FMCW即Frequency Modulated Continuous Wave,译为调频连续波。FMCW 雷达系统通过天线向外发射一列连续调频毫米波,并接收目标的反射信号。发射波的频率在时域中按调制电压的规律变化。FMCW 毫米波雷达的发射信号采用的是频率调制,常用的调制信号有:正弦波信号、锯齿波信号和三角波信号等,当以三角波或锯齿波作为调频波时,称其为线性调频连续波(LFMCW)。三角波线性调频连续波利用差拍傅立叶方式在一个周期内就可无模糊确定目标距离和速度,处理简单,易于实现,它利用发射信号的线性调频和从目标反射回来的接收信号频率的变化相关和频谱配对来进行动目标的测量,比较易于实现的测距测速连续波雷达,因此三角波线性调频连续波雷达的设计和实现,有着非常重要的现实意义。
1. FMCW雷达框图
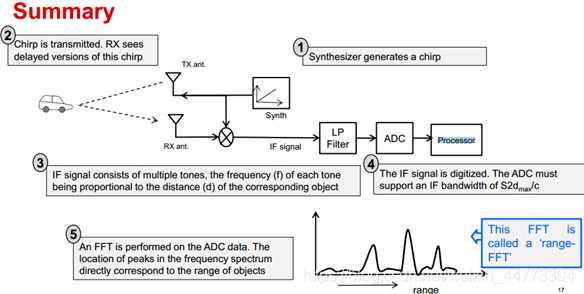
调频连续波雷达如要由收发器和带微处理器的控制单元组成,收发器如果使用单个天线进行同时发射和接收,FMCW雷达需要铁氧体环形器来分离发射和接收信号,对隔离度要求较高。当然,若使用收发分离的贴片天线,成本会相对低一点。
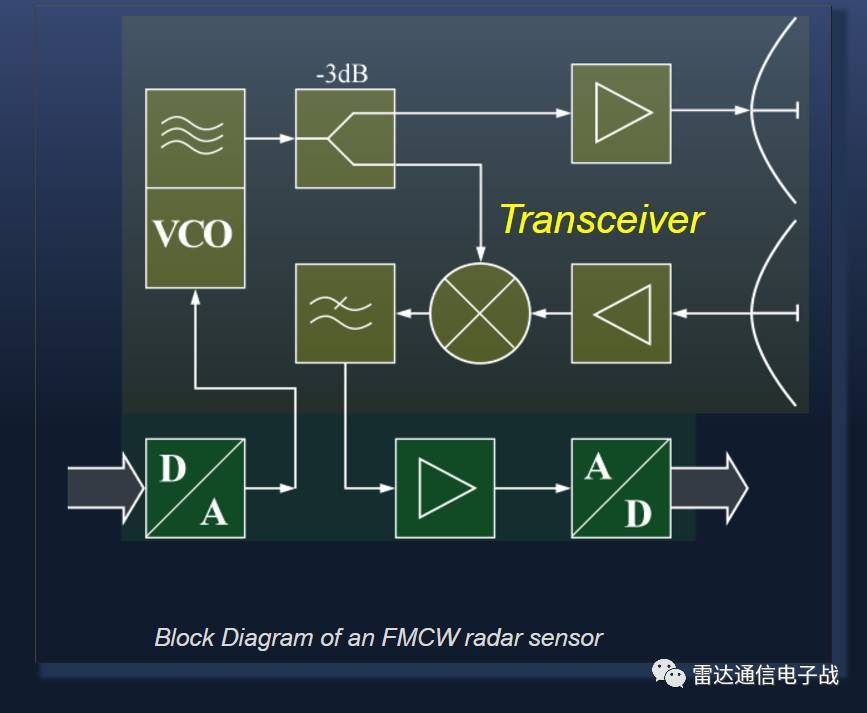
高频信号由压控振荡器(VCO)产生,通过功率分配器将一部分经过额外放大后馈送至发射天线,另一部分耦合至混频器,与接收的回波混频、低通滤波,得到基带差频信号,经过模数转换后送至微处理器处理。
2. FMCW雷达的测距/测速原理
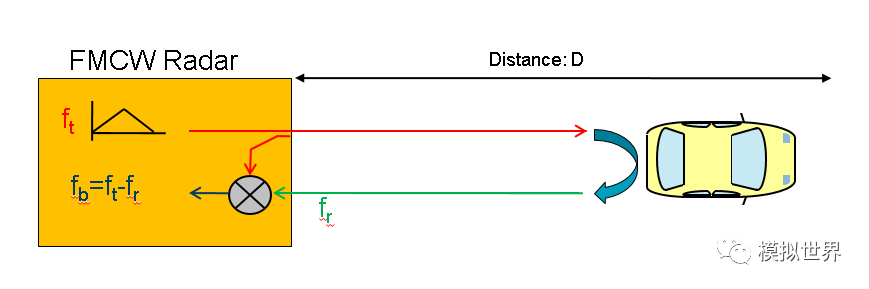
LFMCW 波雷达的工作原理是用回波信号和发射信号的一部分进行相干混频,得到包含目标的距离和速度信息的中频信号,然后对中频信号进行检测即可得到目标的距离和速度。当目标物体是相对静止的,发射信号碰到目标物体后被反射回来,产生回波信号,回波信号与发射信号形状相同,只是在时间上延迟了τ(τ=2R/c),式中:R-目标物体的距离;c-光速。
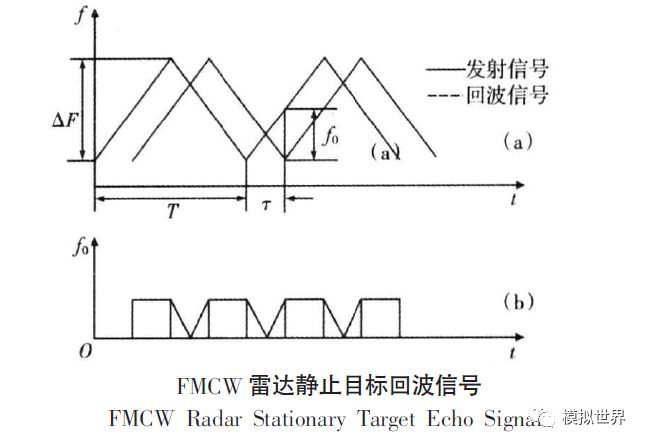
发射信号与回波信号的频率差即为混频输出的中频信号频率f0,根据相似三角形的关系,由上图(a)可以得出:
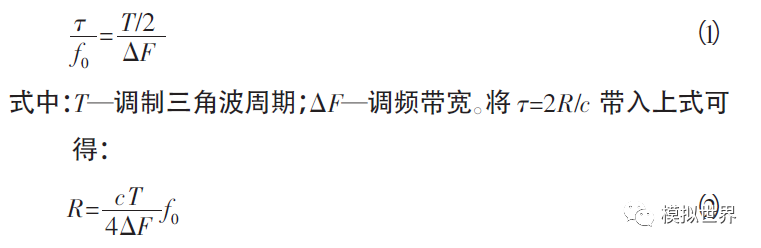
从上式中可以看出,在调制周期T 和调频带宽确定的情况下,目标距离与LFMCW 雷达前端混频器输出的中频信号频率成正比,这就是目标物体处于相对静止的情况下LFMCW 雷达测距原理。
从上式中可以看出,在调制周期T 和调频带宽确定的情况下,目标距离与LFMCW 雷达前端混频器输出的中频信号频率成正比,这就是目标物体处于相对静止的情况下LFMCW 雷达测距原理。
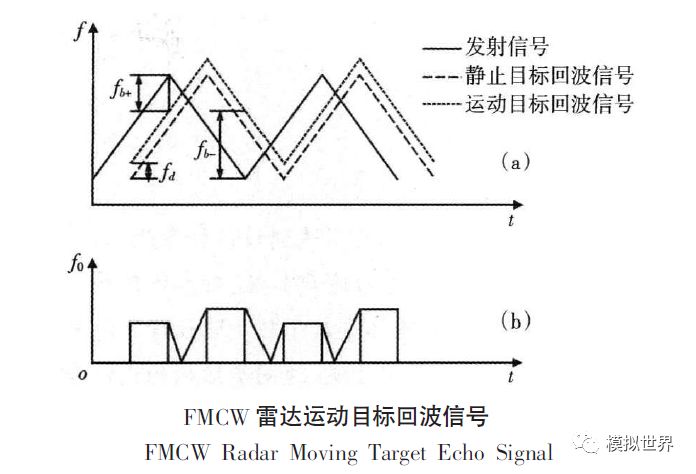
从上图中可以看出,三角波的上升沿和下降沿中频信号的频率可分别表示如下:
fb+=f0-fd
fb-=f0+fd
上两式中为目标物体相对静止时中频信号的频率,为多普勒频移。由距离公式R和多普勒频移公式可得:
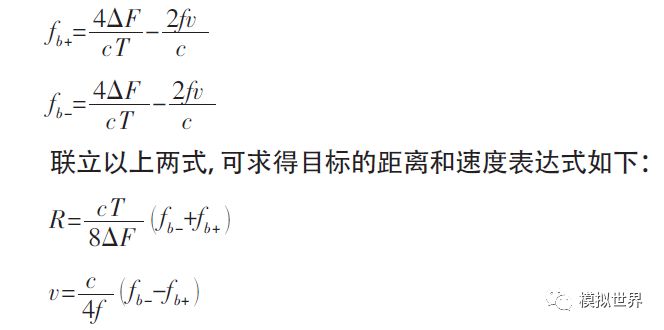
由上述公式可以看出,毫米波雷达信号中频频率fb的确定是求出R、V的关键。
以上两式虽然是在目标处于相对运动状态下推导出来的,但是对于相对静止的目标同样适用,因此,在实际应用中,不管目标是处于相对运动还是相对静止,只要分别求出调制三角波在上升沿和下降沿的中频信号的频率,就可以利用以上两式来计算目标的距离和速度信息,这就是FMCW 毫米波雷达测距测速原理。
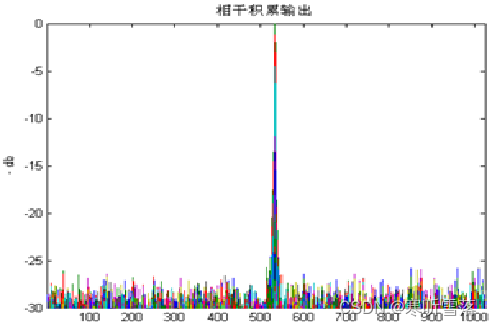
f的确定即是对发射和反射信号的频差进行频谱分析。信号的频谱分析主要有FFT法和非FFT法。所谓FFT法,即是对被分析的信号进行傅里叶变换,将其从时域变到频域,在频域进行分析,必要时再通过傅里叶逆变换,变回时域的分析方法。而非FFT方法则是通过其他的途径,获得信号的频率参数,如最大熵法、MUSIC法等,各有特点。综合考虑方法的复杂性,实时性,稳定性,对汽车雷达而言,频谱分析应首选FFT法,这种方法比较成熟,实现容易,实时性强,适合于汽车运行状况下信号的实时处理。
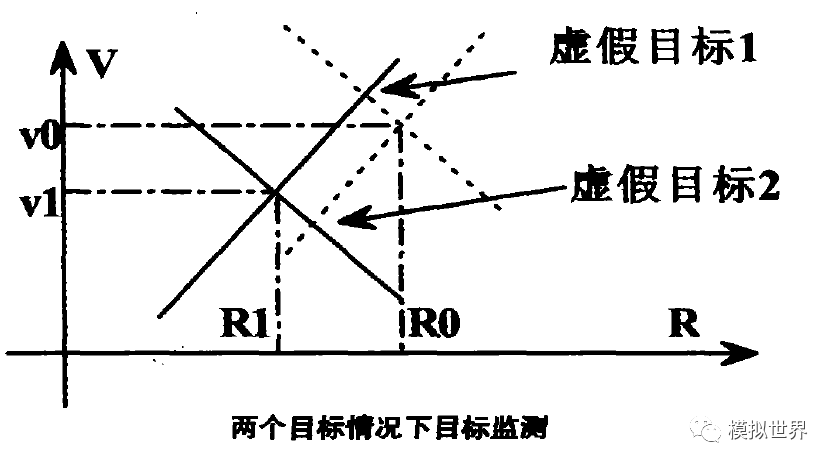
当雷达的辐射范围内有多个目标时,三角波调频方式雷达会产生一定的虚警率。
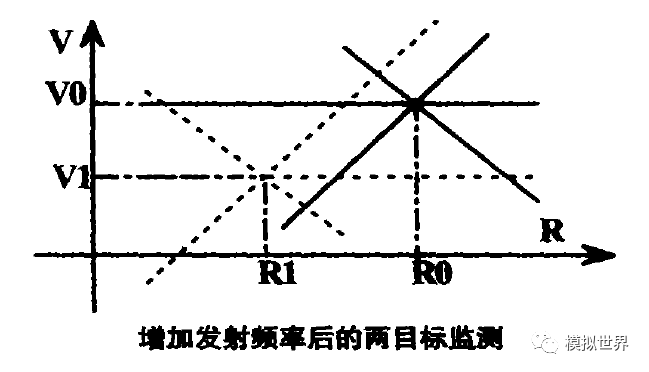
当前方为单目标时,由前面的公式,可以确定两个二元一次方程。在R—V平面内会确定两条斜率相反的直线,如下图中两条实线。从而获得一个交点,如下图中实线的交点,即可确定目标的相对速度和距离信息。而在多目标监测时则会产生虚警。以两个目标为例,由于雷达的参数相同(k。,k:相同),两个目标在发射信号处于频率上升和下降的频段会产生两组平行的直线,有四个交点,其中两个为虚警目标;如下图所指出,根据中频信号的信息无法排除。