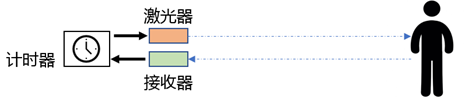
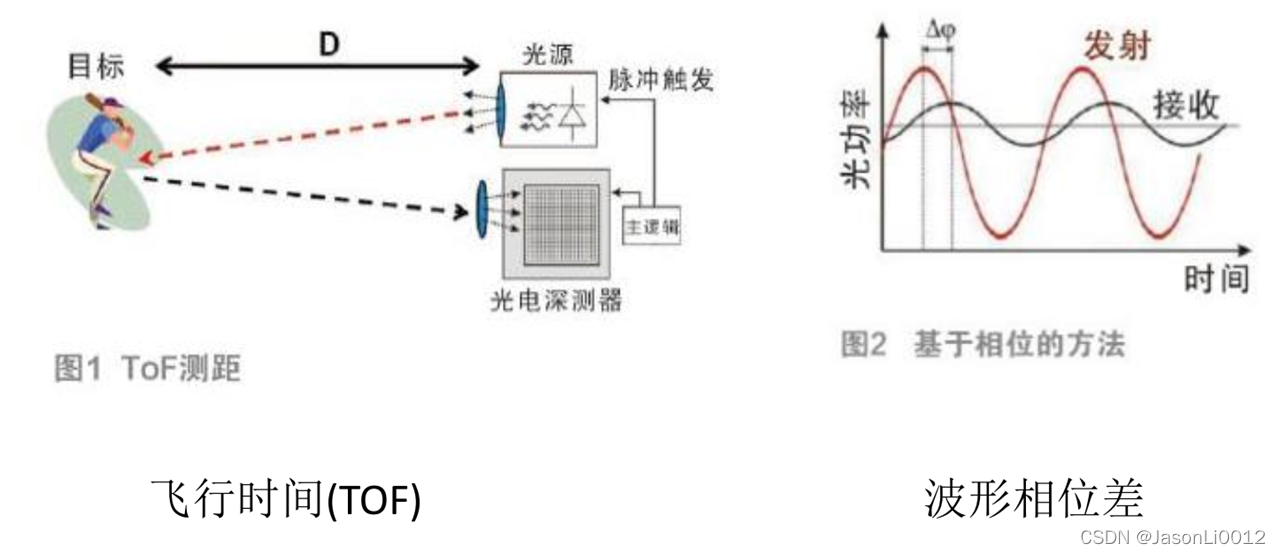
激光雷达测距的原理,可以看B站这个视频:How Does LiDAR Remote Sensing Work?
激光雷达扫描的一些基本概念:
一帧点云,指完成一圈(360度)扫描,形成的点云集合。
线数,指垂直方向发射的激光束的数量,有16线、32线、64线等。
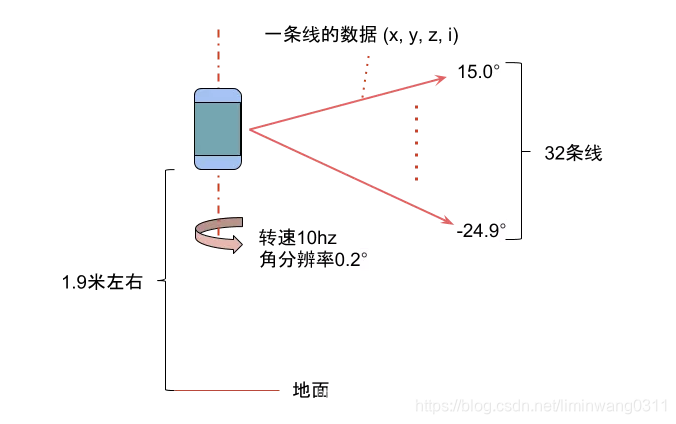
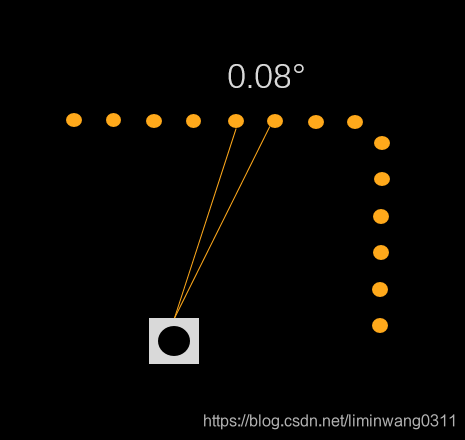
角分辨率,指水平方向相邻两个点之间的夹角。
而激光雷达在扫描(旋转)过程中是随车辆移动的,即进行“一帧点云”数据采集时,所有点并不是在一个坐标系中采集的。去畸变的方法可参加:2D激光雷达运动畸变去除
激光雷达测距的原理,可以看B站这个视频:How Does LiDAR Remote Sensing Work?
激光雷达扫描的一些基本概念:
一帧点云,指完成一圈(360度)扫描,形成的点云集合。
线数,指垂直方向发射的激光束的数量,有16线、32线、64线等。
角分辨率,指水平方向相邻两个点之间的夹角。
而激光雷达在扫描(旋转)过程中是随车辆移动的,即进行“一帧点云”数据采集时,所有点并不是在一个坐标系中采集的。去畸变的方法可参加:2D激光雷达运动畸变去除