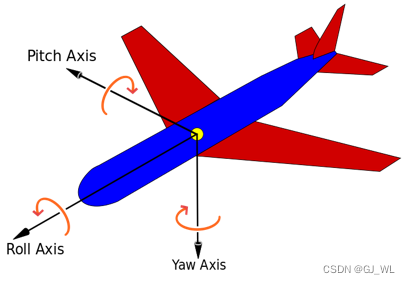
我们知道用欧拉角表示空间的旋转,容易产生万向锁(Gimbal Lock)问题,这常常不太容易理解。下面给出一个直观的数学解释。
欧拉角表示的空间旋转,可以用绕三个坐标轴的旋转矩阵的乘积表示

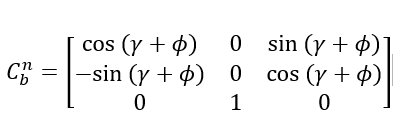
万向锁问题就是出现在这种表示方法中。 假如我们令 β = 90 ° \beta=90° β=90°,上面的 R R R就等于:

我们对这个 R R R进行一下化简,并且利用三角函数公式,可以得到

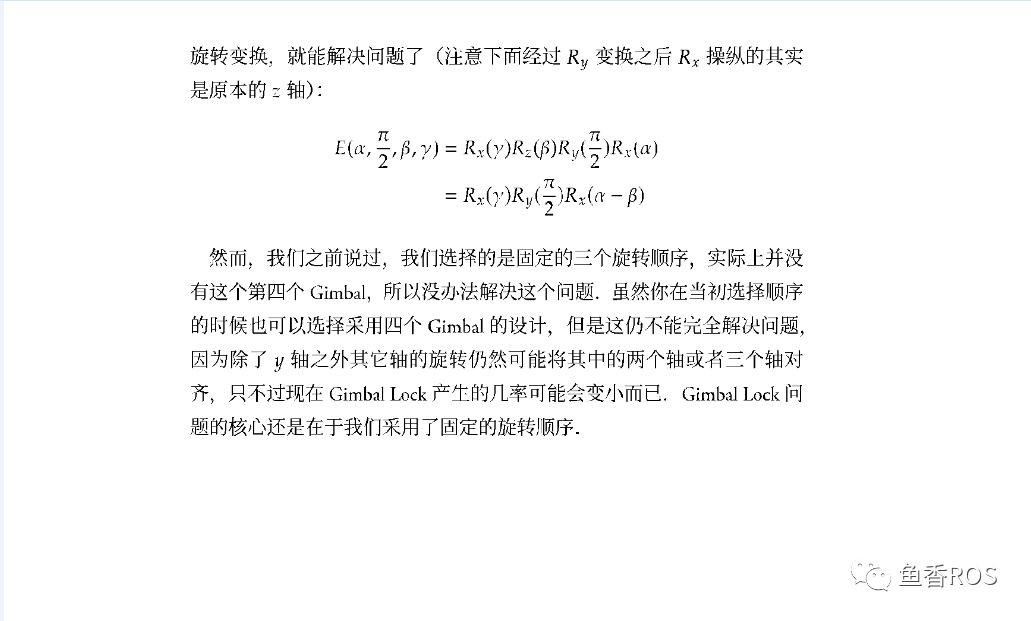
也即当 β = 90 ° \beta=90° β=90°时,另外两个自由度 α , γ \alpha,\gamma α,γ,变成了一个自由度 α + γ \alpha+\gamma α+γ,丢失了一个自由度,也即出现了有些空间旋转不能表示的问题,这个问题就是万向锁。




![[视觉SLAM十四讲]学习笔记2-关于欧拉角和万向锁](https://img-blog.csdnimg.cn/7e85bbf84425495e8351fc12f9701693.png#pic_center)