Canny边缘检测是一种非常流行的边缘检测算法,是John Canny在1986年提出的。它是一个多阶段的算法,即由多个步骤构成。
- 图像降噪
- 计算图像梯度
- 非极大值抑制
- 阈值筛选
原型
OpenCV-Python中Canny函数的原型为:
edge = cv2.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient ]]]) 必要参数:
- 第一个参数是需要处理的原图像,该图像必须为单通道的灰度图;
- 第二个参数是阈值1;
- 第三个参数是阈值2。
其中较大的阈值2用于检测图像中明显的边缘,但一般情况下检测的效果不会那么完美,边缘检测出来是断断续续的。所以这时候用较小的第一个阈值用于将这些间断的边缘连接起来。
可选参数中apertureSize就是Sobel算子的大小。而L2gradient参数是一个布尔值,如果为真,则使用更精确的L2范数进行计算(即两个方向的倒数的平方和再开放),否则使用L1范数(直接将两个方向导数的绝对值相加)。
具体的算法可参见清华大学出版社的《图像处理与计算机视觉算法及应用(第2版) 》第二章,其中有Canny算法的详细描述及实现。
函数返回一副二值图,其中包含检测出的边缘。
使用
Canny函数的使用很简单,只需指定最大和最小阈值即可。如下:
#coding=utf-8import cv2
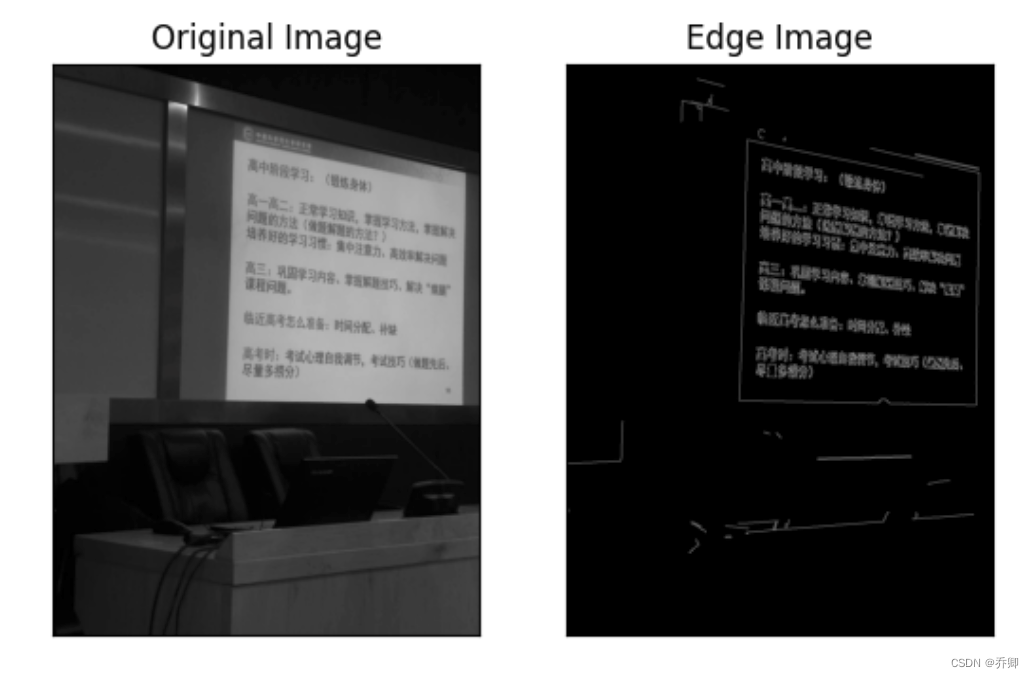
