目录
【1】边缘检测算法流程
【2】Canny算子介绍
【3】完整代码
【1】边缘检测算法流程
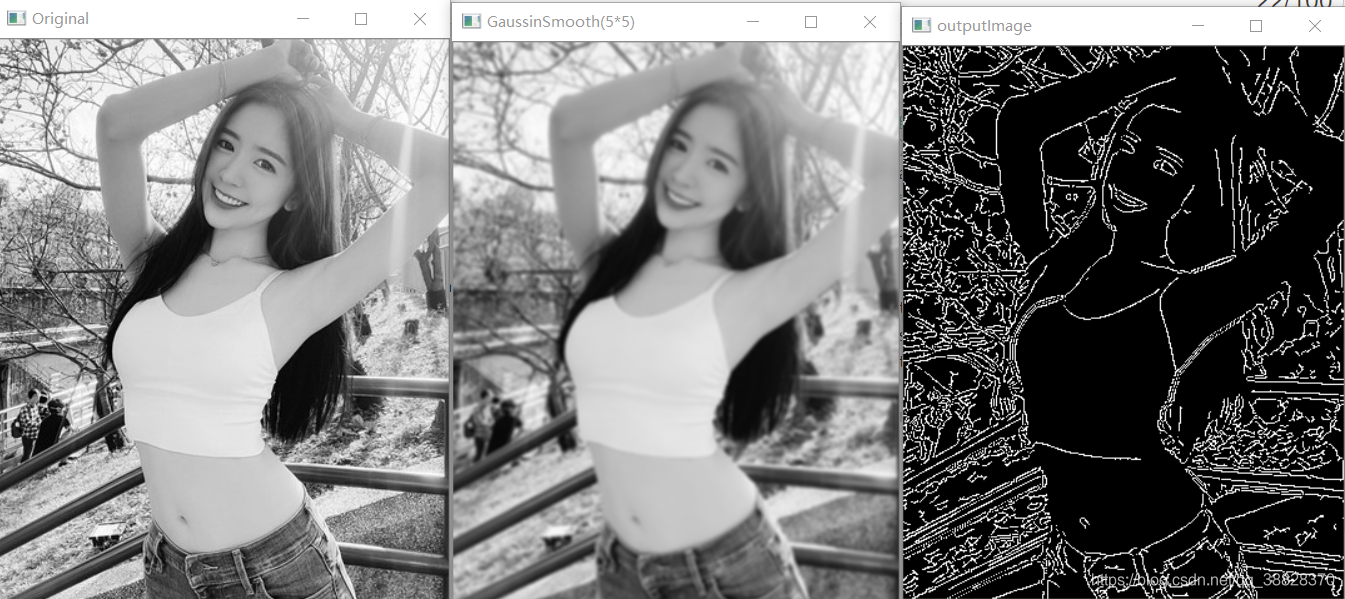
- 使用高斯滤波器来平滑图像,达到滤除噪声的效果。(降噪)
- 计算图像中每个像素点的梯度大小和方向(求梯度,与sobel算法求梯度一致)
- 使用非极大值抑制,消除边缘检测带来的不利影响(非极大抑制)
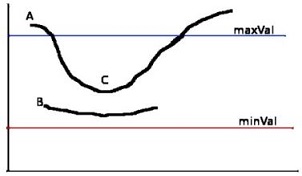
- 使用双域值法监测确定真实和潜在的边缘(双域值检测)
- 通过抑制孤立的弱边缘完成边缘检测(抑制弱边缘)
具体算法流程可以参考该文章:
https://zhuanlan.zhihu.com/p/494567705
【2】Canny算子介绍
void Canny( InputArray image, OutputArray edges,double threshold1, double threshold2,int apertureSize = 3, bool L2gradient = false );
具体参数介绍:
