微分滤波器
本质:逻辑上,平滑使用的是积分,锐化则应使用微分。
1.索贝尔(Sobel)导数
索贝尔算子可以实现任意阶导数和混合偏导数。
本质:求得图像的一阶或二阶近似梯度图像。
void Sobel( InputArray src, OutputArray dst, int ddepth,int dx, int dy, int ksize = 3,double scale = 1, double delta = 0,int borderType = BORDER_DEFAULT );
参数:src:源图像。
dst:目标图像。
ddepth:图像的深度和类型。
dx:x方向求导次数。
dy:y方向求导次数。
ksize:滤波器尺寸。
scale:结果线性处理系数。
delta:结构偏移处理系数。
borderType:边界添加类型。
其中:dst=sacle*dst1+delta
以求图像一阶梯度图像,最小模板即3X3为例:
首先:离散函数x,y方向上的梯度大小为
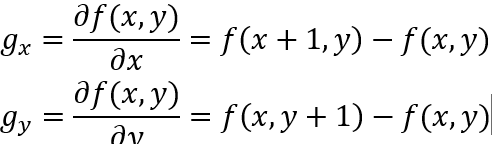
二维梯度大小为:

实际计算时:常常取:
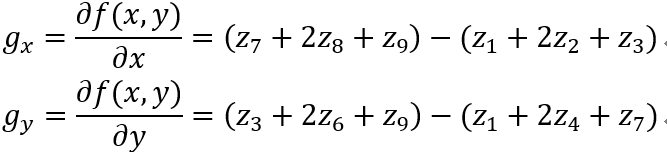
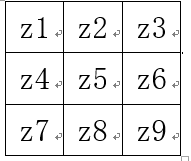
最终:

从离散函数求导的角度来说,核的size越大自然越接近导数,但对于像素值剧烈变换的像素点来说,大Size反而会使结果发生较大偏差。
2.Scharr滤波器
类似于Sobel,只不过核的Size被固定为3x3。
void Scharr( InputArray src, OutputArray dst, int ddepth,int dx, int dy, double scale = 1, double delta = 0,int borderType = BORDER_DEFAULT );
参数:src:源图像。
dst:目标图像。
ddepth:图像的深度和类型。
dx:x方向求导次数。
dy:y方向求导次数。
scale:结果线性处理系数。
delta:结构偏移处理系数。
borderType:边界添加类型
3. 拉普拉斯变换
由微分的图像信息得知:图像的一阶微分产生较粗的边缘,二阶微分产生由零分开的一个像素宽的双边缘。在增强细节方面二阶微分比一阶微分好得多。
拉普拉斯算子(二阶微分):

拉普拉斯算子应用:突出被大值包围的点或者被小值包围的点。同时可用于边缘检测。
void Laplacian( InputArray src, OutputArray dst, int ddepth,int ksize = 1, double scale = 1, double delta = 0,int borderType = BORDER_DEFAULT );参数:src:源图像。
dst:目标图像。
ddepth:图像的深度和类型。
ksize:核尺寸。
scale:结果线性处理系数。
delta:结构偏移处理系数。
borderType:边界添加类型