import numpy as np img = cv2.imread("D:/lion.jpg", 0) # 由于Canny只能处理灰度图,所以将读取的图像转成灰度图img = cv2.GaussianBlur(img,(3,3),0) # 用高斯平滑处理原图像降噪。若效果不好可调节高斯核大小canny = cv2.Canny(img, 50, 150) # 调用Canny函数,指定最大和最小阈值,其中apertureSize默认为3。cv2.imshow('Canny', canny)cv2.waitKey(0)cv2.destroyAllWindows()原图:

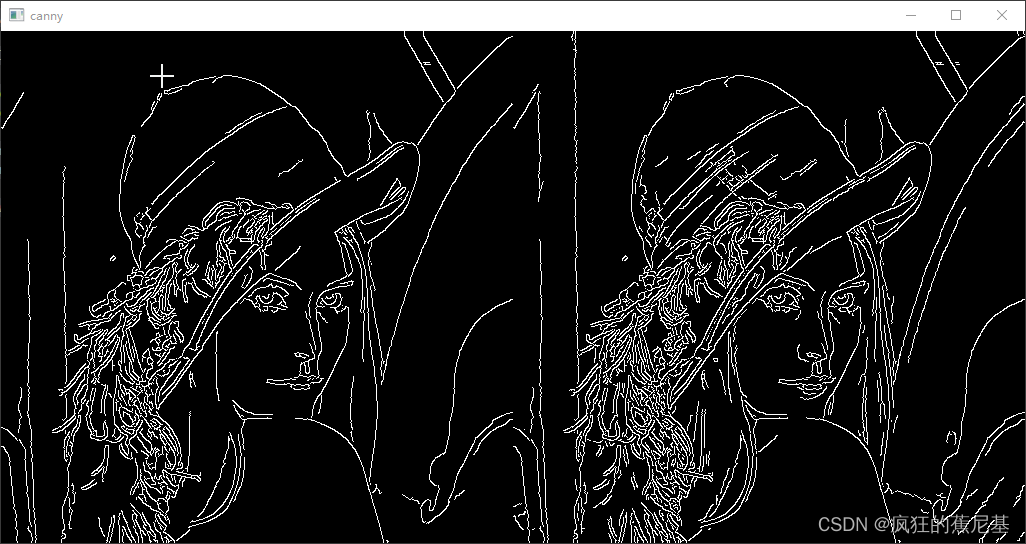
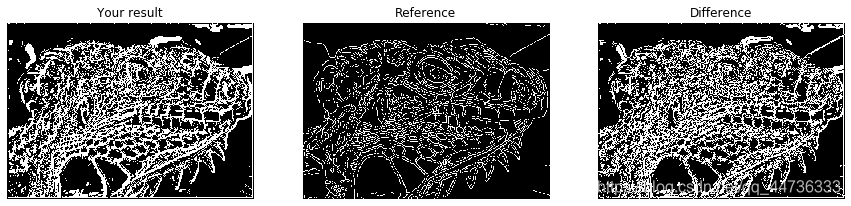
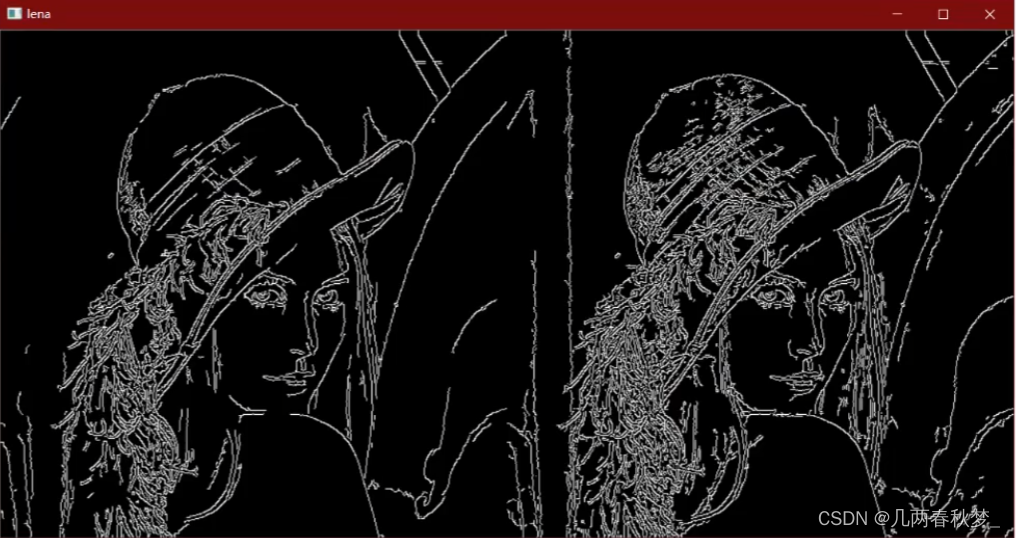
处理结果如下:
分别为高斯核为(1,1)和(3, 3)的效果图:


更多
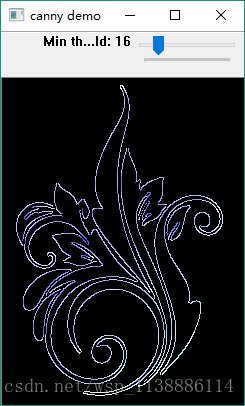
这个程序只是静态的,下面是可以在运行时调整阈值大小的程序。其代码如下:
import cv2
import numpy as npdef CannyThreshold(lowThreshold):detected_edges = cv2.GaussianBlur(gray,(3,3),0)detected_edges =cv2.Canny(detected_edges,lowThreshold,lowThreshold*ratio,apertureSize = kernel_size)dst = cv2.bitwise_and(img,img,mask = detected_edges) # just add some colours to edges from original image.cv2.imshow('canny demo',dst)lowThreshold = 0
max_lowThreshold = 100
ratio = 3
kernel_size = 3img = cv2.imread('D:/lion.jpg')
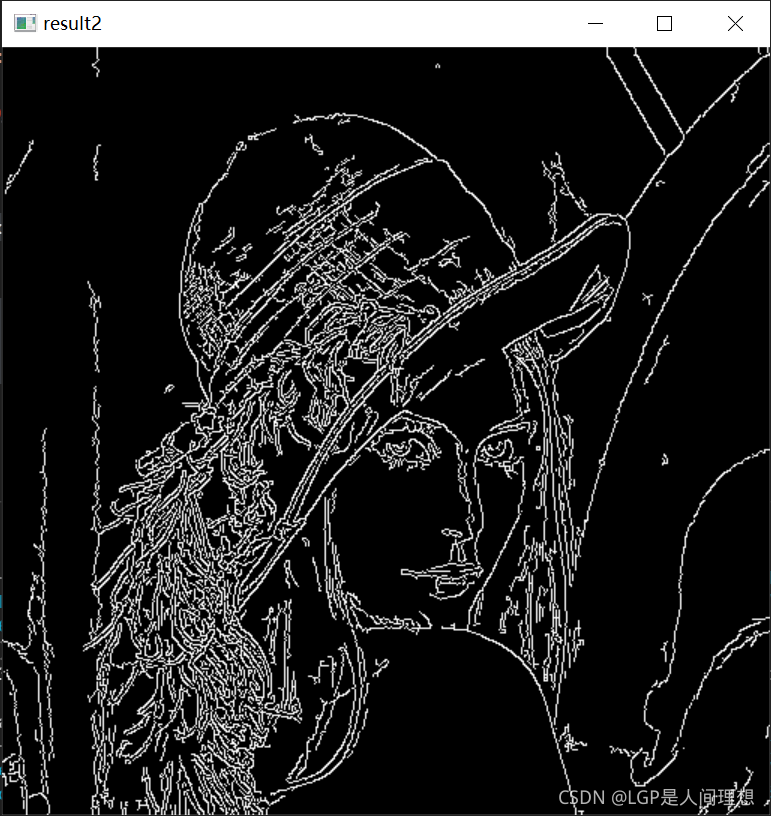
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)cv2.namedWindow('canny demo')cv2.createTrackbar('Min threshold','canny demo',lowThreshold, max_lowThreshold, CannyThreshold)CannyThreshold(0) # initializationif cv2.waitKey(0) == 27:cv2.destroyAllWindows()效果图如下: