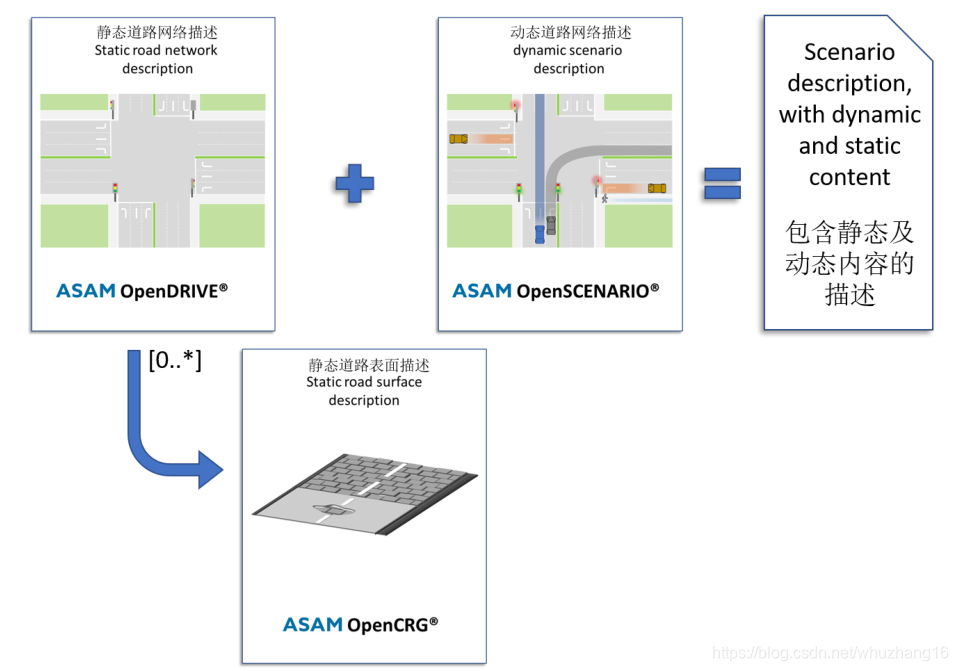
几种坐标系简述
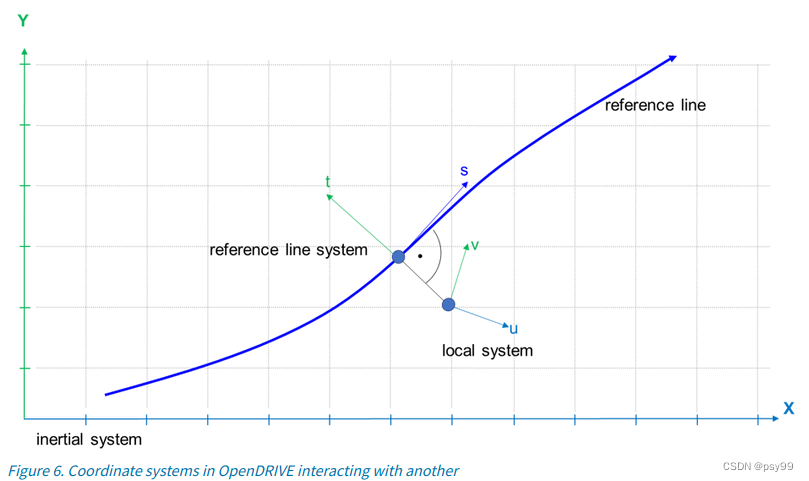
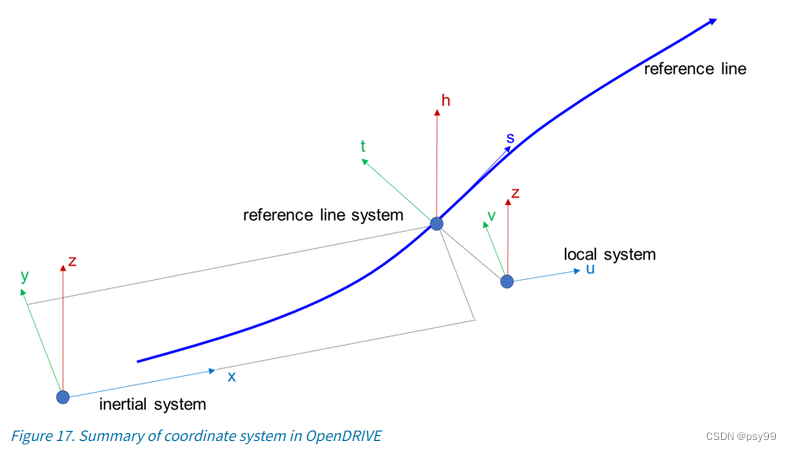
opendrive标准主要包括三种坐标系:inertial(x, y, z)、reference line(s, t, h)、local(u, v, z)
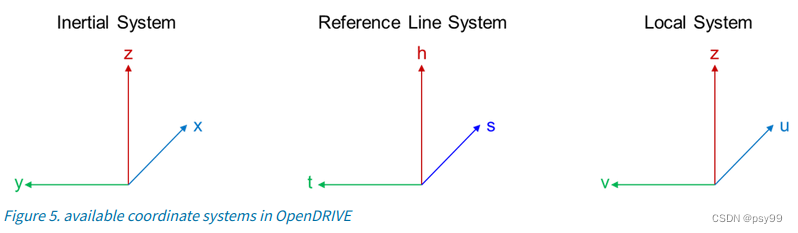
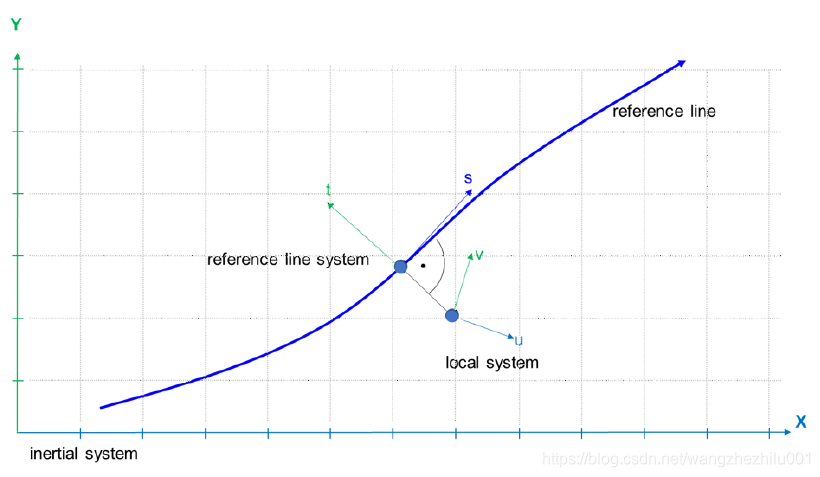
下面这张图片笔者认为还是比较清晰的展示了三种坐标系的关系的:
惯性坐标系(Inertial)
惯性坐标系最简单,可以简单的立即为:x代表east,y代表north,z代表up。
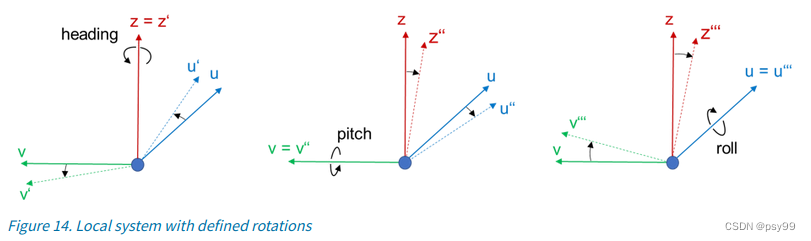
官方文档中同时提出了heading、pitch、roll的概念,分别对应着xyz三个方向的旋转,如下图所示:
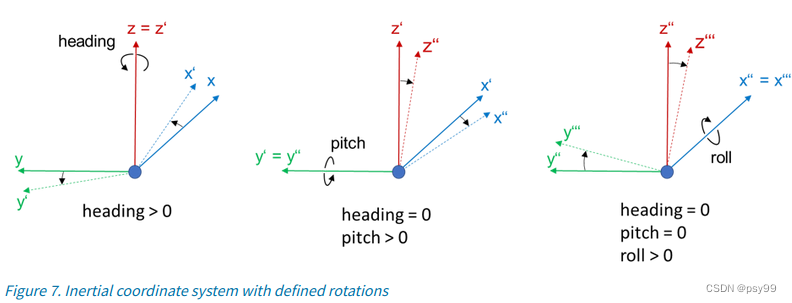
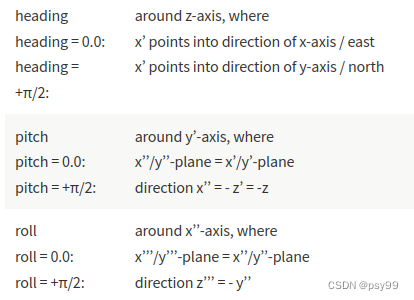
理解的时候可以参考下面这个表,作为对照。惯性坐标系是最简单的坐标系,很好理解。
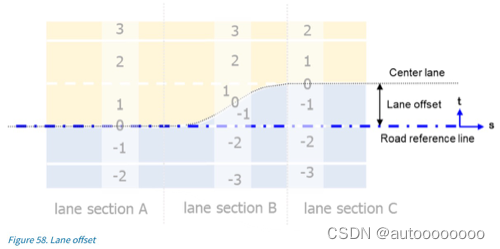
参考线坐标系(Reference)
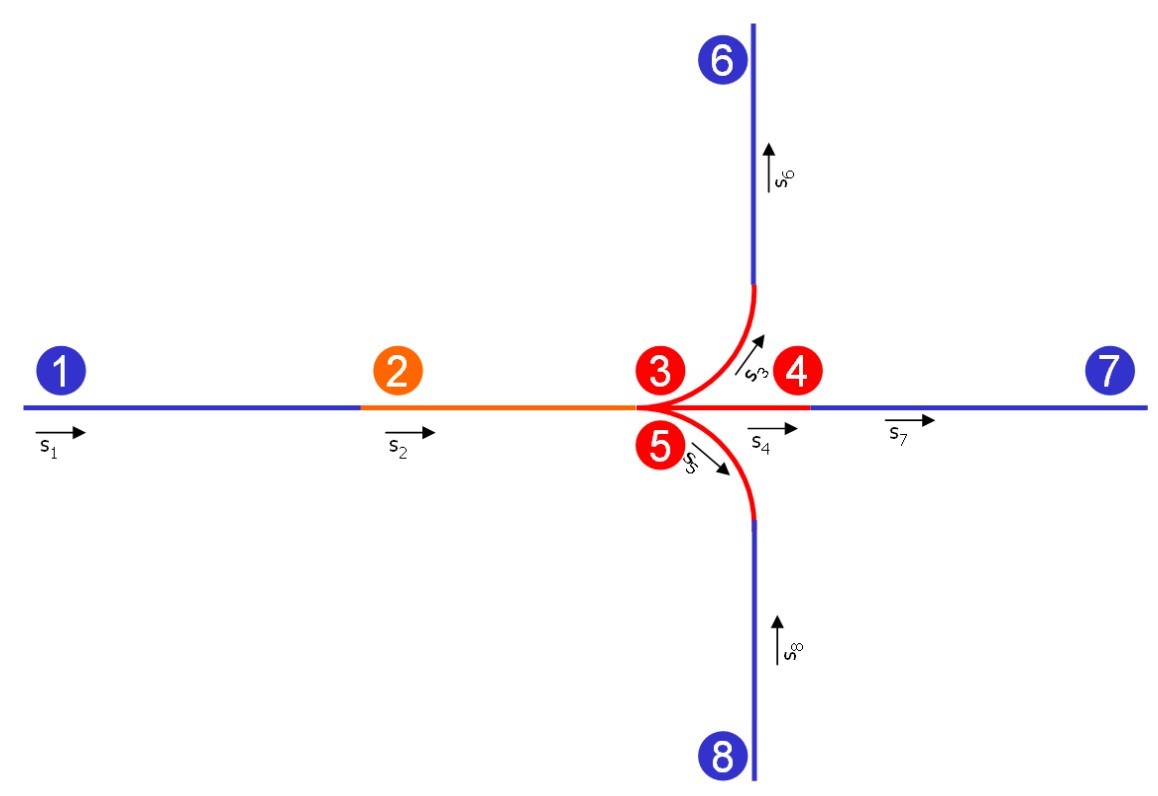
“参考线”这个翻译方式我不确定是否合适,其含义就是车道中间的标准线,如下图所示: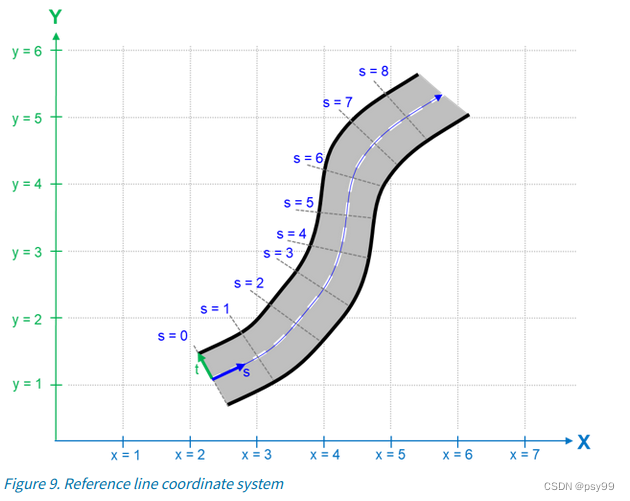
s代表参考线的切线方向,t与s方向正交,h是符合右手坐标系的方向,这里笔者直接截取官方说明的描述,翻译成中文总感觉少点什么
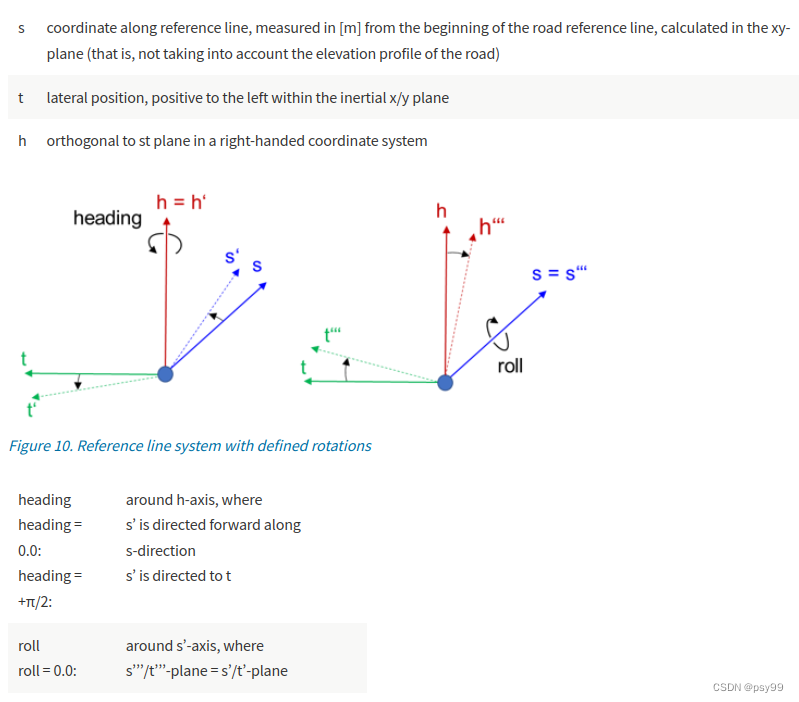 对于 s/t/h 坐标系,不可能有pitch。高程对 s 的长度没有影响。
对于 s/t/h 坐标系,不可能有pitch。高程对 s 的长度没有影响。
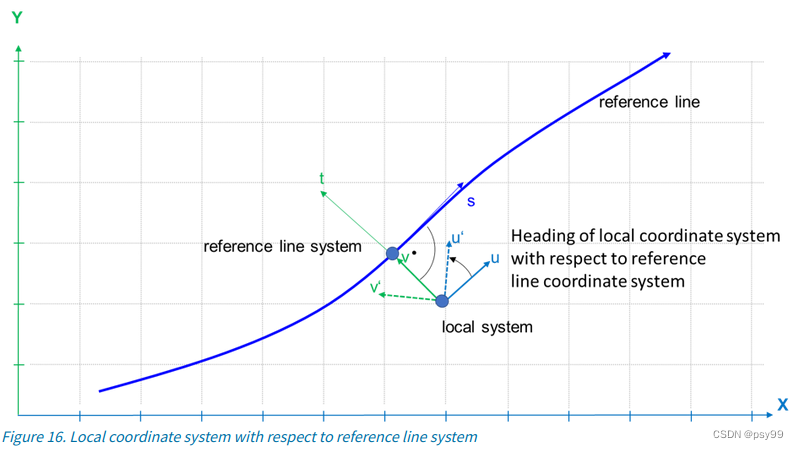
局部坐标系(Local)
笔者理解的局部坐标系:惯性坐标系向参考线坐标系进行平移后形成的更能反映局部特征的坐标系
FIgure14显示了相应角度的正轴和正方向。 局部系统只能通过提供参考线系统内的局部坐标系的原点以及局部系统相对于参考线系统的方向(航向)来定位在参考线空间中,如Figure 16 所示。
三种坐标系关系总结
三种坐标系对于不同的应用场景,具有其便利性。下图将三种坐标系整理在一个图中,清晰的展示了三者关系







![[OpenDrive] OpenDrive学习笔记](https://img-blog.csdnimg.cn/20190902170913369.?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3FxXzI2OTE1NzY5,size_16,color_FFFFFF,t_70)