随着目标数量的增加,虚假目标会成倍的增长。因此,必须对雷达的发射波形进行调整,调整一方面应提高雷达的多目标分辨率,一方面要算法简便快捷,保证系统的实时性。波形调整的方法有很多种,至今也是毫米波汽车雷达应用的一个难点。这里仅对增加频率段方法的原理做一简单阐述。
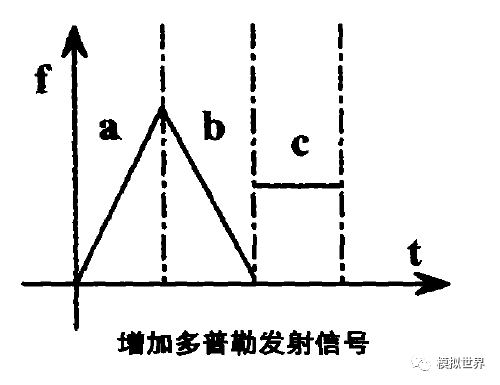
由于增加了和原有频率不同斜率的发射信号,如下图中的C段,则目标点在R--V平面内将获得另外一条直线,与原来两条直线交于一点,即为目标的信息点,如下图两目标检测中实线的交点。当遇到多目标时如果分属于不同的频率段的直线交于一点,则该点为真实目标点。以两目标点为例,如下图所示,三直线相交与一点,即为真实目标点,从而消除了一定的虚假目标。当然,增加的频率段越多,则可以消除的虚假目标也就越多。但是,每增加一个频率段就会增加系统的运算时间,为此频率段的增加和系统的实时性要有一定的折中。
随着CMOS高频器件和单片微波集成电路 MMIC的出现和应用,毫米波雷达的性能有了很大的提高,成本也有所下降,并且雷达的外型尺寸可以做得很小,便于在汽车上安装。因此,毫米波雷达就成了汽车前视雷达的首选。为了在高速公路上及时发现前方的交通堵塞,汽车用毫米波雷达的探测距离必须在100m以上;为了覆盖左右两侧的车道线,探测宽度必为3.5m;为了不把道路上方的标识和人行天桥也探测进去,上、下方要有与道路的升降相对应的3m左右的探测幅度。
参考文献
自动驾驶技术之——FMCW 雷达简介
调频连续波雷达(FMCW)测距/测速原理,看完这篇基本就懂了!