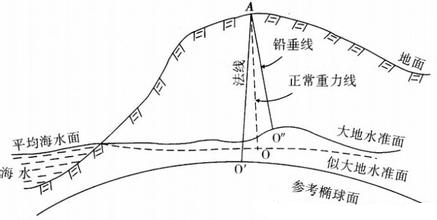
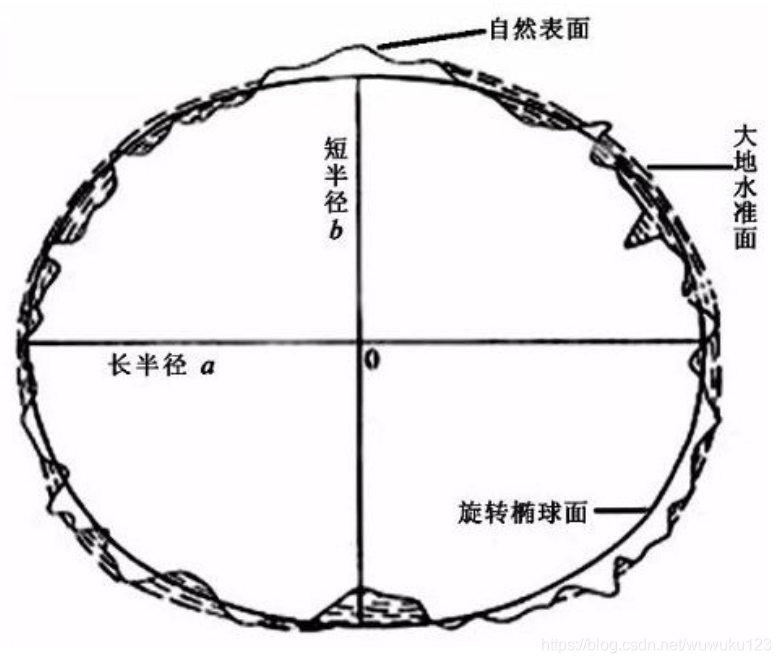
大地测量学模型所表示的地球表面,所有点的当地重力矢量都垂直于该表面,即一个“等位面”;这种形状称为大地水准面!
但是由于表面及其不规则,见如下图:
真实的地球据说如下:
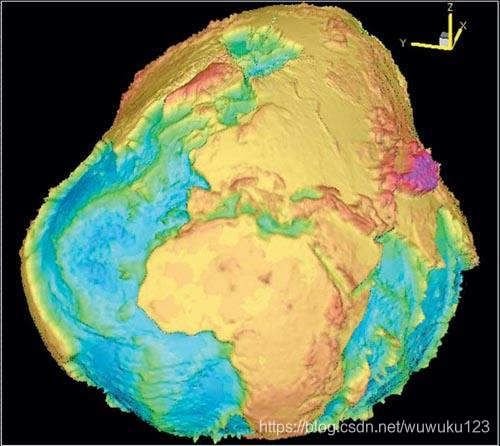
地球真实不是一个正球体,而是一个极半径略短、赤道半径略长,北极略突出、南极略扁平,近于梨形的椭球体
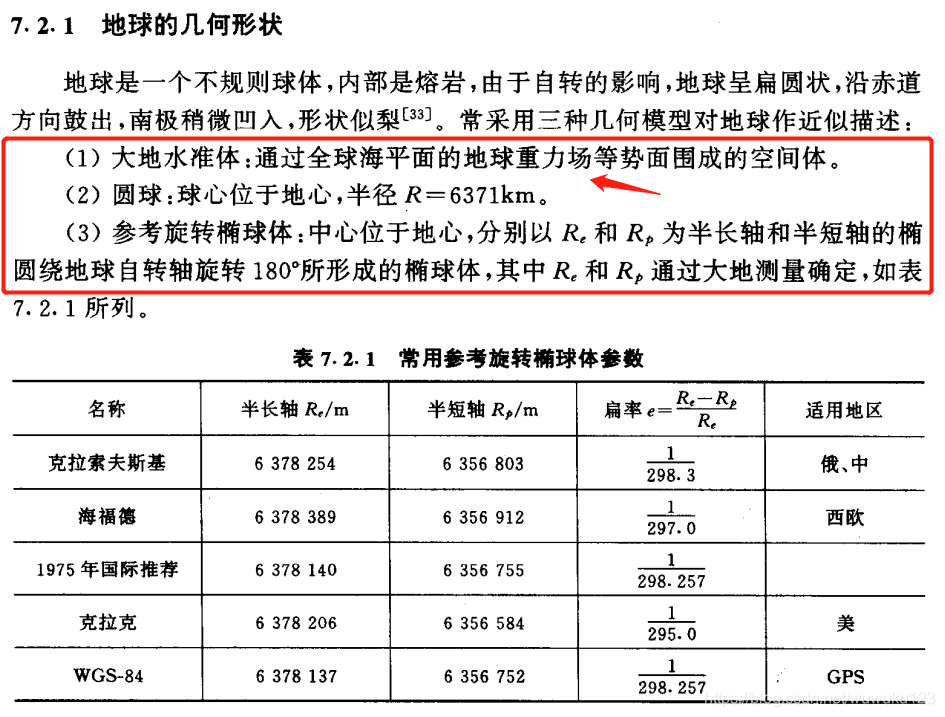
鉴于地球重力表面的不规则,不能用作确定空间坐标的表面,因此,使用了一种更接近于大地水准面模型的几何学形状——椭球体!(简单将,就是绕椭圆短半轴旋转而成的三维形体)
以下是秦永元 《惯性导航》 第七章
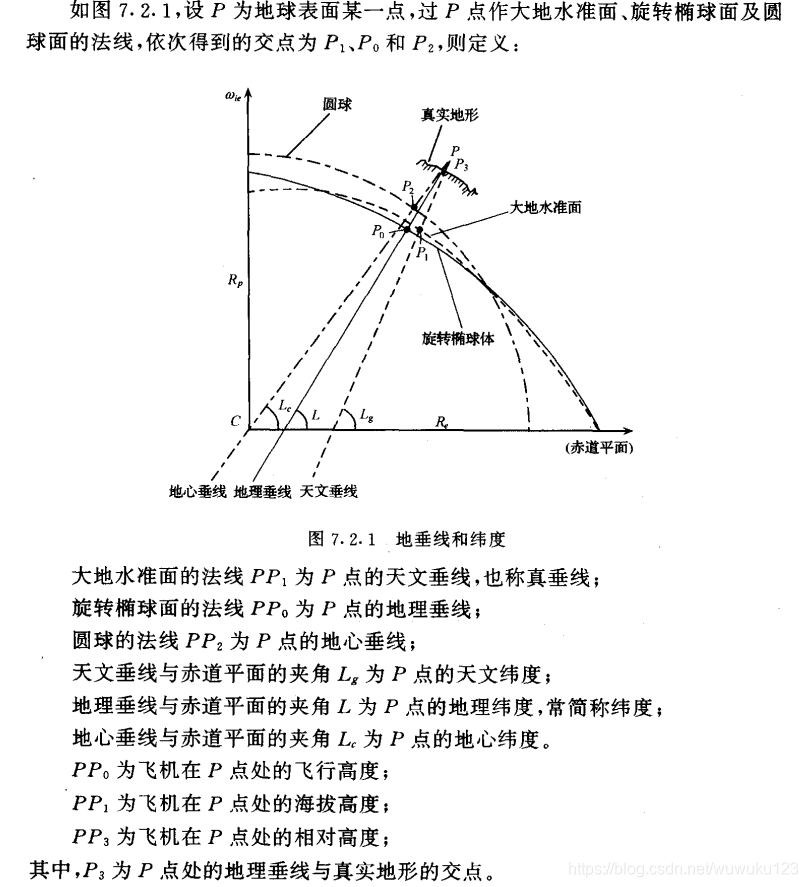
简单讲:
地球表面某一点的天文纬度: 指的是通过该点,且垂直于大地水准面上该点的切线,即法线和赤道表面的夹角
地球表面某一点的地心纬度:指的是通过该点和地球中心的直线与赤道表面的夹角;
地球表面某一点的大地纬度 / 地理纬度:是指通过该点,且垂直于参考椭球上该点的切线,即法线和赤道表面的夹角;(《捷联惯性导航技术》P35、P39,图3.30)
比如说WGS-84坐标系下输出的纬度为:地理纬度/地理纬度、大地高!
Geodetic latitude 大地纬度 geographic latitude地理纬度
geocentric latitude 地心纬度
海拔高度/绝对高程为:目标点到大地水准面之间的距离;
卫星导航接收机输出高度/ 大地高:目标点到参考旋转椭球体距离(比如WGS84框架下)
ellipsoidal height :
geodetic height :
王慧麟等编著的《测量与地图学》(南大出版社,2004年)中对这两个概念有明确表述:
点位沿椭球面的法线至椭球面的高度称“大地高”;
点位沿铅垂线至大地水准面的高度称海拔高,也称作“正高”。
在实践中,地形图上标出的高度是海拔高,GPS读出的高度是大地高。

参考:
地理纬度
大地纬度
大地水准面
https://baike.baidu.com/item/%E5%A4%A7%E5%9C%B0%E6%B0%B4%E5%87%86%E9%9D%A2/4305092?fr=aladdin
正常高、大地高、海拔高的测绘概念
GIS干货分享 | 最为详尽的坐标系统知识分享
参考论文:
高程现代化问题 魏子卿
GPS测定正高的方法及误差分析