快慢指针
快慢指针中的快慢指的是移动的步长,即每次向前移动速度的快慢。例如可以让快指针每次沿链表向前移动2,慢指针每次向前移动1次。
快慢指针的应用
(1)判断单链表是否存在环
如果链表存在环,就好像操场的跑道是一个环形一样。此时让快慢指针都从链表头开始遍历,快指针每次向前移动两个位置,慢指针每次向前移动一个位置;如果快指针到达NULL,说明链表以NULL为结尾,没有环。如果快指针追上慢指针,则表示有环。代码如下:
bool HasCircle(Node *head)
{if(head == NULL)return false;Node *slow = head, *fast = head;while(fast != NULL && fast->next!=NULL){slow = slow->next; //慢指针每次前进一步fast = fast->next->next;//快指针每次前进两步if(slow == fast) //相遇,存在环return true;}return false;
}(2)在有序链表中寻找中位数
快指针的移动速度是慢指针移动速度的2倍,因此当快指针到达链表尾时,慢指针到达中点。
程序还要考虑链表结点个数的奇偶数因素,当快指针移动x次后到达表尾(1+2x),说明链表有奇数个结点,直接返回慢指针指向的数据即可。
如果快指针是倒数第二个结点,说明链表结点个数是偶数,这时可以根据“规则”返回上中位数或下中位数或(上中位数+下中位数)的一半。
while (fast && slow)
{if (fast->next==NULL)return slow ->data;else if (fast->next!= NULL && fast->next->next== NULL)return (slow ->data + slow ->next->data)/2;else{fast= fast->next;fast= fast->next;slow = slow ->next;}}(3) 输出链表中的倒数第K个节点(即正数第K-1个节点)
可以定义两个指针,第一个指针从链表的头指针开始遍历向前走k-1步,第二个指针保持不动;从第K步开始,第二个指针也开始从链表的头指针开始遍历。由于两个指针的距离保持在k-1,当第一个指针到达链表的尾节点时候,第二个指针正好是倒数第K个节点,代码如下:
// 查找单链表中倒数第K个结点
ListNode * RGetKthNode(ListNode * pHead, unsigned int k) // 函数名前面的R代表反向
{ if(k == 0 || pHead == NULL) // 这里k的计数是从1开始的,若k为0或链表为空返回NULL return NULL; ListNode * pAhead = pHead; ListNode * pBehind = pHead; for(int i=0;i<k-1;i++){ pAhead=pAhead->next; if(pAhead==null) return null;//当链表长度小于k时候,返回Null } while(pAhead->next != NULL) // 前后两个指针一起向前走,直到前面的指针指向最后一个结点 { pBehind = pBehind->next; pAhead = pAhead->next; } return pBehind; // 后面的指针所指结点就是倒数第k个结点
} (4) 判断链表是否存在环,如果存在,找到环入口
有一个单链表,其中可能有一个环,也就是某个节点的next指向的是链表中在它之前的节点,这样在链表的尾部形成一环。
如何判断一个链表是否存在环?设定两个指针slow,fast,均从头指针开始,每次分别前进1步、2步。如存在环,则两者相遇;如不存在环,fast遇到NULL退出。
如果链表存在环,如果找到环的入口点?当fast若与slow相遇时,slow肯定没有走遍历完链表或者恰好遍历一圈。于是我们从链表头与相遇点分别设一个指针,每次各走一步,两个指针必定相遇,且相遇第一点为环入口点。
node* findLoopPort(node *head) {node *fast, *slow;fast = slow = head;while (fast && fast->next) {
//第一步:判断链表是否存在环slow = slow->next;fast = fast->next->next;if (slow == fast) { //链表存在环break;}}if ((fast == NULL) || (fast->next == NULL)) { //链表不存在环return NULL;}
//第二步:寻找环的入口点slow = head; //让slow回到链表的起点,fast留在相遇点while (slow != fast) { //当slow和fast再次相遇时,那个点就是环的入口点slow = slow->next;fast = fast->next;}return slow;
}(5) 判断两个单链表是否相交,如果相交,找到他们的第一个公共节点
判断两个单链表是否相交,如果相交,给出相交的第一个点(假设两个链表都不存在环)。
思路:
首先利用快慢指针判断链表是否存在环。
(1)如果都不存在环,则如果两个单向链表有公共节点,也就是两个链表从某一节点开始,他们的p_next都指向同一个节点,每个节点只有一个p->next。因此从第一个公共节点开始,之后它们所有节点都是重合的。因此,首先两个链表各遍历一次,求出两个链表的长度L1、L2,然后可以得到它们的长度差L。然后现在长的链表上遍历L个节点,之后再同步遍历,于是在遍历中,第一个相同的节点就是第一个公共的节点。此时,若两个链表长度分别为M,N,则时间复杂度为O(M+N).
(2)如果一个存在环,另外一个不存在环,则这两个链表是不可能相交的。
(3)如果利用快慢指针发现两个链表都存在环,则判断任意一个链表上快慢指针相遇的那个节点,在不在另外一个链表上,如果在,则相交,不在,则不相交。
下面讨论两个没有环的链表如果是相交于某一结点的情况:
相交的链表示意图如下所示:
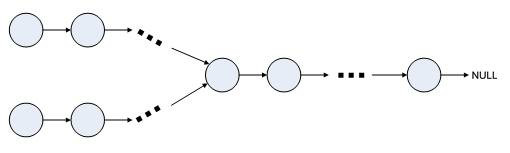
方法一:
两个没有环的链表如果是相交于某一结点,如上图所示,这个结点后面都是共有的。所以如果两个链表相交,那么两个链表的尾结点的地址也是一样的。程序实现时分别遍历两个单链表,直到尾结点。判断尾结点地址是否相等即可。时间复杂度为O(L1+L2)。
如何找到第一个相交结点?判断是否相交的时候,记录下两个链表的长度,算出长度差len,接着先让较长的链表遍历len个长度,然后两个链表同时遍历,判断是否相等,如果相等,就是第一个相交的结点。
void Is_2List_Intersect(LinkList L1, LinkList L2) {if (L1 == NULL || L2 == NULL) {exit(ERROR);}LinkList p = L1;LinkList q = L2;int L1_length = 0;int L2_length = 0;int len = 0;while (p->next) {L1_length ++;p = p->next;}while (q->next) {L2_length ++;q = q->next;}printf("p: = %d\n", p);printf("q: = %d\n", q);printf("L1_length: = %d\n", L1_length);printf("L2_length: = %d\n", L2_length);if (p == q) {printf(" 相交\n");/*p重新指向短的链表 q指向长链表*/if (L1_length > L2_length) {len = L1_length - L2_length;p = L2;q = L1;}else {len = L2_length - L1_length;p = L1;q = L2;}while (len) {q = q->next;len--;}while (p != q) {p = p->next;q = q->next;}printf("相交的第一个结点是:%d\n", p->data );}else {printf("不相交 \n");}}方法二:
另外一个方法则是将一个链表首尾相接,然后判断另外一个链表是否有环,如果有环,则两个链表相交。那么求第一个交点则求出有环的的那个链表的环结点即是。
int Is_ListLoop(LinkList L) {LinkList fast, slow;if (L == NULL || L->next == NULL) {exit(ERROR);}fast = slow = L;while (fast->next != NULL && fast->next->next != NULL) {slow = slow->next;fast = fast->next->next;if (fast == slow) {return True;}}return False;
}int Find_Loop(LinkList L) {LinkList fast, slow;if (L == NULL || L->next == NULL) {exit(ERROR);}fast = slow = L;while (fast->next != NULL && fast->next->next != NULL) {slow = slow->next;fast = fast->next->next;if (fast == slow) {break;}}slow = L;while (fast != slow) {slow = slow->next;fast = fast->next;}printf("%d\n", slow->data );return TRUE;}void Is_2List_Intersect2(LinkList L1, LinkList L2) {if (L1 == NULL || L2 == NULL) {exit(ERROR);}LinkList p = L1;LinkList q = L2;while (p->next) {p = p->next;}p->next = L1->next;if(Is_ListLoop(L2)){printf("相交\n");printf("相交的第一个结点是:");Find_Loop(L2);}else{printf("不相交\n");}
}参考链接:
https://blog.csdn.net/a1091220321/article/details/47706711
https://www.cnblogs.com/hxsyl/p/4395794.html
https://blog.csdn.net/zwhlxl/article/details/45745825