目录
一、边缘检测的步骤
二、最优边缘定义
三、Canny边缘检测算法步骤
1.对图像进行灰度化:
2.对图像进行高斯滤波:
3. 计算梯度幅值和方向
4.非极大值(Non-Maximum Suppression)抑制
5.用双阈值算法检测和连接边缘
代码实现(按复杂到简单依次实现):
方法一:
方法二:
方法三:
一、边缘检测的步骤
1)滤波: 边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,
因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。常见的滤波方法主要有高斯滤波、均值滤波等。
2)增强: 增强边缘的基础是确定图像各点邻域强度的变化值。增强算法可以将图像灰度点邻域
强度值有显著变化的点凸显出来。在具体编程实现时,可通过计算梯度幅值来确定。一般用sobel算子
3)检测: 经过增强的图像,往往邻域中有很多点的梯度值比较大,而在特定的应用中,这些
点并不是我们要找的边缘点,所以应该采用某种方法来对这些点进行取舍。实际工程中,常用
的方法是通过阈值化方法来检测。细化边缘(找到真正的边缘)
二、最优边缘定义
Canny是目前最优秀的边缘检测算法,其目标为找到一个最优的边缘,其最优边缘的定义为:
1、好的检测:算法能够尽可能的标出图像中的实际边缘
2、好的定位:标识出的边缘要与实际图像中的边缘尽可能接近
3、最小响应:图像中的边缘只能标记一次
三、Canny边缘检测算法步骤
1. 对图像进行灰度化
2. 对图像进行高斯滤波
3. 计算梯度幅值和方向(如使用Prewitt,Sobel算子等)
4 对梯度幅值进行非极大值抑制
5 用双阈值算法检测和连接边缘
1.对图像进行灰度化:
方法1:Gray=(R+G+B)/3;
方法2:Gray=0.299R+0.587G+0.114B
2.对图像进行高斯滤波:
为了尽可能减少噪声对边缘检测结果的影响,所以必须滤除噪声以防止由噪声引起的错误检测。为了平滑图像,使用高斯滤波器与图像进行卷积,该步骤将平滑图像,以减少边缘检测器上明显的噪声影响。大小为(2k+1)x(2k+1)的高斯滤波器核的生成方程式由下式给出:

下面是一个sigma = 1.4,尺寸为3x3的高斯卷积核的例子(需要注意归一化):
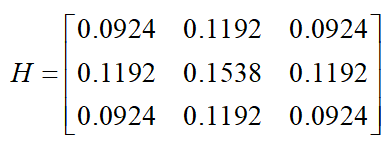
若图像中一个3x3的窗口为A,要滤波的像素点为e,则经过高斯滤波之后,像素点e的亮度值为:

其中*为卷积符号,sum表示矩阵中所有元素相加求和。
重要的是需要理解,高斯卷积核大小的选择将影响Canny检测器的性能。尺寸越大,检测器对噪声的敏感度越低,但是边缘检测的定位误差也将略有增加。一般5x5是一个比较不错的trade off。
3. 计算梯度幅值和方向
图像中的边缘可以指向各个方向,因此Canny算法使用四个算子来检测图像中的水平、垂直和对角边缘。边缘检测的算子(如Roberts,Prewitt,Sobel等)返回水平Gx和垂直Gy方向的一阶导数值,由此便可以确定像素点的梯度G和方向theta 。

其中G为梯度强度(幅值), theta表示梯度方向,arctan为反正切函数。下面以Sobel算子为例讲述如何计算梯度强度和方向。
x和y方向的Sobel算子分别为:
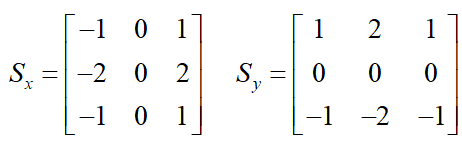
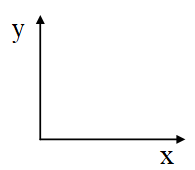
其中Sx表示x方向的Sobel算子,用于检测y方向的边缘; Sy表示y方向的Sobel算子,用于检测x方向的边缘(边缘方向和梯度方向垂直)。在直角坐标系中,Sobel算子的方向如下图所示。
若图像中一个3x3的窗口为A,要计算梯度的像素点为e,则和Sobel算子进行卷积之后,像素点e在x和y方向的梯度值分别为:
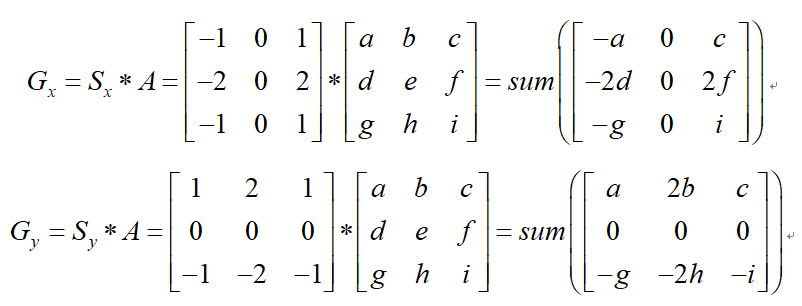
其中*为卷积符号,sum表示矩阵中所有元素相加求和。根据公式(3-2)便可以计算出像素点e的梯度和方向。
4.非极大值(Non-Maximum Suppression)抑制
非极大值抑制是一种边缘稀疏技术,非极大值抑制的作用在于“瘦”边。对图像进行梯度计算后,仅仅基于梯度值提取的边缘仍然很模糊。对于标准3,对边缘有且应当只有一个准确的响应。而非极大值抑制则可以帮助将局部最大值之外的所有梯度值抑制为0,对梯度图像中每个像素进行非极大值抑制的算法是:
- 将当前像素的梯度强度与沿正负梯度方向上的两个像素进行比较。
- 如果当前像素的梯度强度与另外两个像素相比最大,则该像素点保留为边缘点,否则该像素点将被抑制。
通常为了更加精确的计算,在跨越梯度方向的两个相邻像素之间使用线性插值来得到要比较的像素梯度,现举例如下:
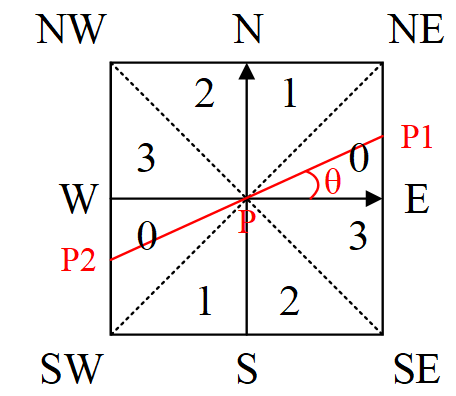
如图3-2所示,将梯度分为8个方向,分别为E、NE、N、NW、W、SW、S、SE,其中0代表045度,1代表4590度,2代表-90~ -45度,3代表-45~ 0度。像素点P的梯度方向为theta,则像素点P1和P2的梯度线性插值为:

因此非极大值抑制的伪代码描写如下:
需要注意的是,如何标志方向并不重要,重要的是梯度方向的计算要和梯度算子的选取保持一致。

5.用双阈值算法检测和连接边缘
要进行双阈值处理的原因:
完成非极大值抑制后,会得到一个以梯度局部极小值构成的图像,在图像上显示的就是有许多离散的点点,因此要把真正是边缘的点连接起来,同时去除孤立的噪声点。
思想:
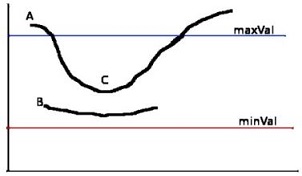
- 人工给定两个阈值,一个是低阈值TL,一个高阈值TH,
- 如果边缘像素的梯度值高于高阈值,则将其标记为强边缘像素,该位置的像素值置255;
- 如果边缘像素的梯度值小于高阈值并且大于低阈值,则将其标记为弱边缘像素;
- 如果边缘像素的梯度值小于低阈值,则会被抑制,该位置的像素值置0。
双阈值检测:
大于高阈值为强边缘,小于低阈值不是边缘。介于中间是弱边缘。
阈值的选择取决于给定输入图像的内容。
算法步骤:
1、选取系数TH和TL,比率为2:1或3:1。(一般取TH=0.3或0.2,TL=0.1);
2、将小于低阈值的点抛弃,赋0;将大于高阈值的点立即标记(这些点为确定边缘点),赋1或255;
3、将小于高阈值,大于低阈值的点使用8连通区域确定(即:只有与TH像素连接时才会被接受,成为边缘点,赋1或255)具体的,当强边缘的8邻域内有弱边缘像素,则将如边缘像素变成强边缘,赋值1或255,或者反过来理解,只要弱边缘的8邻域内有强边缘,则如边缘变成强边缘,赋值1或255
代码实现(按复杂到简单依次实现):
方法一:
# -*- coding: utf-8 -*-
"""
@author: 绯雨千叶Canny 边缘检测算法
"""
import numpy as np
import matplotlib.pyplot as plt
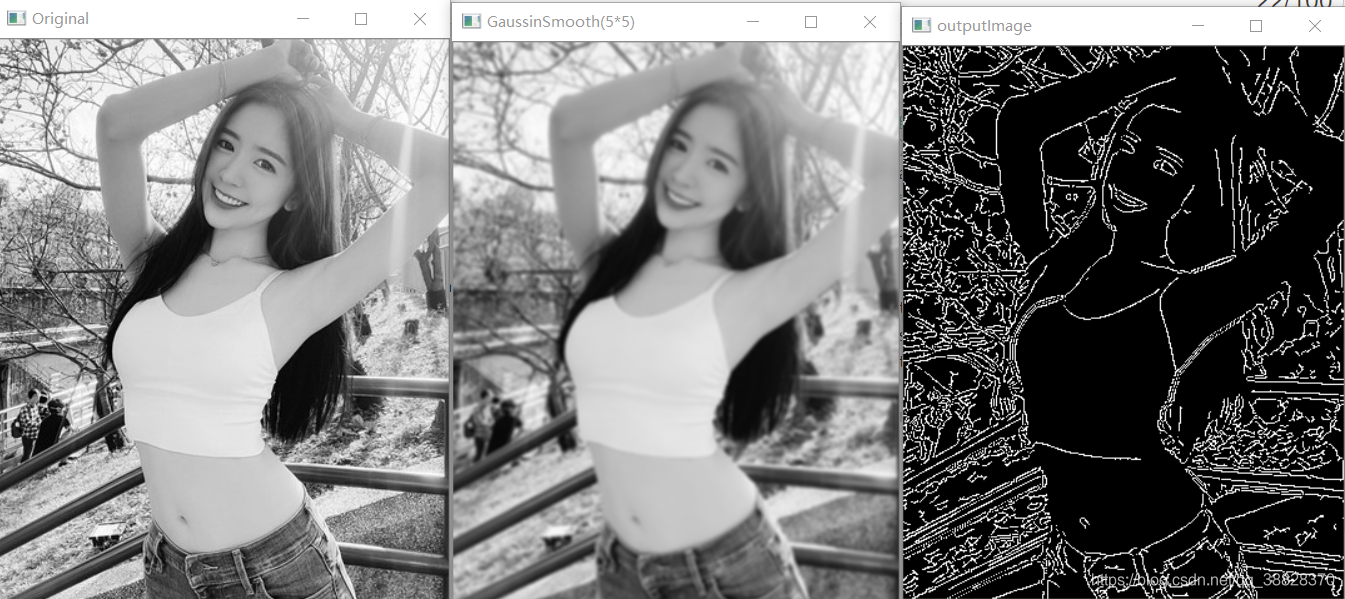
import mathif __name__ == '__main__':pic_path = '../img/lrn.jpg'img = plt.imread(pic_path)if pic_path[-4:] == '.png': # .png图片在这里的存储格式是0到1的浮点数,所以要扩展到255再计算img = img * 255 # 还是浮点数类型img = img.mean(axis=-1) # 取均值就是灰度化了# 1、高斯平滑# sigma = 1.52 # 高斯平滑时的高斯核参数,标准差,可调sigma = 0.5 # 高斯平滑时的高斯核参数,标准差,可调dim = int(np.round(6 * sigma + 1)) # round是四舍五入函数,根据标准差求高斯核是几乘几的,也就是维度if dim % 2 == 0: # 最好是奇数,不是的话加一dim += 1Gaussian_filter = np.zeros([dim, dim]) # 存储高斯核,这是数组不是列表了tmp = [i - dim // 2 for i in range(dim)] # 生成一个序列n1 = 1 / (2 * math.pi * sigma ** 2) # 计算高斯核n2 = -1 / (2 * sigma ** 2)for i in range(dim):for j in range(dim):Gaussian_filter[i, j] = n1 * math.exp(n2 * (tmp[i] ** 2 + tmp[j] ** 2))Gaussian_filter = Gaussian_filter / Gaussian_filter.sum()dx, dy = img.shapeimg_new = np.zeros(img.shape) # 存储平滑之后的图像,zeros函数得到的是浮点型数据tmp = dim // 2img_pad = np.pad(img, ((tmp, tmp), (tmp, tmp)), 'constant') # 边缘填补for i in range(dx):for j in range(dy):img_new[i, j] = np.sum(img_pad[i:i + dim, j:j + dim] * Gaussian_filter)plt.figure(1)plt.subplot(221)plt.imshow(img_new.astype(np.uint8), cmap='gray') # 此时的img_new是255的浮点型数据,强制类型转换才可以,gray灰阶plt.axis('off')# 2、求梯度。以下两个是滤波求梯度用的sobel矩阵(检测图像中的水平、垂直和对角边缘)sobel_kernel_x = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]])sobel_kernel_y = np.array([[1, 2, 1], [0, 0, 0], [-1, -2, -1]])img_tidu_x = np.zeros(img_new.shape) # 存储梯度图像img_tidu_y = np.zeros([dx, dy])img_tidu = np.zeros(img_new.shape)img_pad = np.pad(img_new, ((1, 1), (1, 1)), 'constant') # 边缘填补,根据上面矩阵结构所以写1for i in range(dx):for j in range(dy):img_tidu_x[i, j] = np.sum(img_pad[i:i + 3, j:j + 3] * sobel_kernel_x) # x方向img_tidu_y[i, j] = np.sum(img_pad[i:i + 3, j:j + 3] * sobel_kernel_y) # y方向img_tidu[i, j] = np.sqrt(img_tidu_x[i, j] ** 2 + img_tidu_y[i, j] ** 2)img_tidu_x[img_tidu_x == 0] = 0.00000001angle = img_tidu_y / img_tidu_xplt.subplot(222)plt.imshow(img_tidu.astype(np.uint8), cmap='gray')plt.axis('off')# 3、非极大值抑制img_yizhi = np.zeros(img_tidu.shape)for i in range(1, dx - 1):for j in range(1, dy - 1):flag = True # 在8邻域内是否要抹去做个标记temp = img_tidu[i - 1:i + 2, j - 1:j + 2] # 梯度幅值的8邻域矩阵if angle[i, j] <= -1: # 使用线性插值法判断抑制与否num_1 = (temp[0, 1] - temp[0, 0]) / angle[i, j] + temp[0, 1]num_2 = (temp[2, 1] - temp[2, 2]) / angle[i, j] + temp[2, 1]if not (img_tidu[i, j] > num_1 and img_tidu[i, j] > num_2):flag = Falseelif angle[i, j] >= 1:num_1 = (temp[0, 2] - temp[0, 1]) / angle[i, j] + temp[0, 1]num_2 = (temp[2, 0] - temp[2, 1]) / angle[i, j] + temp[2, 1]if not (img_tidu[i, j] > num_1 and img_tidu[i, j] > num_2):flag = Falseelif angle[i, j] > 0:num_1 = (temp[0, 