-
- 是什么 Pixhawk简单介绍
- 直接使用
- 二次开发
- Pixhawk总体概述
- 怎么用 Pixhawk初次使用
- 搭建调试环境
- 初始化配置
- 测试试飞
- 调整参数提高性能
- 是什么 Pixhawk简单介绍
(是什么) Pixhawk简单介绍

PixHawk是著名飞控厂商3DR推出的新一代独立、开源、高效的飞行控制器,前身为APM飞控,不仅提供了丰富的外设模块和可靠的飞行体验,有能力的爱好者还可在其基础上进行二次开发
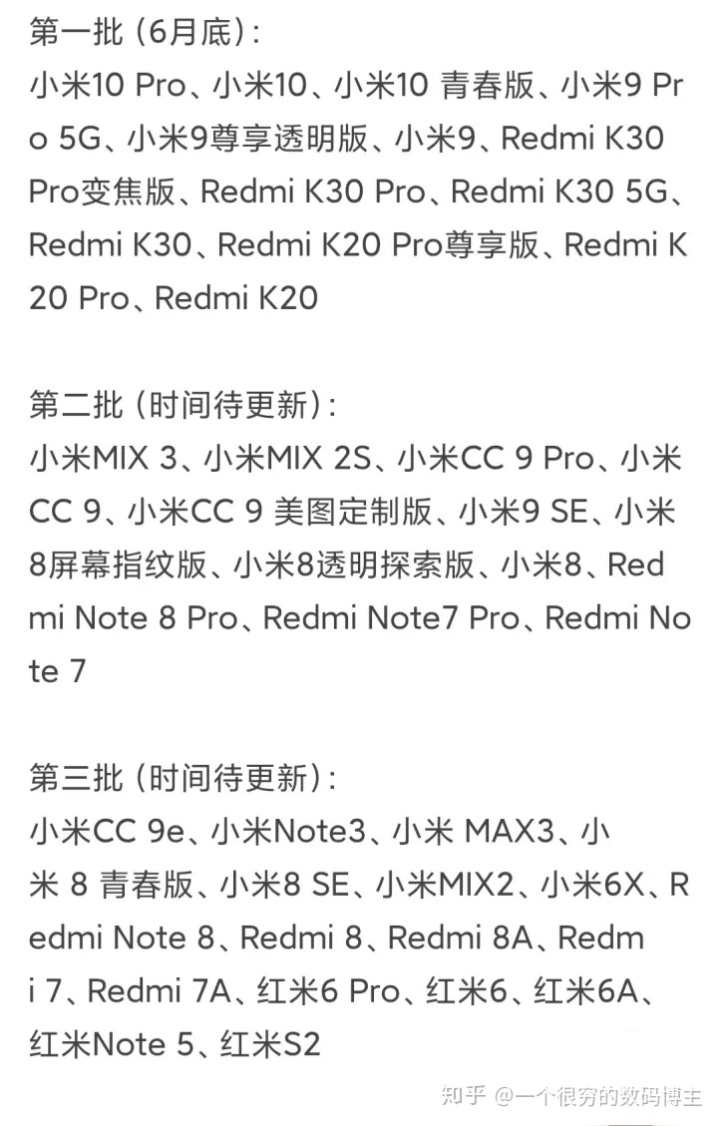
3DR 推出的Pixhawk的系列的多种飞控
直接使用
Pixhawk作为一个非常稳定的自动驾驶仪,可以作为固定翼、多旋翼、直升机、船舶、汽车模型的主控,通过连接外部的电机驱动,和无线遥控的接收机,实现多种模型的无线遥控驾驶。
二次开发
同时Pixhawk作为非常优秀的开源飞控,又给我们留了很多接口,用于二次开发。Pixhawk提供开源代码,我们可以直接基于代码进行二次开发;或者仅把Pixhawk作为无人驾驶仪的控制器,通过MAVLink协议与Pixhawk通信,进行二次开发
(二次开发结合后面的二次开发来讲)
Pixhawk总体概述
硬件配置
- 主处理器:32位STM32F427,主频168 MHz ,256 KB RAM,2 MB Flash
- 备用处理器:独立供电32位STM32F103故障保护协处理器
- 传感器:双 3轴加速度计(据说可确保绝大部分情况下可剔除单加速度计可能产生的混淆噪声,极大改善飞行稳定性)、磁力计(确认外部影响和罗盘指向)、双陀螺仪(测量旋转速度)、气压计(测高)、内置罗盘、支持外置双GPS
集成的备份、超控、故障保险处理器 - microSD 插槽用于日志等用途,
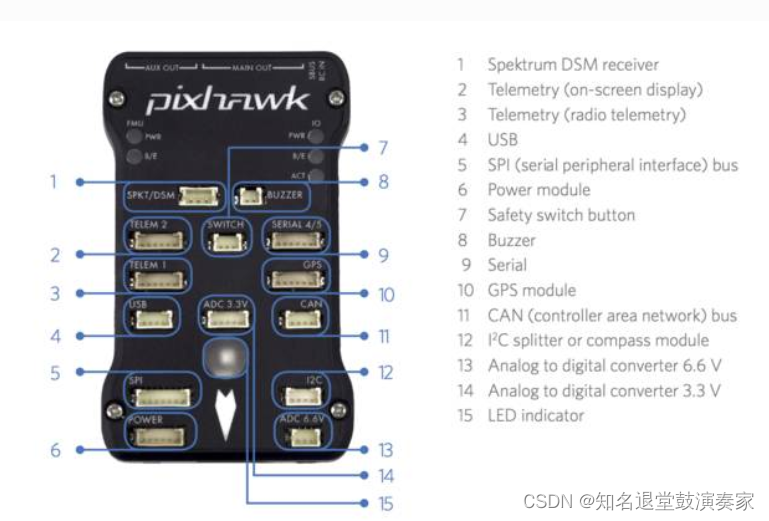
- 5个 UARTs, CAN, I2C, SPI, ADC,等
接口描述



(怎么用) Pixhawk初次使用
搭建调试环境
组装飞机
烧写固件
初始化配置
PixHawk飞控和Mission Planner地面站安装调试
初始化配置
(初始化配置,应该单独另出一节,讲四轴搭建)
测试、试飞
飞鱼飞控地面站(Android & IOS)
调整参数,提高性能
PID参数整定
P(比例):【回复力】是一个增益因子,修正偏差力度的一个比例值
当多旋翼受风等其他外界因素影响向一边倾斜时,P值直接决定了多旋翼抵抗这种倾斜力的大小。较高的P值会产生较强的修正力去抵抗飞行器位置的偏移
增大P值,飞行器会逐渐变得稳定,但P值太高会造成振荡和失控
P越大,多轴飞行器抵抗意外倾斜的能力越强,
如果P值太高,在飞行器返回初始位置的过程中会过冲然后再次往反方向修正,接着再次进行回到初始位置的补偿。这会 导致飞行器出现持续振荡,严重的话会完全破坏平衡。
但P过于大时会引起多轴飞行器抖动甚至猛烈侧翻 高频抖动
P越小,多轴飞行器抵抗意外倾斜的能力越弱,
但P过小时会引起多轴飞行器自平衡能力不足甚至朝一边侧翻(如顺着风的方向) 荡秋千式的慢慢晃动
P的理想值 是推油门悬停比较稳定
特技飞行:需要的P值稍高。
普通飞行:需要的P值稍低。
I(积分):这个参数决定了飞行控制器对过往飞行状态的依赖程度。(反应速度)
增大I值: 减小漂移和提升稳定效果,但过大的I值会延长稳定过程的周期,同时也会降低P的效果。
减小I值: 增强反应速度,但会增加漂移和降低稳定效果,同时会提升P的效果。
如果I值太小,会使飞行器过度依赖当前的误差,不能抑制“过敏”现象,从而造成飞行颠簸;如果I值太大,则会过度削弱系统对误差的反应能力,造成反应迟缓。
特技飞行:需要的I值稍低。
普通飞行:需要的I值稍高。
D(微分):【打舵后刹车】 【阻尼器】
较高的D值(数值与效果相反,较高的D值参数上会更接近0)意味着飞行器会快速返到回初始位置
增大D值:(请记住,增大效果等于减小设定的参数值) 提升修正的速度,也会提升产生修正过量与振荡的几率,同时也会提升P的效果。
减小D值:(请记住,减小效果等于增大设定的参数值) 降低由偏差状态返回初始位置的振荡,恢复到稳定效果的时间变长,同时也会降低P的效果。
特技飞行:增大D值(请注意是减小参数值)。
普通飞行:减小的D值(请注意是增大参数值)。
一旦多轴飞行器发生倾斜,则认为多轴飞行器会继续向同一方向倾斜,合适的D参数的能有效抑制未来可能发生的倾斜。
如果D值太小,您会觉得多轴飞行器反应不够灵敏;(打完舵后,松手,慢慢才回中)
如果D值太大,也会引起“过敏”。相较于P而言,D反映 得更多的是灵敏度,而P反映的是纠正误差的力度。(打完舵后,松手,回中有点抖)
D的理想值 (打完舵后,松手,迅速回中)
当多轴飞行器在PITCH/ROLL/YAW轴上有任意角度变化时,
1 外界环境(如风)导致变化,但是期望值没有变
2 用遥控打舵来改变,遥控给的就是期望
陀螺仪输出的实时值会与期望值比较,求出偏差角度值。再使用“PID”程序算法驱动电机,不断地纠正这个误差,让多轴飞行器回到期望的姿态。
首先调节P
用手抓着飞行器(小心),或者记在杆上固定好一个轴向
调(roll_P)增大油门,直到接近起飞的位置,左右晃动飞行器,增大P值,直到出现抖动,再回小一点
同理调节(Pitch_P)增大油门,直到接近起飞的位置,前后晃动飞行器,增大P值,直到出现抖动,再回小一点
航向yaw先不要动
增大P值直到出现振荡,然后稍微减小一点。
改变I值直到偏差程度达到无法接受的程度,然后稍微增大一点。
减小D值(请注意是增大参数值)直到出现大动作控制时回中速度变慢,然后稍微增大一点D值(请注意是减小参数
使用Mission Play 在线调参,
把遥控的第六通道映射到一个旋钮,在扩展设置里进行单个参数在线调试
Rate Roll/Pitch好的调试原则是在不产生震动的情况下P尽可能高。(这样会很跟手,飞机容易操控)P值越高力度越大,控制力越大,值越小控制力越小。I和D负责修正P值大了造成的错误
I修正P的累计错误(什么叫累计,就是长时错误,表现在飞机上就是漂移,你让飞机成一定角度飞出去,没打杆,但是飞机自己就栽头或者上扬,这就是累计错误。记住I只管这个事儿,除了漂移啥都不管)
D值关系到飞机的某个轴是不是太快的达到目标值。如果飞机在打杆时非常快速的响应,那么它有可能超过了需要响应的预定位置,然后自己再向回纠正,这就造成了抖动,增加D值可以修正这种抖动。(引用原文的话bounce back{跳回},D只管跳回,其他的啥都不管。我下面详细讲。)D值尽可能小,太高的D值会导致电动机噪声太大(啥是电动机噪声,我下面详细说)。
PID三个参数的直观作用:
教你手动调节APM/PIXHAWK的PID
官网PID 设置