首页
chatGPT知识
chatGPT问答
chatGPT百科
编程日记
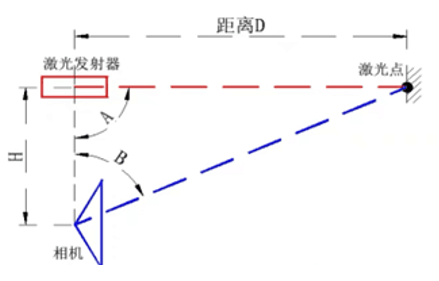
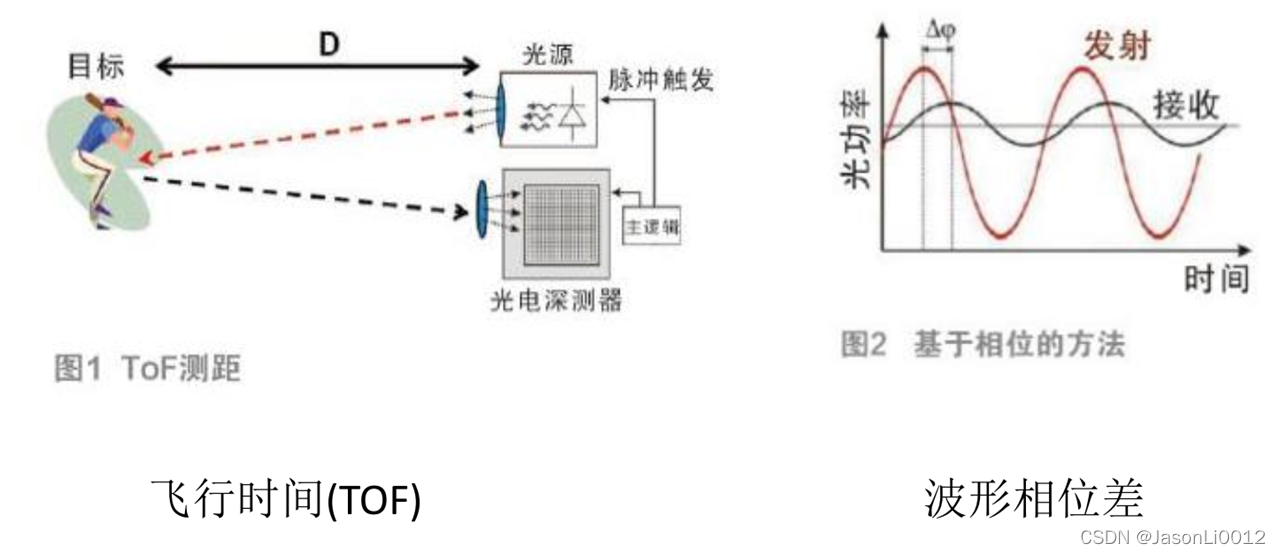
激光雷达三角测距原理
article
/
2025/11/5 16:53:38
激光发射器与相机相对位置确定,长度H和角度A已知。相机通过图像处理识别激光点,再根据小孔成像原理计算,可以得到角度B。
根据初中知识,
三角原理,边角角(SAA)
,
可可计算距离D
http://chatgpt.dhexx.cn/article/idqSHsjK.shtml
相关文章
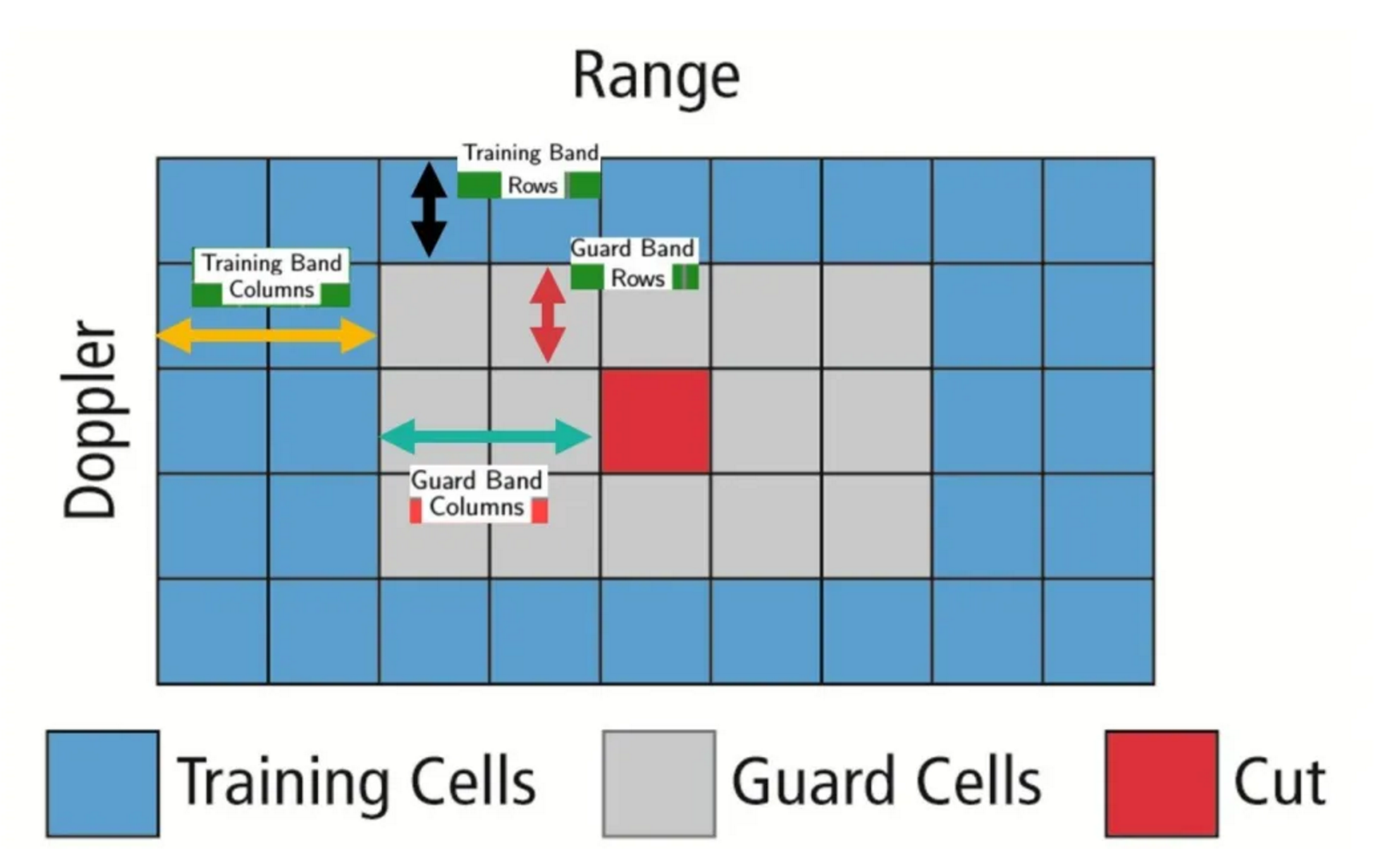
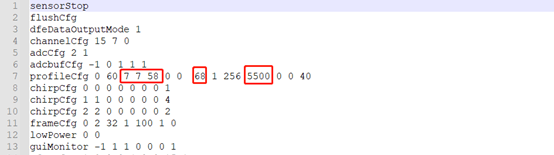
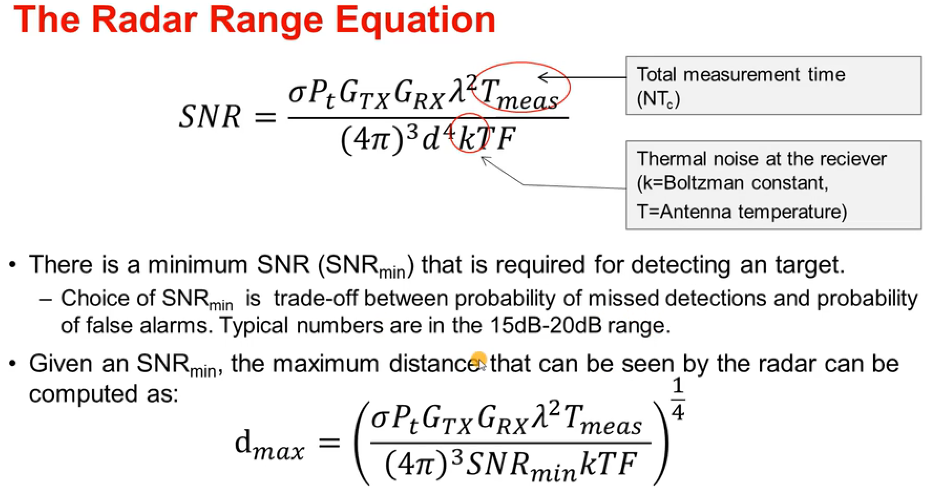
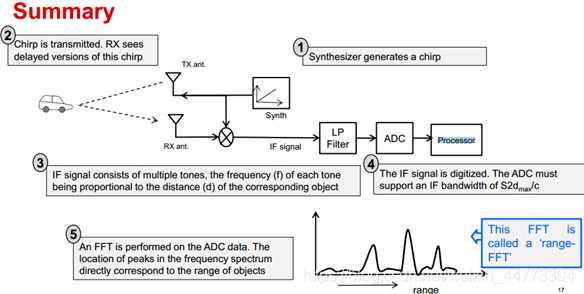
毫米波传感器原理介绍:测距
本篇文章介绍了毫米波传感器测距的一种原理,帮助嵌入式工程师在做雷达编程的时候能够对SDK代码有更清晰的认知,可以对测距部分逻辑进行修改和裁剪。 因为本篇是第一篇关于毫米波雷达传感器设备的介绍,我便多啰嗦两句。近几年随着无人驾驶等领…
阅读更多...
一文了解TOF、三角法测距和相位测距以及FMCW激光雷达测距原理
来源:光学追光者 激光雷达根据原理可以分为TOF(飞行时间),三角法测距和相位测距三种方式。 三角法测距为 三角测距法是利用相似三角形本地可以测得透镜中心和照射到CMOS/CCD上的距离,就可以得到物距,本地的…
阅读更多...
调频连续波雷达(FMCW)测距/测速原理
雷达按照发射信号种类分成脉冲雷达和连续波雷达两大类,常规脉冲雷达发射周期性的高频脉冲,连续波雷达发射的是连续波信号。 连续波雷达发射的信号可以是单频连续波(CW)或者调频连续波(FMCW),调频方式也有多种,常见的有三角波、锯…
阅读更多...
matlab激光雷达三角测距,三角测距激光雷达原理
激光雷达近几年越来越普及了,复杂的比如应用在无人驾驶汽车上,简单的比如用在扫地机上去。随着无人驾驶和服务机器人行业的发展,后续激光雷达的应用会更广泛。 激光雷达之所以流行,主要是因为它能够精准的测距,那么它是…
阅读更多...
【雷达】毫米波雷达(77GHz FMCW)——测距原理
FMCW RADAR 调频连续波雷达 1 毫米波雷达测距原理 (1)FMCW雷达的核心:chirp 频率fC开始的线性调频脉冲,4GHZ的带宽,最终以81GHZ的频率结束。 线性调频脉冲的斜率S:线性调频脉冲上升的速率。 带宽B和 斜…
阅读更多...
LFM雷达实现及USRP验证【章节2:LFM雷达测距】
目录 1. 参数设计 几个重要的约束关系 仿真参数设计 2. matlab雷达测距代码 完整源码 代码分析 回顾:LFM的基本原理请详见第一章 本章节将介绍LFM雷达测距的原理及实现 1. 雷达测距原理 参考: Radar测距及测速原理(1)——FMCW测距和测速原理及…
阅读更多...
毫米波雷达测距/测速原理介绍_小七自学笔记
Chirp Chirp是指频率随时间而改变(增加或减少)的信号, 这一术语可以与扫频信号(Sweep signal)互换使用. 它通常用于声纳、雷达和激光. 距离分辨率(Range Resolution) 雷达需要具备区分两个距离非常近的目标的能力,距离分辨率完全取决于chi…
阅读更多...
TI 毫米波雷达基本原理(1)——测距原理
1简介 毫米波雷达是指波长介于1~10mm的电磁波,波长短,频带宽,比较容易实现窄波束,雷达分辨率高,不易受干扰。 根据辐射电磁波方式不同,毫米波雷达主要分为脉冲体制以及连续波体制两种工作体制,…
阅读更多...
调频连续波雷达基本原理(1)-测距原理详解
毫米波雷达基本原理(1)-测距原理详解 本内容首发在【调皮连续波】公众号,持续更新。 大家好,欢迎来学习毫米波雷达基本原理,本节课将讲授的是毫米波雷达的测距原理。废话不多说,直接进入正题。 1、matla…
阅读更多...
FMCW雷达原理
FMCW即Frequency Modulated Continuous Wave,译为调频连续波。FMCW 雷达系统通过天线向外发射一列连续调频毫米波,并接收目标的反射信号。发射波的频率在时域中按调制电压的规律变化。FMCW 毫米波雷达的发射信号采用的是频率调制,常用的调制信…
阅读更多...
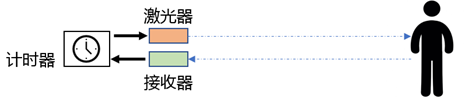
激光雷达原理介绍
激光雷达的工作原理 激光雷达根据测量原理可以分为三角法激光雷达、脉冲法激光雷达、相干法激光雷达。本文我们只针对脉冲法测距的激光雷达做分析。 基于脉冲法的激光雷达利用光速测距。激光发射器发射激光脉冲,计时器记录发射时间;脉冲经物体反射后由…
阅读更多...
