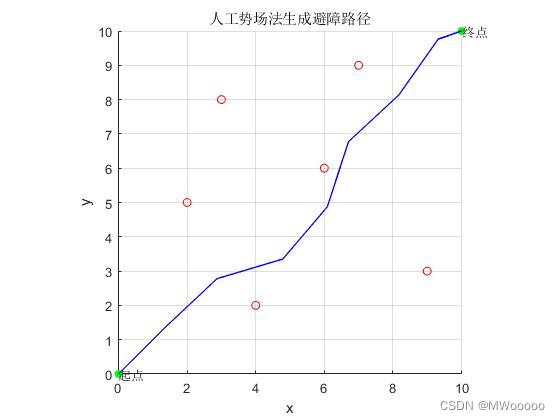
人工势场法是由Khatib于1986年提出,其方法是将移动机器人所处的环境用势场来定义,通过位置信息来控制机器人的避障行驶,基本思想是构造目标位姿引力场和障碍物周围斥力场共同作用的人工势场,搜索势函数的下降方向来寻找无碰撞路径。人工势场法避障技术使得机器人的移动能很好的适应机器人周围环境的变化,实时性高。
1 人工势场法的原理
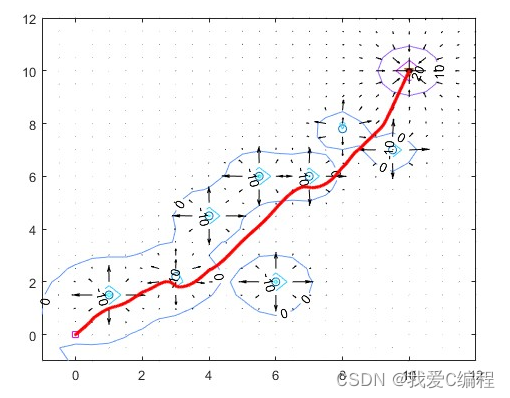
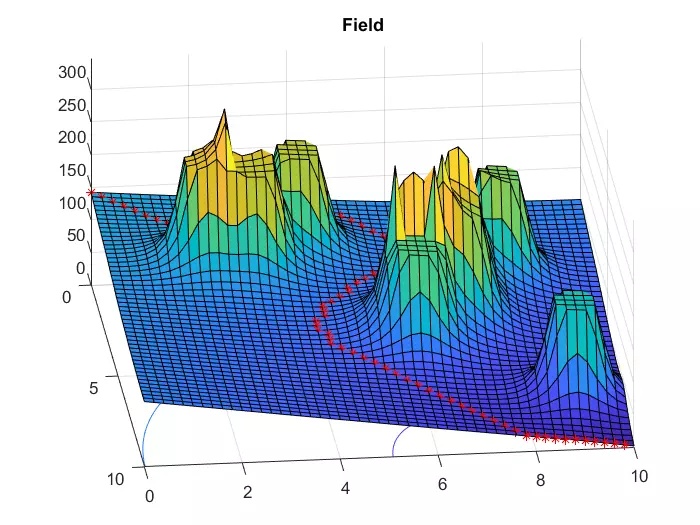
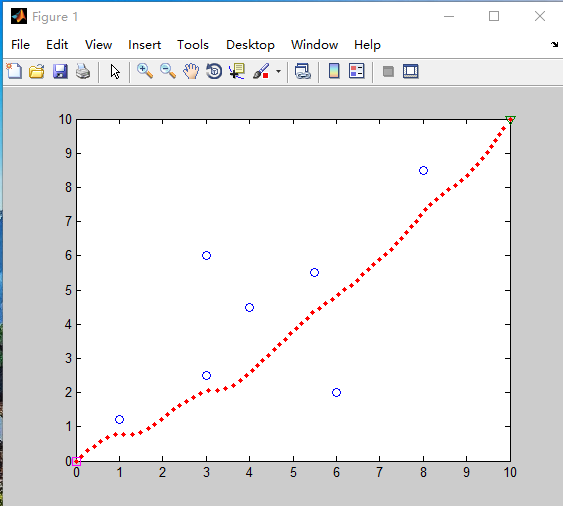
人工势场法原理是:首先构建一个人工虚拟势场,该势场由两部分组成,一部分是目标点对移动机器人产生的引力场,方向由机器人指向目标点,另一部分是障碍物对移动机器人产生的斥力场,方向为由障碍物指向机器人。运行空间的总势场为斥力场和引力场共同叠加作用,从而通过引力和斥力的合力来控制移动机器人的移动。
2引力函数
引力函数受移动机器人与目标点的距离影响,当目标点与移动机器人的距离越远时,其所受的势能越大;当目标点与机器人的距离越近时,其所受的势能越小。当机器人势能为零时,则表明机器人到达目标点位置,引力势函数表示为:
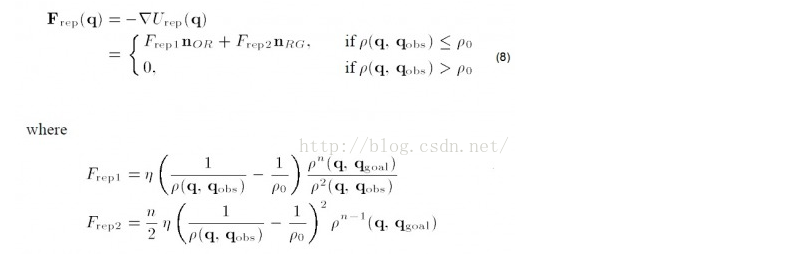
3 斥力函数
斥力函数受移动机器人与障碍物的距离影响,当障碍物与移动