记录我看的论文中基于的技术,对他们进行大概介绍
- Shamir 秘密共享方案
- 零知识证明
- EIGamal密码体制
Shamir 秘密共享方案
1979年,Shamir提出的一个基于拉格朗日插值的(k,n)门限方案
-
目的:可以将秘密s分给n个成员,规定至少有k(k <= n)个成员的信息,就可以恢复出秘密s。k叫做恢复秘密的门限
-
实现方法:
-
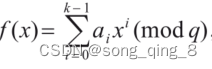
初始化阶段:在有限域Zq(q为大素数)上,D选择一个(k-1)次多项式f(x) ,s作为秘密存储在第一个系数a0 中
(我们知道要解出f(x)我们需要k个式子,得到k个k元一次方程,才能解出所有系数a)
-
秘密分发阶段:
秘密拥有者根据组成员的公开身份信息Pi,计算si=f(Pi) (mod q)作为组成员的秘密份额,并把si通过秘密信道分发给组成员Ui,1=< i <= n.
(得到一个k元一次方程) -
秘密重构阶段:
当组成员想要恢复秘密s,他们只需要k个组成员的秘密份额,便可以重构出多项式f(x) =

-
注意:素数q需要大于秘密s和组成员总数n,并且公开,随机多项式的系数ai,1<=i<=n是秘密信息,在生成n个秘密份额后销毁。
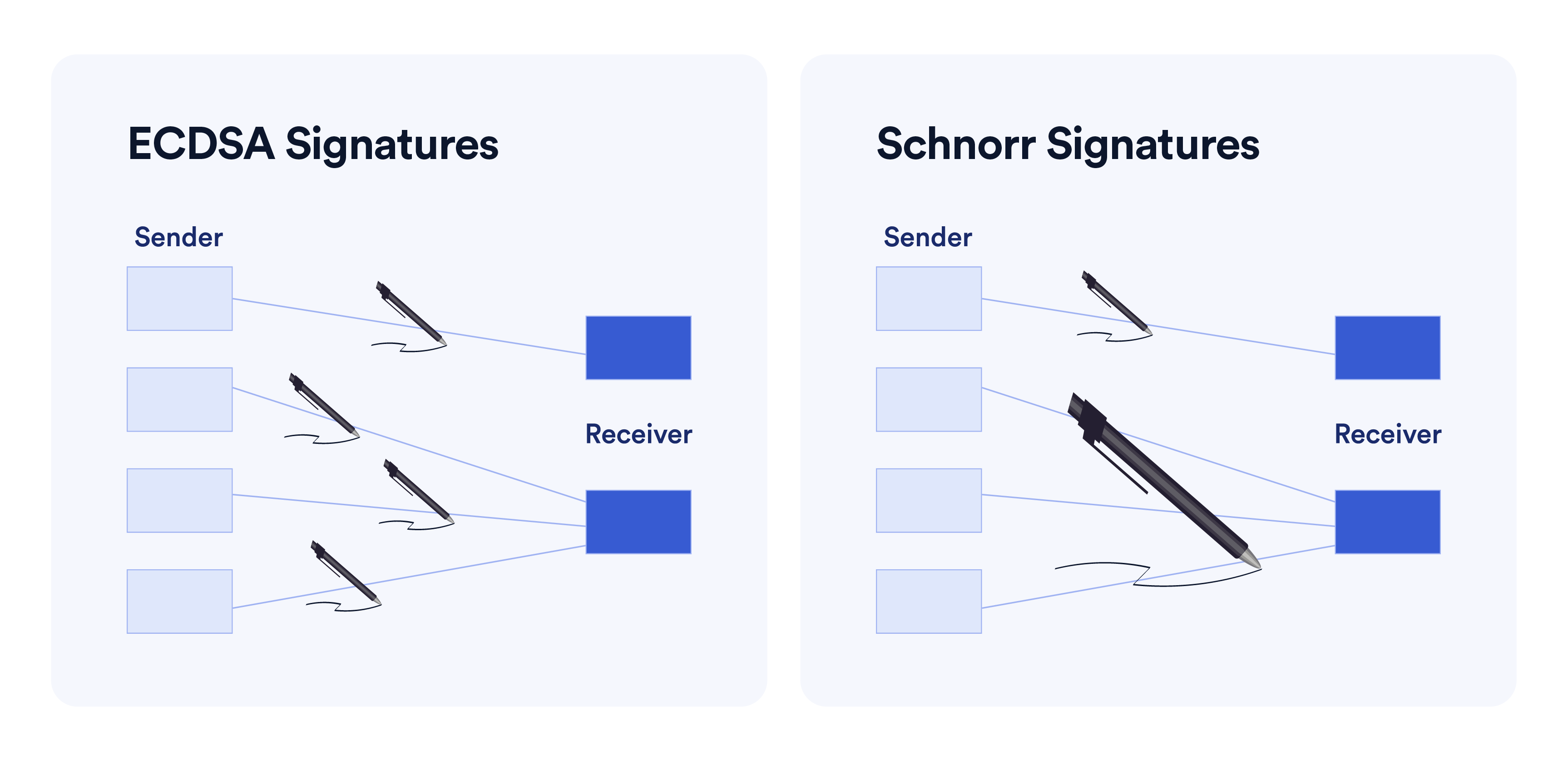
零知识证明
Schnorr 零知识证明(Zero Knowledge proof)是德国数学家与密码学家 Schnorr在1991 年提出的基于离散对数难题的一种证明体制。
“零知识”表现在当证明者 Prover想要向验证者 Verifier 证明自己知道某个秘密 x 的值时,通过 Schnorr 零知识证明,能在不泄露 x 的任何信息的情况下完成,即整个过程 Verifier 对 x 获得的知识为零。
EIGamal密码体制
EIGamal密码体制的安全性依赖于有限域离散对数困难问题。1985年EIGamal1提出一个有限域(Zq*)上的离散对数问题的公钥密码体制。具体表述如下:
- Alice 选择循环群G,阶数q,G的生成元g,Alice选择x属于Zq*,作为私钥,计算h=gx,公开{h,G,q,g},保密x。
- Bob要发送密文m给Alice,使用Alice公钥进行加密:
选择随机数k属于Zq*,计算y1=gk mod q,y2=m·hk mod q,发送密文{y1,y2}给Bob - Alice接受到密文,使用私钥进行解密:
Bob计算m’ = y2·(y1a)-1 - 证明:
- y2·(y1a)-1 = m·hk ·(gak)-1 =m·gak·(gak)-1=m
Gamal T E . A public key cryptosystem and a signature scheme based on discrete logarithms[J]. IEEE Transactions on Information Theory, 1985, 31:469-472. ↩︎