2] - temp[1, 2]) * angle[i, j] + temp[1, 2]num_2 = (temp[2, 0] - temp[1, 0]) * angle[i, j] + temp[1, 0]if not (img_tidu[i, j] > num_1 and img_tidu[i, j] > num_2):flag = Falseelif angle[i, j] < 0:num_1 = (temp[1, 0] - temp[0, 0]) * angle[i, j] + temp[1, 0]num_2 = (temp[1, 2] - temp[2, 2]) * angle[i, j] + temp[1, 2]if not (img_tidu[i, j] > num_1 and img_tidu[i, j] > num_2):flag = Falseif flag:img_yizhi[i, j] = img_tidu[i, j]plt.subplot(223)plt.imshow(img_yizhi.astype(np.uint8), cmap='gray')plt.axis('off')# 4、双阈值检测,连接边缘。遍历所有一定是边的点,查看8邻域是否存在有可能是边的点,进栈lower_boundary = img_tidu.mean() * 0.5high_boundary = lower_boundary * 3 # 这里我设置高阈值是低阈值的三倍zhan = []for i in range(1, img_yizhi.shape[0] - 1): # 外圈不考虑了for j in range(1, img_yizhi.shape[1] - 1):if img_yizhi[i, j] >= high_boundary: # 取,一定是边的点img_yizhi[i, j] = 255zhan.append([i, j])elif img_yizhi[i, j] <= lower_boundary: # 舍img_yizhi[i, j] = 0while not len(zhan) == 0:temp_1, temp_2 = zhan.pop() # 出栈a = img_yizhi[temp_1 - 1:temp_1 + 2, temp_2 - 1:temp_2 + 2]if (a[0, 0] < high_boundary) and (a[0, 0] > lower_boundary):img_yizhi[temp_1 - 1, temp_2 - 1] = 255 # 这个像素点标记为边缘zhan.append([temp_1 - 1, temp_2 - 1]) # 进栈if (a[0, 1] < high_boundary) and (a[0, 1] > lower_boundary):img_yizhi[temp_1 - 1, temp_2] = 255zhan.append([temp_1 - 1, temp_2])if (a[0, 2] < high_boundary) and (a[0, 2] > lower_boundary):img_yizhi[temp_1 - 1, temp_2 + 1] = 255zhan.append([temp_1 - 1, temp_2 + 1])if (a[1, 0] < high_boundary) and (a[1, 0] > lower_boundary):img_yizhi[temp_1, temp_2 - 1] = 255zhan.append([temp_1, temp_2 - 1])if (a[1, 2] < high_boundary) and (a[1, 2] > lower_boundary):img_yizhi[temp_1, temp_2 + 1] = 255zhan.append([temp_1, temp_2 + 1])if (a[2, 0] < high_boundary) and (a[2, 0] > lower_boundary):img_yizhi[temp_1 + 1, temp_2 - 1] = 255zhan.append([temp_1 + 1, temp_2 - 1])if (a[2, 1] < high_boundary) and (a[2, 