无人驾驶传感器融合系列(四)——毫米波雷达测距原理(77GHz FMCW)
无人驾驶传感器融合系列(四)——毫米波雷达测距原理(77GHz FMCW) 本章摘要:介绍什么是调频连续波(FMCW),它是如何进行测距的,测距分辨率分析,测距范围分析。 …
阅读更多...
ROS- 激光雷达测距原理及主要参数
原文地址:https://blog.csdn.net/Draonly/article/details/103366388 一.激光的主要参数 激光雷达的主要参数包括测距范围、扫描频率、角分辨率、精度等几方面。 1.扫描频率 扫描频率表示一秒内雷达进行多少次扫描。扫描频率越大,设备对外界环境的感知…
阅读更多...
激光雷达:测距原理
激光雷达传感器 常见的激光雷达主要有三角测距和TOF两大类型。 1.三角测距 测量原理 如图所示,为三角测距激光雷达的原理图。首先激光发射器(Laser)发射激光,打到物体(Object)表面时,将反射至…
阅读更多...
三角法激光雷达测距原理
现在对三角测距方法踩踩坑。 买了一个rplidar A2, 做工不错,挺漂亮的,更重要的是可以软件启动停止,噪声很小,而且反射检测灵敏度比较高(可以扫描到毛玻璃, 有些差的激光雷达检测不到毛玻璃上的反射&#…
阅读更多...
FMCW雷达测速和测距原理介绍
在与测距相关的应用中,雷达一般工作在FMCW模式,其原理是将经过调制的连续波信号以较高的载频发射出去,遇到被测目标时,将接收到的回波信号与当下发射的高频信号进行混频得到差频信号。对于线性调频来说,差频的频率即携…
阅读更多...
雷达原理---脉冲法测距
文章目录 一、基本原理1. 测距的本质2. 定义回波到达时间 t R t_R tR的两种方法3. 回波脉冲中心估计的原理框图 二、影响测距精度的因素1. 电波传播速度变化产生的误差2. 大气折射引起的误差3. 测读方法误差 三、距离分辨力和测距范围1. 距离分辨力1.1 定义1.2 雷达距离分辨力…
阅读更多...
自动驾驶-毫米波雷达系列基础篇-测距原理
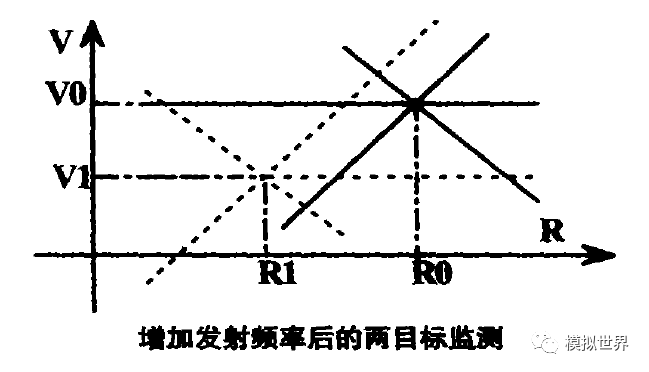
毫米波雷达的测距原理 1.毫米波雷达的测距原理1.1 单目标的测距原理1.2 多个目标测距过程1.3 距离分辨率1.4 雷达的最远测距1.5 小结 1.毫米波雷达的测距原理 问题思考: 1)单个目标雷达如何测距࿱…
阅读更多...
雷达测距测速测角基本原理
由雷达发射机产生的电磁波经收发开关后传输给天线,由天线将此电磁波定向辐射于大气中。电磁波在大气中以近光速传播,如目标恰好位于定向天线的波束内,则它将要截取一部分电磁波。目标将被截取的电磁波向各方向散射,其中部分散射的…
阅读更多...
雷达基础(一):测距
一、测距原理 测量发射信号经雷达到目标并由目标反射回雷达经历的时间,距离为: 对于FMCW雷达,发射的信号频率不是固定频率,而是线性增加,固可通过发射信号频率与接收信号的频率差进行计算。 ①单目标测距 为发射信号…
阅读更多...
推荐文章
chatgpt中文意思——预训练生成聊天模型
ChatGPT 应用合集
使用ChatGPT
chatPDF | 别再自己读文献了!让chatGPT来帮你读吧!~
基于 ChatGPT 实现一个 PDF 阅读器
【ChatGPT】ChatGPT还能保持多久的神话?
uniapp 离线打包 添加文件读写权限
python 文件读写操作总结
Linux监控文件读写
C#文件读写操作 [详细]
Qml读写文件
文件读写基本流程