激光雷达近几年越来越普及了,复杂的比如应用在无人驾驶汽车上,简单的比如用在扫地机上去。随着无人驾驶和服务机器人行业的发展,后续激光雷达的应用会更广泛。
激光雷达之所以流行,主要是因为它能够精准的测距,那么它是如何实现这样的测距功能的呢?
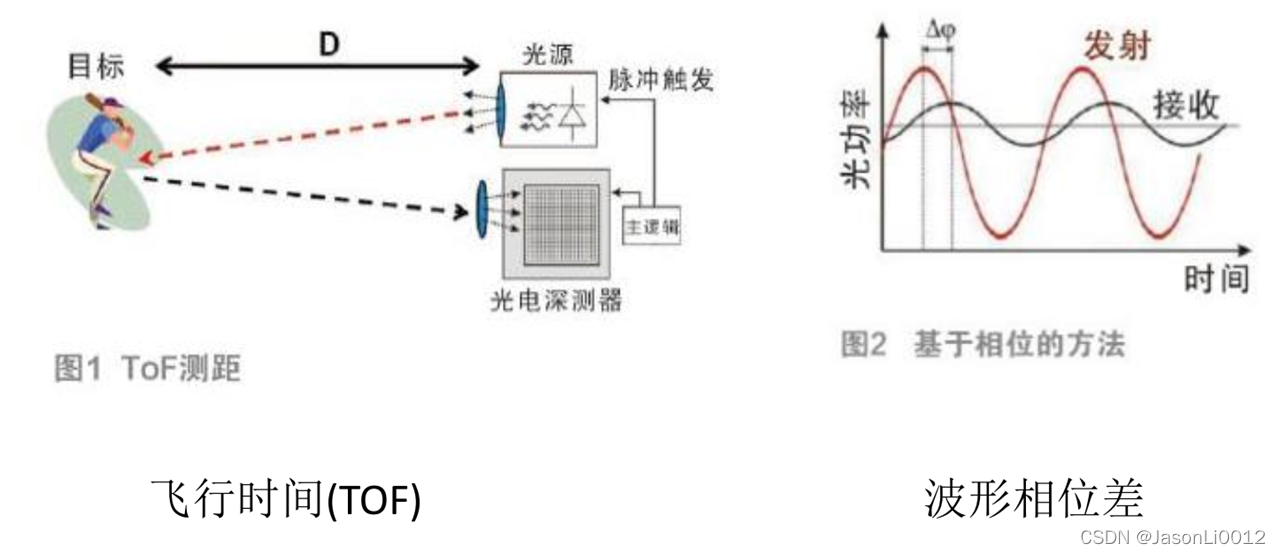
主流的激光雷达主要是基于两种原理的,一种是三角测距法,一种是飞行时间(TOF)法。听名字可不要觉得很复杂,其实只需要高中知识,任何人都能看懂它的测距原理!
今天咱们就先讲讲三角测距法激光雷达。
三角测距原理
典型的三角测距原理结构如下图:
激光器Laser以一定的角度beta射出一束激光,沿激光方向距离为d的物体反射激光。
接受激光的一般是个长条的CMOS(可以看成是一个长条形的摄像头),被物体反射的激光经过“小孔成像”被Imager(即CMOS)拍摄到。
焦距是f,物体离平面的垂直距离是q,激光器和焦点间的距离是s,过焦点平行于激光方向的虚线,它跟Imager的交点位置一般是预先知道的(确定好beta就知道了),物体激光反射后成像在Imager上的点位置离该处的距离为X。
从图中很容易看出来,q,d,beta组成的三角形跟X,f组成的三角形是相似三角形,于是有:f/X = q/s, 则 q = f*s/x
又由于 sin(beta) = q/d,于是 d = q/(sin(beta))
最后得到:d = f*s/(X*sin(beta))
因为f,s,beta都是预先可以已知的量,唯一需要测量的就是X,因此,测出X就测出了d,即得到物体离激光器的距离了。
从图中可以轻易的看出,如果d的距离变短了,则X就会变大,d变大了,X就变小。从Imager测出X只要计算出得到的光斑的中心即可获得距离X。
从单点变成激光器
上面讲解了如何根据三角测距原理进行单点测距,可是激光雷达是360°的,怎么才能变成激光雷达呢?将单点拿去旋转即可!
将激光器和成像器固定在一起,做成一个固定的装置,然后旋转,即可获得周围360°的扫描结果了。