第一个参数,InputArray类型的image,输入图像,即源图像,填Mat类的对象即可,可以为三通道彩色图像,也可以是单通道的灰度图像。
第二个参数,OutputArray类型的edges,输出的边缘图,是单通道的边缘图像。
第三个参数,double类型的threshold1,第一个滞后性阈值。
第四个参数,double类型的threshold2,第二个滞后性阈值。
Canny采用俩个阈值,根据边缘响应的灰度图,大于高阈值的为强边缘,小于低阈值的为弱边缘,介于强弱边缘的值采用搜索算法。在8个领域内是否存在强边缘,如果存在强边缘,则该点就可以设置为强边缘。
第五个参数,int类型的apertureSize,表示应用Sobel算子的孔径大小,其有默认值3。
第六个参数,bool类型的L2gradient,一个计算图像梯度幅值的标识,有默认值false。
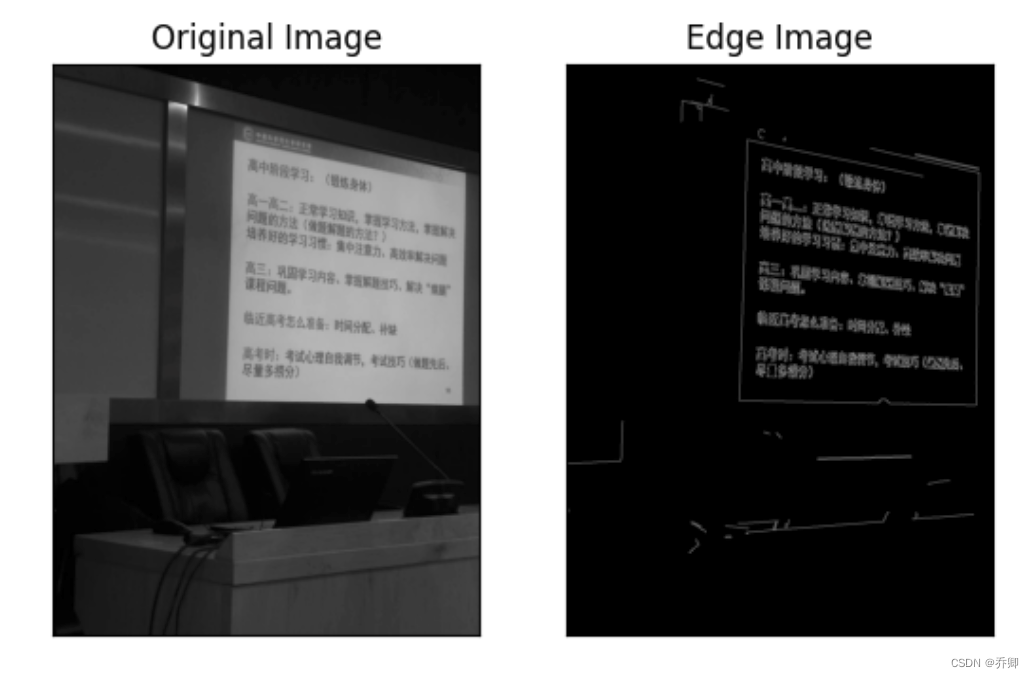
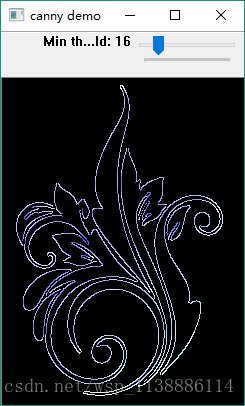
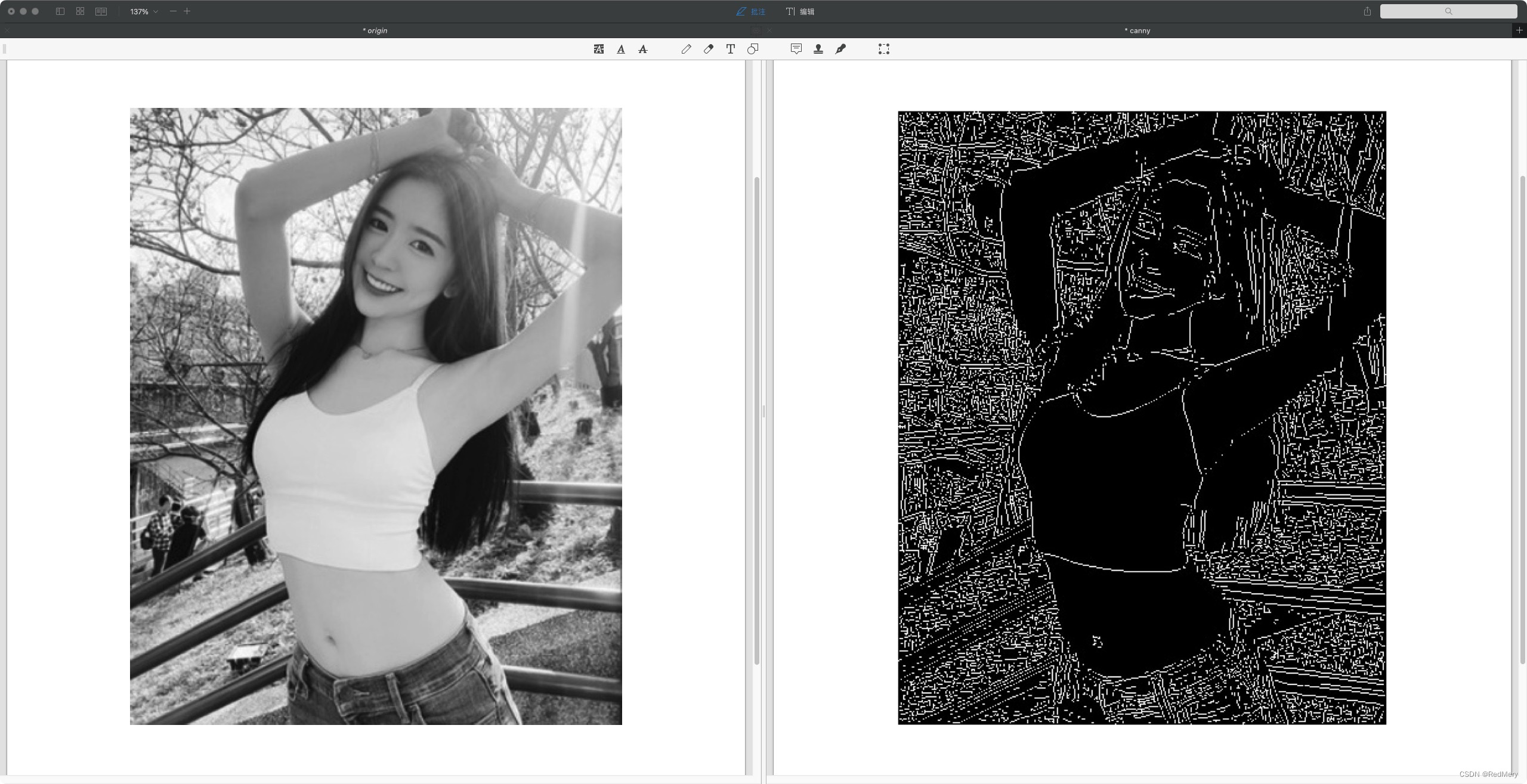
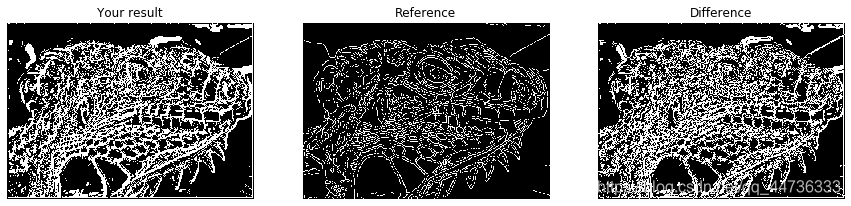
【3】完整代码
#include<opencv2\opencv.hpp>
#include<opencv2\imgproc\imgproc.hpp>
#include<opencv2\highgui\highgui.hpp>using namespace cv;
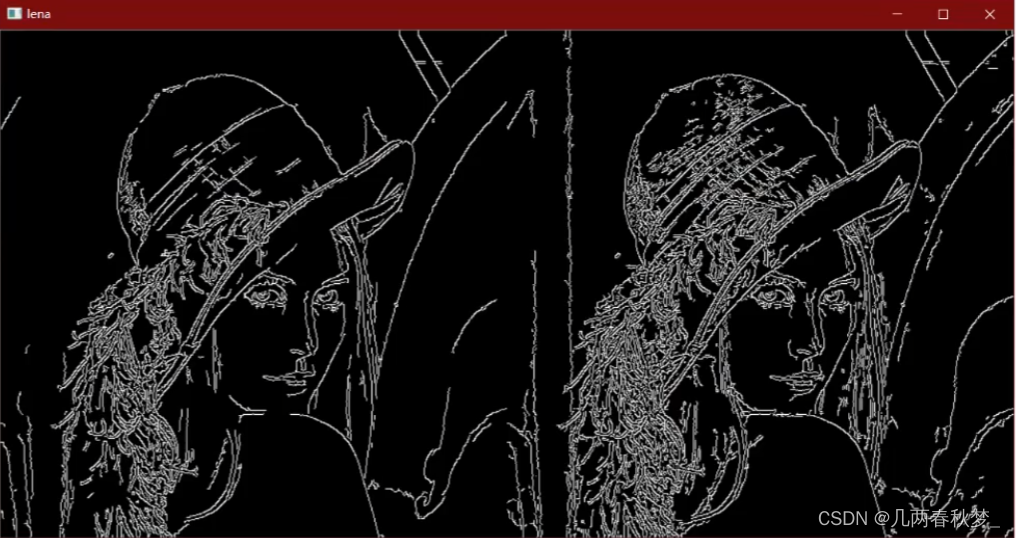
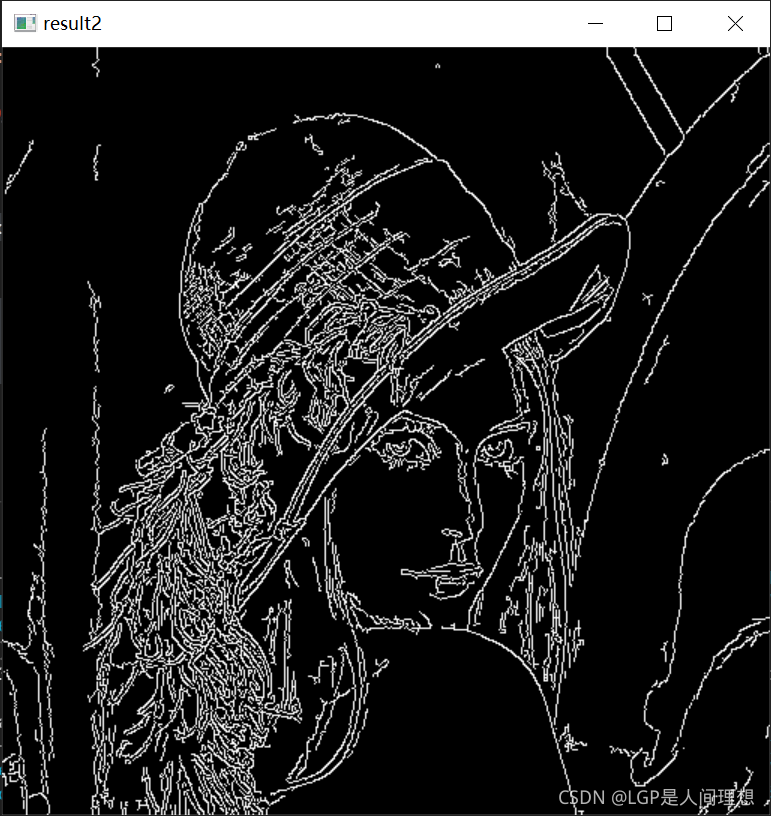
using namespace std;int main(int argc,char** argv)
{//载入原始图Mat src = imread("E:\\乔大花进度\\11-28\\边缘检测\\2.jpg");Mat src1 = src.clone();Mat src2(src.size(),CV_8UC1);//第一种直接使用边缘检测canny算法//blur(src2,src2,Size(3,3));Canny(src,src2,150,180);imshow("边缘检测1",src2);//第二种高阶边缘检测算法,转为灰度图,降噪,用Canny得到最后的边缘作为掩码,转到原图得到效果图,得到色彩的边缘图Mat dst, edge, gray;//【1】创建与src同类型和大小的矩阵(dst)dst.create(src1.size(),src1.type());//【2】将彩色图转为灰度图cvtColor(src1,gray,COLOR_BGR2GRAY);//【3】先使用3x3的内核用来降噪blur(gray,edge,Size(3,3));//【4】运行canny算法Canny(edge, edge, 3, 9);//【5】将dst中的像素都置为0dst = Scalar::all(0);//【6】与edge为掩码,将src2复制到dst中src1.copyTo(dst,edge);//【7】显示效果图imshow("边缘检测2",dst);//显示原始图imshow("原图",src);waitKey(0);system("pause");destroyAllWindows();return 0;}运行结果: