通过使用基于PROJ(一种用于两个坐标系之间数据交换的格式)的投影字符串来完成对大地基准的描述。该数据应标为CDATA,因为其可能包含会干预元素属性XML语义的字符。
具体参数参考官方文档:Quick start — PROJ 9.2.0 documentation
<geoReference><![CDATA[+proj=utm +zone=32 +ellps=GRS80 +towgs84=0,0,0,0,0,0,0 +units=m +no_defs]]>
</geoReference><geoReference><![CDATA[+proj=tmerc +lat_0=0 +lon_0=0 +k=1 +x_0=0 +y_0=0 +datum=WGS84 +units=m +geoidgrids=egm96_15.gtx +vunits=m +no_defs ]]>
</geoReference>+proj:投影方法名称(附1)
+zone:带号
+ellps:椭圆坐标系
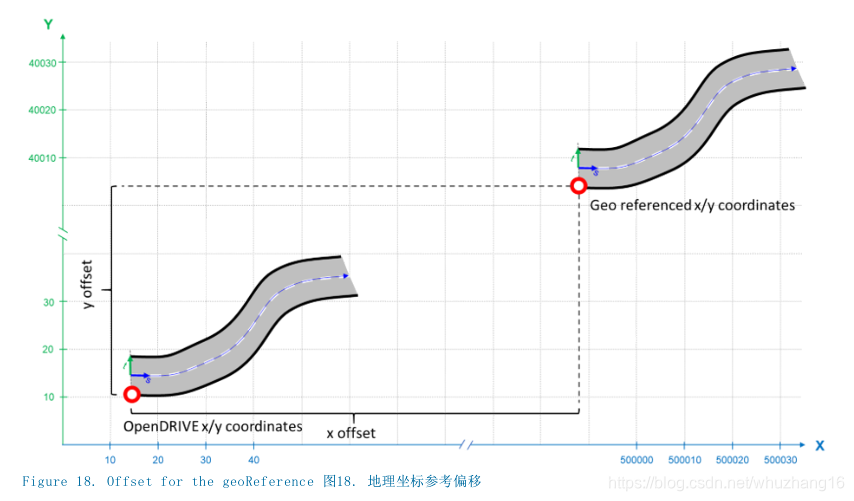
+x_0:东伪偏移
+y_0:北伪偏移
+units:水平单位(米、英尺等)
+vunits:垂直单位
+datum:地理坐标系统
+geoidgrids:用于垂直基准变换的GTX栅格文件的文件名(*.gtx)
+towgs84:3或7项基准变换参数
+axis=enu:轴方向,默认东北上+axis=enu:Cartographic projection — PROJ 9.2.1 documentation
附1:常见投影方法:
+proj
utm UTM(见附3)
merc Mercator
stere Stereographic
eqc Equidistant_Cylindrical
tmerc 高斯-克吕格/横轴墨卡托投影
lcc Lambert Conformal Conic
aea Albers Equal Area
sterea Oblique Stereographic Alternative
longlat
laea Lambert Azimuthal Equal Area
omerc Oblique Mercator
cass Cassini
somerc Swiss Oblique Mercator
nzmg New Zealand Map Grid
poly Polyconic (American)
krovak Krovak
附2 椭球体定义:
+ellps
| ellps | Parameters | Datum name |
|---|---|---|
| GRS80 | a=6378137.0 rf=298.257222101 | GRS 1980(IUGG, 1980) |
| airy | a=6377563.396 b=6356256.910 | Airy 1830 |
| bessel | a=6377397.155 rf=299.1528128 | Bessel 1841 |
| clrk66 | a=6378206.4 b=6356583.8 | Clarke 1866 |
| intl | a=6378388.0 rf=297. | International 1909 (Hayford) |
| WGS60 | a=6378165.0 rf=298.3 | WGS 60 |
| WGS66 | a=6378145.0 rf=298.25 | WGS 66 |
| WGS72 | a=6378135.0 rf=298.26 | WGS 72 |
| WGS84 | a=6378137.0 rf=298.257223563 | WGS 84 |
| sphere | a=6370997.0 b=6370997.0 | Normal Sphere (r=6370997) |
附3 UTM投影:
中国跨UTM带号43-53:
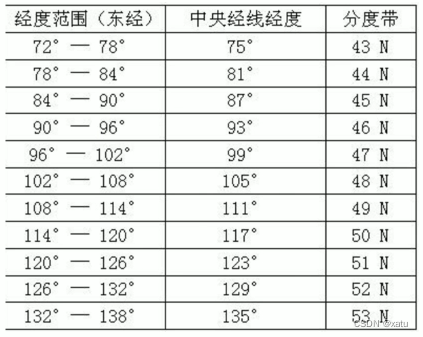
投影带带数=(经度整数位/6)的整数部分+31
附4 常见的地理坐标系:
| 坐标系名称 | 备注 |
|---|---|
| WGS 1984 | GPS采用的坐标系 |
| Beijing 1954 | 北京1954坐标系 |
| Xian 1980 | 西安1980坐标系 |
| CGCS2000/Gauss-Kruger | 国家2000 |
附5 EPS编码:
查询地址:EPSG.io: Coordinate Systems Worldwide
如:





![[OpenDrive] OpenDrive学习笔记](https://img-blog.csdnimg.cn/20190902170913369.?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3FxXzI2OTE1NzY5,size_16,color_FFFFFF,t_70)