1] > lower_boundary):img_yizhi[temp_1 + 1, temp_2] = 255zhan.append([temp_1 + 1, temp_2])if (a[2, 2] < high_boundary) and (a[2, 2] > lower_boundary):img_yizhi[temp_1 + 1, temp_2 + 1] = 255zhan.append([temp_1 + 1, temp_2 + 1])for i in range(img_yizhi.shape[0]):for j in range(img_yizhi.shape[1]):if img_yizhi[i, j] != 0 and img_yizhi[i, j] != 255:img_yizhi[i, j] = 0# 绘图plt.subplot(224)plt.imshow(img_yizhi.astype(np.uint8), cmap='gray')plt.axis('off') # 关闭坐标刻度值plt.show()效果展示:

方法二:
#!/usr/bin/env python
# encoding=gbk
"""
@author: 绯雨千叶Canny边缘检测:优化的程序
"""
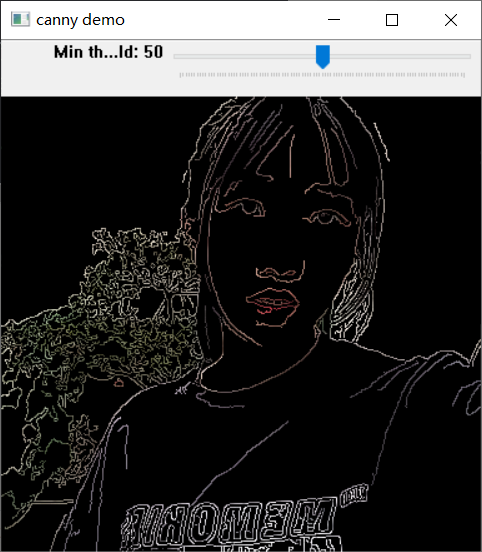
import cv2def CannyThreshold(lowThreshold): detected_edges = cv2.GaussianBlur(gray, (3, 3), 0) # 高斯滤波detected_edges = cv2.Canny(detected_edges,lowThreshold,lowThreshold*ratio,apertureSize = kernel_size) # 边缘检测dst = cv2.bitwise_and(img,img,mask = detected_edges) # 用原始颜色添加到检测的边缘上cv2.imshow('canny demo', dst)lowThreshold = 0
max_lowThreshold = 100
ratio = 3
kernel_size = 3 img = cv2.imread('../img/lrn.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) # 转换彩色图像为灰度图
cv2.namedWindow('canny demo') #设置调节杠
'''
下面是第二个函数,cv2.createTrackbar()
共有5个参数,其实这五个参数看变量名就大概能知道是什么意思了
第一个参数,是这个trackbar对象的名字
第二个参数,是这个trackbar对象所在面板的名字
第三个参数,是这个trackbar的默认值,也是调节的对象
第四个参数,是这个trackbar上调节的范围(0~count)
第五个参数,是调节trackbar时调用的回调函数名
'''
cv2.createTrackbar('Min threshold','canny demo',lowThreshold, max_lowThreshold, CannyThreshold) CannyThreshold(0) # initialization
if cv2.waitKey(0) == 27: # 按esc退出cv2.destroyAllWindows()
效果展示:
方法三:
#!/usr/bin/env python
# encoding=gbk
"""
@author: 绯雨千叶Canny边缘检测:二次优化的程序
"""
import cv2'''
cv2.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient ]]])
必要参数:
第一个参数是需要处理的原图像,该图像必须为单通道的灰度图;
第二个参数是滞后阈值1;
第三个参数是滞后阈值2。
'''
img = cv2.imread("../img/lrn.jpg", 1)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
cv2.imshow("canny", cv2.Canny(gray, 200, 300))
cv2.waitKey(0)效果展示: