Eigen入门系列 —— Eigen::Matrix矩阵基本加减、数乘运算
- 前言
- 程序说明
- 输出结果
- 代码示例
前言
随着工业自动化、智能化的不断推进,机器视觉(2D/3D)在工业领域的应用和重要程度也同步激增(识别、定位、抓取、测量,缺陷检测等),而针对不同作业场景进行解决方案设计时,通常会借助PCL、OpenCV、Eigen等简单方便的开源算法库进行方案的快速验证和迭代以满足作业场景下的目标需求。
为了让对工业机器视觉方向感兴趣的同学能够少走一些弯路,故推出了此一系列简易入门教程示例,让初次使用者能够最简单直观地感受到当前所用算法模块的执行效果。
后续会逐步扩增与工业机器视觉相关的一些其它内容,如:
项目案例剖析、场景数据分析、基础算法模块、相机评测 等;
如有兴趣可加入群聊(若入群二维码被屏蔽,则可以通过Q群(1032861997)或评论、私信博主“群聊”,邀请入群),与同道同学及圈内同行一起交流讨论。

程序说明
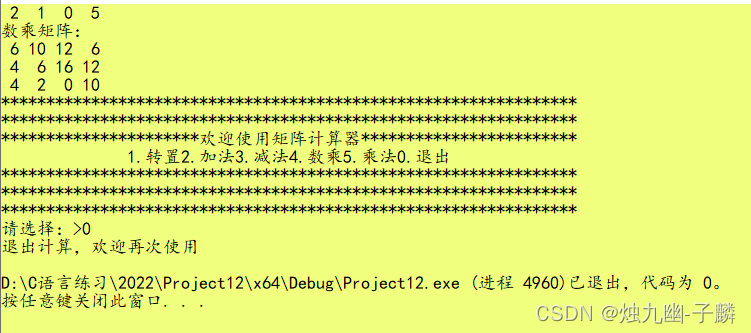
展示Eigen::Matrix矩阵基本运算,加减、数乘等;
输出结果

代码示例
/** @File: basic_arithmetic.cpp* @Brief: eigen course* @Description: 展示Eigen::Matrix矩阵基本运算* @Version: 0.0.1* @Author: MuYv*/
#include <iostream>
#include <Eigen/Dense>int main(int argc, char** argv){// Eigen::Matrix为模板类,可自由定义不同维度的矩阵,// 此处仅展示较为常用的几种数据类型,其它定制化需求类型的使用,可以此类推;// 自定义创建4x4的矩阵,模板参数依次为:数据类型,行数,列数;Eigen::Matrix<float, 4, 4> matrix_4f;// 使用常数值进行初始化填充;matrix_4f = Eigen::Matrix<float,4,4>::Constant(1.0f);std::cout<<"matrix_4f constant init:\n"<<matrix_4f<<std::endl;Eigen::Matrix4f matrix_4f_tmp = Eigen::Matrix4f::Constant(2.0);std::cout<<"matrix_4f_tmp:\n"<<matrix_4f_tmp<<std::endl<<std::endl;// 与等大小矩阵// 加法std::cout<<"matrix_4f + matrix_4f_tmp:\n"<<(matrix_4f + matrix_4f_tmp)<<std::endl<<std::endl;// 减法std::cout<<"matrix_4f - matrix_4f_tmp:\n"<<(matrix_4f - matrix_4f_tmp)<<std::endl<<std::endl;// 乘法std::cout<<"matrix_4f * matrix_4f_tmp:\n"<<(matrix_4f * matrix_4f_tmp)<<std::endl<<std::endl;// 与数值std::cout<<"matrix_4f * 9:\n"<<(matrix_4f * 9)<<std::endl<<std::endl;std::cout<<"matrix_4f / 2:\n"<<(matrix_4f / 2)<<std::endl<<std::endl;// 3x1 列向量Eigen::Vector3f vector_3f(1.0f, 2.0f, 3.0f);std::cout<<"vector_3f:\n"<<vector_3f<<std::endl;Eigen::Vector3f vector_3f_tmp = Eigen::Vector3f::Constant(4.0f);std::cout<<"vector_3f_tmp:\n"<<vector_3f_tmp<<std::endl<<std::endl;// 与等大小向量// 加法std::cout<<"vector_3f + vector_3f_tmp:\n"<<(vector_3f + vector_3f_tmp)<<std::endl<<std::endl;// 减法std::cout<<"vector_3f - vector_3f_tmp:\n"<<(vector_3f - vector_3f_tmp)<<std::endl<<std::endl;// 与数值std::cout<<"vector_3f * 9:\n"<<(vector_3f * 9)<<std::endl<<std::endl;std::cout<<"vector_3f / 2:\n"<<(vector_3f / 2)<<std::endl<<std::endl;return 0;
}









![【MATLAB图像融合】[14]PCNN脉冲耦合神经网络代码分享](https://img-blog.csdnimg.cn/2020091111014875.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3N1ZGE1Mzk1,size_16,color_FFFFFF,t_70#pic_center)


![【MATLAB图像融合】[18]双通道PCNN模型实现图像融合](https://img-blog.csdnimg.cn/20210701180529996.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3N1ZGE1Mzk1,size_16,color_FFFFFF,t_70)