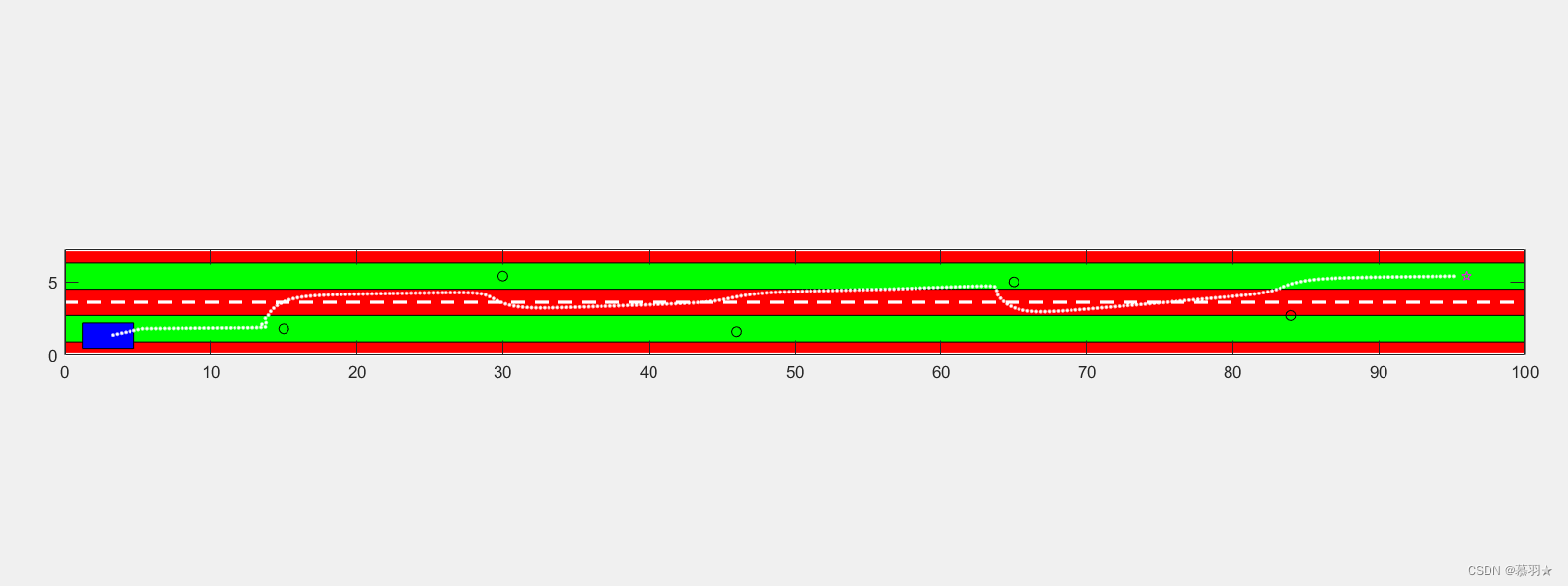
title('人工势场法路径规划');
box off
grid on
function Y=compute_angle(X,Xsum,n)%角度向量计算for i=1:n+1%n是障碍数目deltaX(i)=Xsum(i,1)-X(1);deltaY(i)=Xsum(i,2)-X(2);r(i)=sqrt(deltaX(i)^2+deltaY(i)^2);if deltaX(i)>0theta=acos(deltaX(i)/r(i));elsetheta=pi-acos(deltaX(i)/r(i));endif i==1%表示是目标angle=theta;elseangle=theta;end Y(i)=angle;%保存每个角度在Y向量里面,第一个元素是与目标的角度,后面都是与障碍的角度end
end
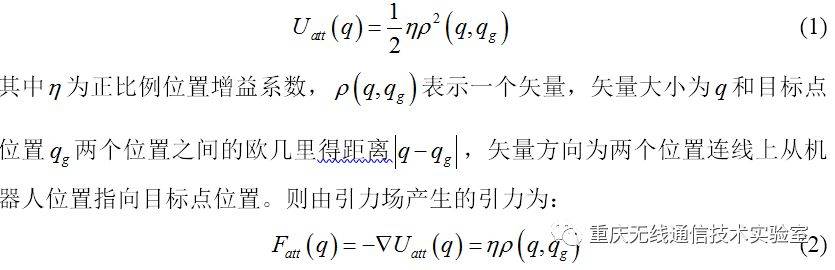
function [Yatx,Yaty]=compute_Attract(X,Xsum,k,angle,~,~,~)%输入参数为当前坐标,目标坐标,增益常数,分量和力的角度
%把路径上的临时点作为每个时刻的Xgoal
R=(X(1)-Xsum(1,1))^2+(X(2)-Xsum(1,2))^2;%路径点和目标的距离平方
r=sqrt(R);%路径点和目标的距离
Yatx=k*r*cos(angle);%angle=Y(1) 目标对车的X,Y方向的引力=引力系数*路径点和目标的距离*X/Y分量
Yaty=k*r*sin(angle);end
%斥力计算
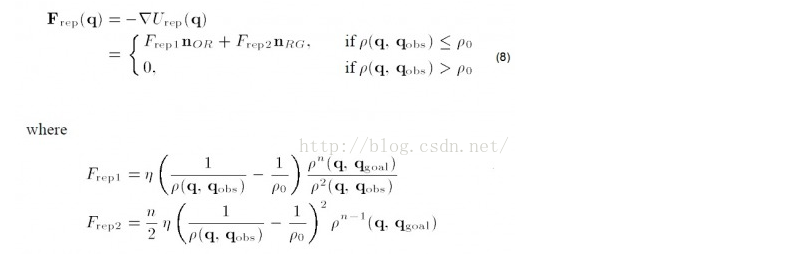
function [Yrerxx,Yreryy,Yataxx,Yatayy]=compute_repulsion(X,Xsum,m,angle_at,angle_re,n,Po,a)%输入参数为当前坐标,Xsum是目标和障碍的坐标向量,增益常数,障碍,目标方向的角度
Rat=(X(1)-Xsum(1,1))^2+(X(2)-Xsum(1,2))^2;%路径点和目标的距离平方
rat=sqrt(Rat);%路径点和目标的距离
for i=1:nRrei(i)=(X(1)-Xsum(i+1,1))^2+(X(2)-Xsum(i+1,2))^2;%路径点和障碍的距离平方rre(i)=sqrt(Rrei(i));%路径点和障碍的距离保存在数组rrei中R0=(Xsum(1,1)-Xsum(i+1,1))^2+(Xsum(1,2)-Xsum(i+1,2))^2;r0=sqrt(R0);if rre(i)>Po%如果每个障碍和路径的距离大于障碍影响距离,斥力令为0Yrerx(i)=0;Yrery(i)=0;Yatax(i)=0;Yatay(i)=0;else%if r0<Poif rre(i)<Po/2Yrer(i)=m*(1/rre(i)-1/Po)*(1/Rrei(i))*(rat^a);%分解的Fre1向量Yata(i)=a*m*((1/rre(i)-1/Po)^2)*(rat^(1-a))/2;%分解的Fre2向量Yrerx(i)=(1+0.1)*Yrer(i)*cos(angle_re(i));%angle_re(i)=Y(i+1)Yrery(i)=-(1-0.1)*Yrer(i)*sin(angle_re(i));Yatax(i)=Yata(i)*cos(angle_at);%angle_at=Y(1)Yatay(i)=Yata(i)*sin(angle_at);elseYrer(i)=m*(1/rre(i)-1/Po)*1/Rrei(i)*Rat;%分解的Fre1向量Yata(i)=m*((1/rre(i)-1/Po)^2)*rat;%分解的Fre2向量Yrerx(i)=Yrer(i)*cos(angle_re(i));%angle_re(i)=Y(i+1)Yrery(i)=Yrer(i)*sin(angle_re(i));Yatax(i)=Yata(i)*cos(angle_at);%angle_at=Y(1)Yatay(i)=Yata(i)*sin(angle_at);endend%判断距离是否在障碍影响范围内
endYrerxx=sum(Yrerx);%叠加斥力的分量Yreryy=sum(Yrery);Yataxx=sum(Yatax);Yatayy=sum(Yatay);
end
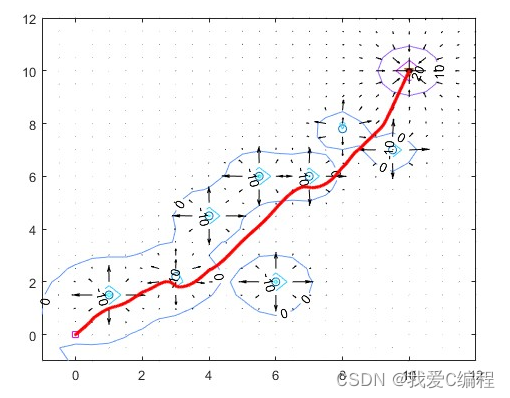
总的来说就是先找出运动点,障碍点和目标点三者之间的关系,进而算出三者之间的X,Y方向的向量和,找出运动点下一位置,达成循环。运动点每一次运动都执行上述循环,直到运动到目标点。这个算法只能算简单的了解一下,早已经不能满足现在的需求