我们已经在 BSV 上实现了 Schnorr 签名。这是第一个也是唯一一个已知的实现,没有对原始协议进行任何更改¹。

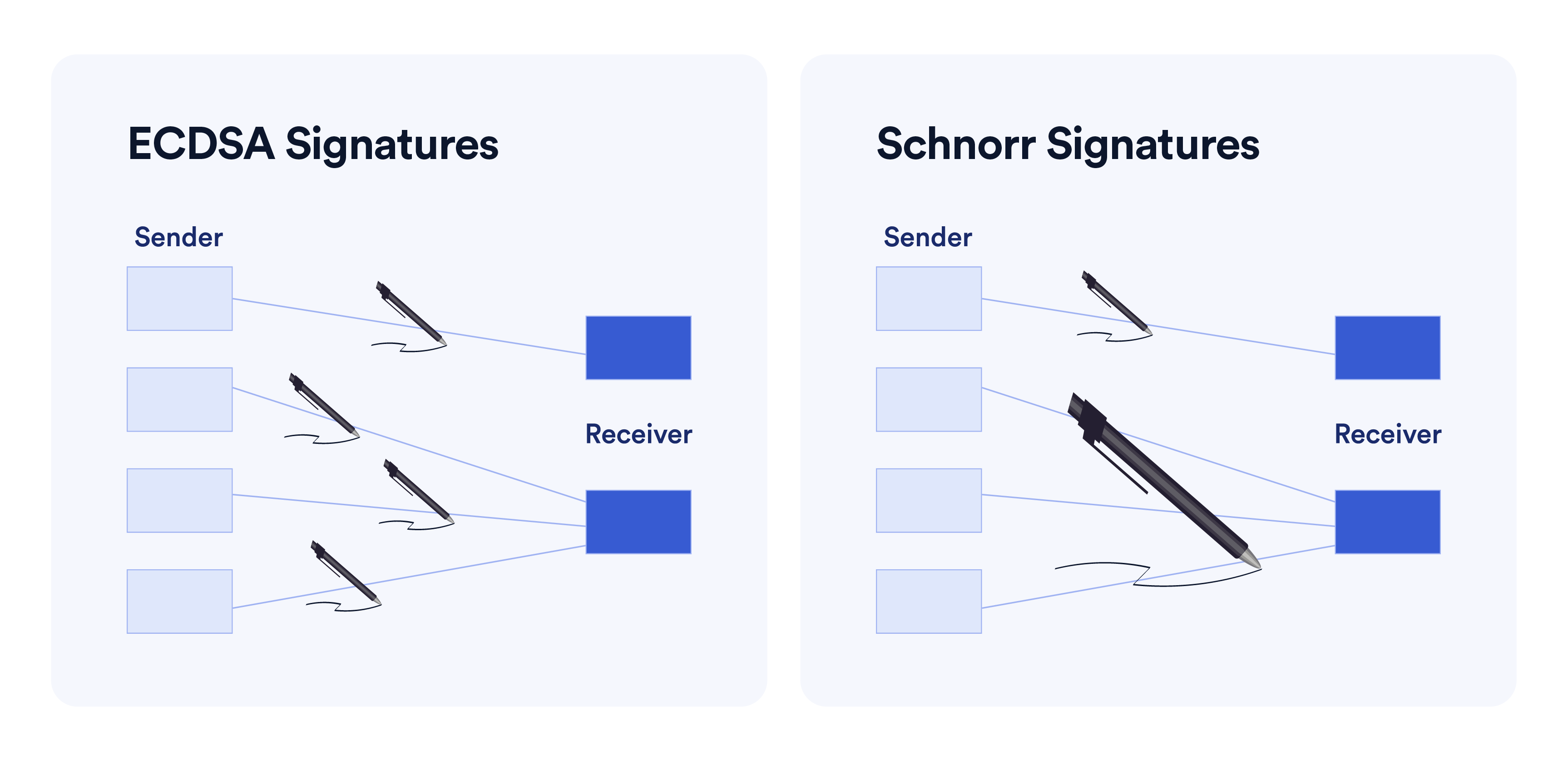
Schnorr 是一种可以用于替代比特币签名当前使用的 ECDSA 算法的替代算法。一个关键优势是,同一交易的一个输入或多个输入中的多个签名可以聚合为一个签名。关于 BTC 上的 Schnoor 签名有很多炒作,但是都需要像 BIP 340 细节一样进行巨大的更改。
我们将展示了如何通过原始的比特币协议来实现它。下面列出了验证 Schnorr 签名的完整代码,其中使用我们之前发布的椭圆曲线操作。
import "ec.scrypt";// Schnorr signatures verification for secp256k1
contract Schnorr {public function verify(Sig sig, PubKey pubKey, bytes msg, int lambda,Point R, PointMulAux rAux,Point E, PointMulAux eAux,Point S, PointMulAux sAux) {int r = unpack(pubKey[ : 32]);int s = unpack(pubKey[32 : 64]);// R = r * Grequire(EC.isMul(EC.G, r, R, rAux));// e = Hash(r || P || msg)int e = unpack(sha256(pack(r) + pubKey + msg));// E = e * PPoint P = pubKey2Point(pubKey);require(EC.isMul(P, e, E, eAux));// S = s * Grequire(EC.isMul(EC.G, s, S, sAux));// S == R + H?require(EC.isSum(R, E, lambda, S));}// convert public key to a point, assuming it's uncompressedstatic function pubKey2Point(PubKey pubKey) : Point {require(pubKey[: 1] == b'04');return { unpack(pubKey[1 : 33]), unpack(pubKey[33 : 65]) };}
}[1] 使用 Schnorr 签名的法律含义超出了本文的范围。