1 欧拉角&万向锁
欧拉角和万向锁
视频资料理解万向锁
核心是嵌套
以一个三自由度的机械臂为例,三个旋转轴互相垂直,相当于x,y,z轴
三个机械臂通过旋转关节依次串联,定义第一个关节旋转轴为J1,以此类推第二第三个关节旋转轴为J2,J3,那么J1为第一个旋转轴,它的旋转会带动J2和J3一起运动,而由于J2是安装在J1的机械臂上,所以J2的旋转不会影响到J1,只能带动J3运动,而J3是安装在J2的机械臂上,所以J3的旋转不会影响J1和J2,只会自己旋转,原理基本如此。
那么万向锁的定义,就是本来j1、2、3有三个旋转方向,由于j2旋转90°使j1和j3的旋转轴共线,此时j1和j3产生的旋转方向就只有一个,加上j2的总共就两个,丢失了一个旋转方向。
这应该就是机器人里面不能有奇异点的一个原因,使得j1、j2、j3无论怎么调都无法得到想要的解
2 欧拉角&四元数
欧拉角、轴角与四元数最容易理解
轴角表示法与四元数的关系
四元素与轴角的表示很接近,也是使用一个3维向量表示转轴和一个角度分量表示绕此转轴的旋转角度,即(w,x,y,z), 其中:
w = cos(theta/2)
x = ax * sin(theta/2)
y = ay * sin(theta/2)
z = az * sin(theta/2)
轴角和四元数
如何通俗地解释欧拉角?之后为何要引入四元数?
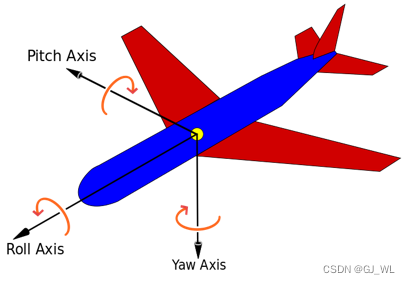
横滚角-roll、俯仰角-pitch、偏航角-yaw
3 旋转矩阵&四元数&欧拉角
欧拉角表示姿态时会遇到万向锁的问题,这会导致同一种空间状态欧拉角的表示方式不唯一,当出现万向锁现象时,同一种旋转有无数种欧拉角表示形式,从而导致了欧拉角差值时出现问题,因为当你俯仰角接近90°时,两组千差万别的欧拉角表示可以是同一种旋转。所以为了解决这些问题,数学上想出了用四元数的形式来表征姿态的方法。
旋转矩阵&四元数&欧拉角
四元数与欧拉角(Yaw、Pitch、Roll)的转换