相关文章

java sift 图片相似度,简单快速的图像相似性比较方法
我最近也面临同样的问题,为了解决这个问题(简单快速的算法比较两个图像),我贡献了 img_hash module 要打开“控制”,您可以从 this link . img_哈希模块提供六种图像哈希算法,非常容易使用。 代码示例 起源Lena 模糊莉娜 调整Lena的大小 移动Lena #include #include #include…

图像特征提取(二)——SIFT算法详解
转载自:http://blog.csdn.net/zddblog/article/details/7521424尺度不变特征变换匹配算法详解
Scale Invariant Feature Transform(SIFT)Just For Fun
zdd zddmailgmail.com or (zddhubgmail.com)
对于初学者,从David G.Lowe的论文到实现,有许多鸿沟…

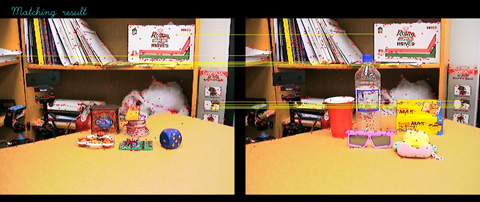
Matlab实现sift特征检测+图像拼接
Matlab实现sift特征检测图像拼接共有12个m文件,其中main为主程序,点击运行即可。
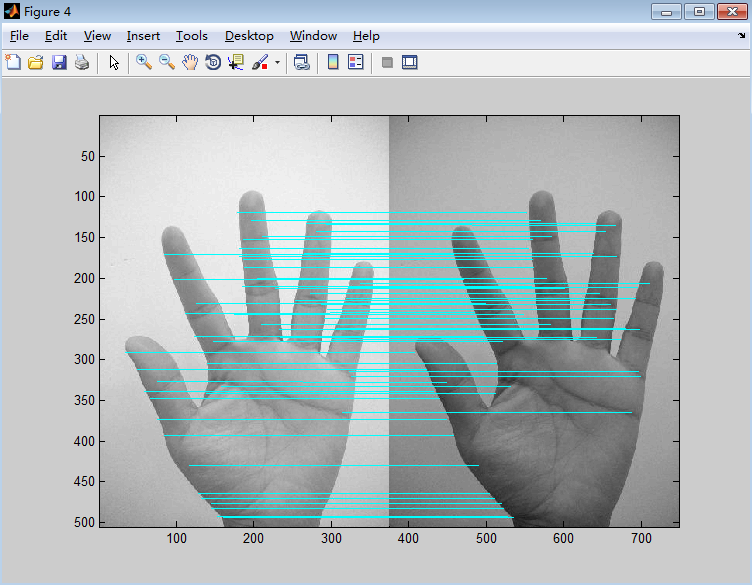
一、部分代码示例
close all;
clear;
clc;im1imread(test3.png);
im2imread(test4.png);gray1img2gray(im1);
gray2img2gray(im2);[des1,loc1]sift(gray1);
[des2,loc2]…

sfm算法之三角化(三角测量)
sfm算法流程一般是特征点提取、特征点匹配、计算本质矩阵/基础矩阵,最后三角化。但是利用机械臂去观察周围,前后帧姿态变化参数是具有的,所以不需要通过基础矩阵获取。 即利用机械臂的信息直接进行深度估计。已知:手眼标定、相机外…

Python机器视觉--OpenCV进阶(核心)-边缘检测之SIFT关键点检测
SIFT关键点检测
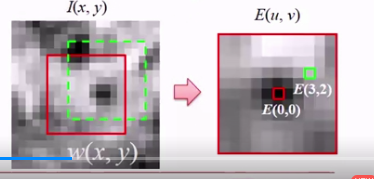
SIFT,即尺度不变特征变换(Scale-invariant feature transform,SIFT),是用于图像处理领域的一种描述。这种描述具有尺度不变性,可在图像中检测出关键点,是一种局部特征描述子。 …
图像特征与描述子(直方图, 聚类, 边缘检测, 兴趣点/关键点, Harris角点, 斑点(Blob), SIFI, 纹理特征)...
1.直方图 用于计算图片特征,表达, 使得数据具有总结性, 颜色直方图对数据空间进行量化,好比10个bin 2. 聚类 类内对象的相关性高 类间对象的相关性差 常用算法:kmeans, EM算法, meanshift&#…
SIFI尺度不变特征变换算法
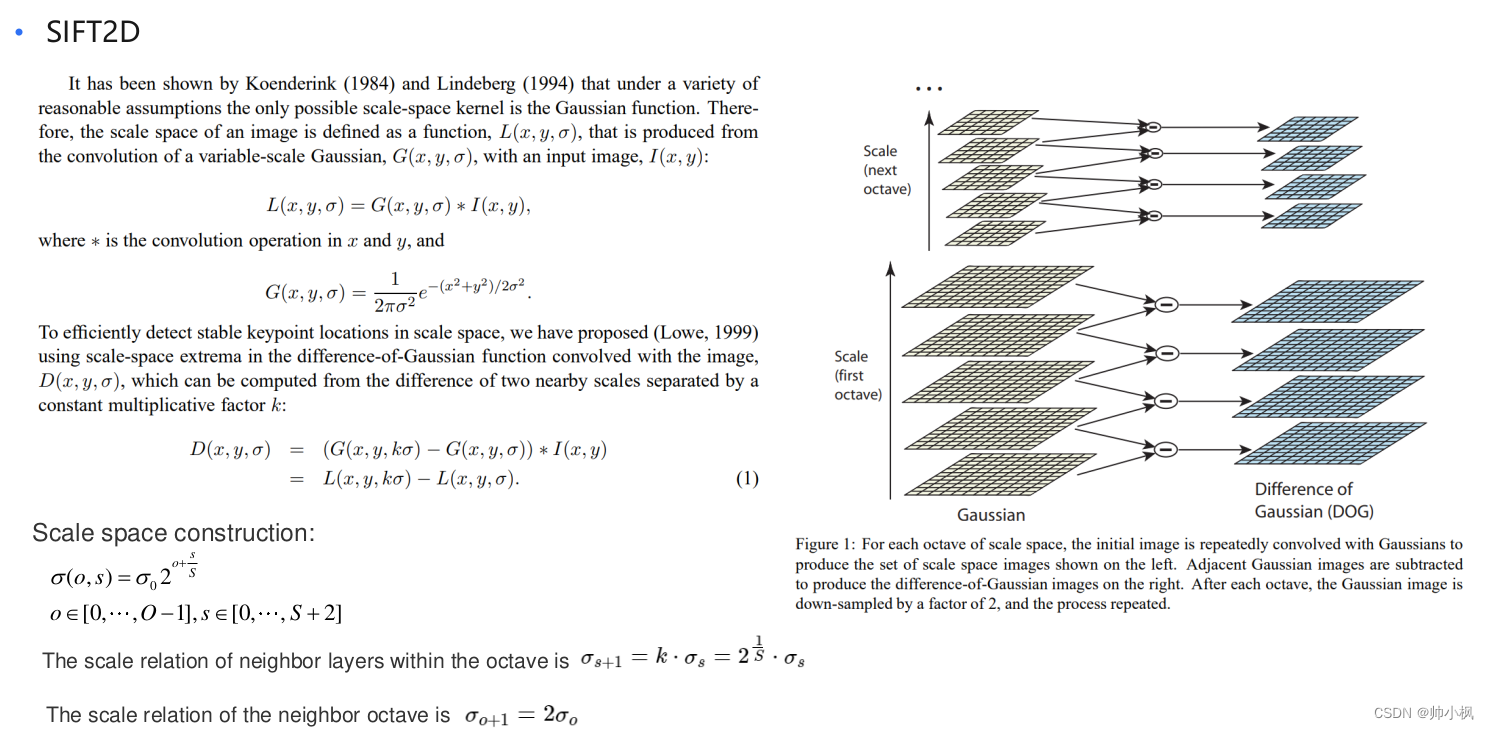
SIFT 尺度不变特征变换算法 David Lowe关于Sfit算法,2004年发表在Int. Journal of Computer Vision的经典论文中,对尺度空间(scal space)是这样定义的 : It has been shown by Koenderink (1984) and Lindeberg (1994) that un…
Opencv图像识别从零到精通(34)---SIFI
一、理论知识 Scale Invariant Feature Transform,尺度不变特征变换匹配算法,对于算法的理论介绍,可以参考这篇文章http://blog.csdn.net/qq_20823641/article/details/51692415,里面很详细,可以更好的学习。这里就不多…

32-SIFI特征点提取(EmguCV学习)
文章目录 RecordCode效果 Record
1、特征点检测与匹配常用的算法:FAST(FastFeatureDetector)、STAR(StarFeatureDetector)、SIFT、SURF、ORB、MSER、GFTT(GoodFeaturesToTrackDetector)、HARRI…

特征点匹配(SIFI)
1.SIFI
https://blog.csdn.net/weixin_38404120/article/details/73740612(参考了这个作者的内容)
结合书上加博客的内容进行理解;
求取SIFI特征的步骤:
首先要对图像归一化,然后将图像扩大为原来的两倍࿰…

SIFI和ORB在尺度缩放、旋转、仿射上的特征点不变实验代码,并比较SIFI和ORB提取特征点的速度
SIFI和ORB在尺度缩放、旋转、仿射上的特征点不变 一、SIFI算法1.验证旋转不变性2.验证尺度不变性3.验证仿射不变性 对原图进行仿射变换并输出 二、ORB算法1.验证旋转不变性2.验证尺度不变性3.验证仿射不变性 对原图进行仿射变换并输出 三、比较SIFT和ORB的尺度旋转,…
欧几里得范数/欧几里得距离(L2范数)
首先m维空间的概念: Rm的距离结构:
2维平面空间: m维空间: 范形空间距离
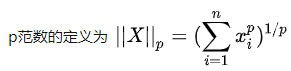
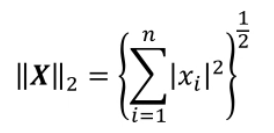
n维矢量空间中的元素X的Lp范数: 其中X是一连串的向量 最常用的是L2范数: 本质是一个距离概念
参考:《数学分析》
概念理解_L2范数(欧几里得范数)
L2范数 L2范数、欧几里得范数一些概念。 首先,明确一点,常用到的几个概念,含义相同。 欧几里得范数(Euclidean norm) 欧式长度 L2 范数 L2距离 Euclidean norm Euclidean length L2 norm L2 distance norm 对于一…

0范数,1范数,欧几里得范数等范数总结
以下分别列举常用的向量范数和矩阵范数的定义。 向量范数
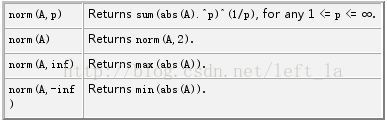
1-范数: 即向量元素绝对值之和,matlab调用函数norm(x, 1) 。
2-范数: Euclid范数(欧几里得范数,常用计算向量长度),即向量元素绝对值…
范数、正则化、归一化、标准化
在总结正则化(Regularization)之前,我们先谈一谈正则化是什么,为什么要正则化。 个人认为正则化这个字眼有点太过抽象和宽泛,其实正则化的本质很简单,就是对某一问题加以先验的限制或约束以达到某种特定目的…
常见向量范数和矩阵范数
1、向量范数 1-范数:,即向量元素绝对值之和,matlab调用函数norm(x, 1) 。 2-范数:,Euclid范数(欧几里得范数,常用计算向量长度),即向量元素绝对值的平方和再开方…