目录
一、感应电机三相数学模型
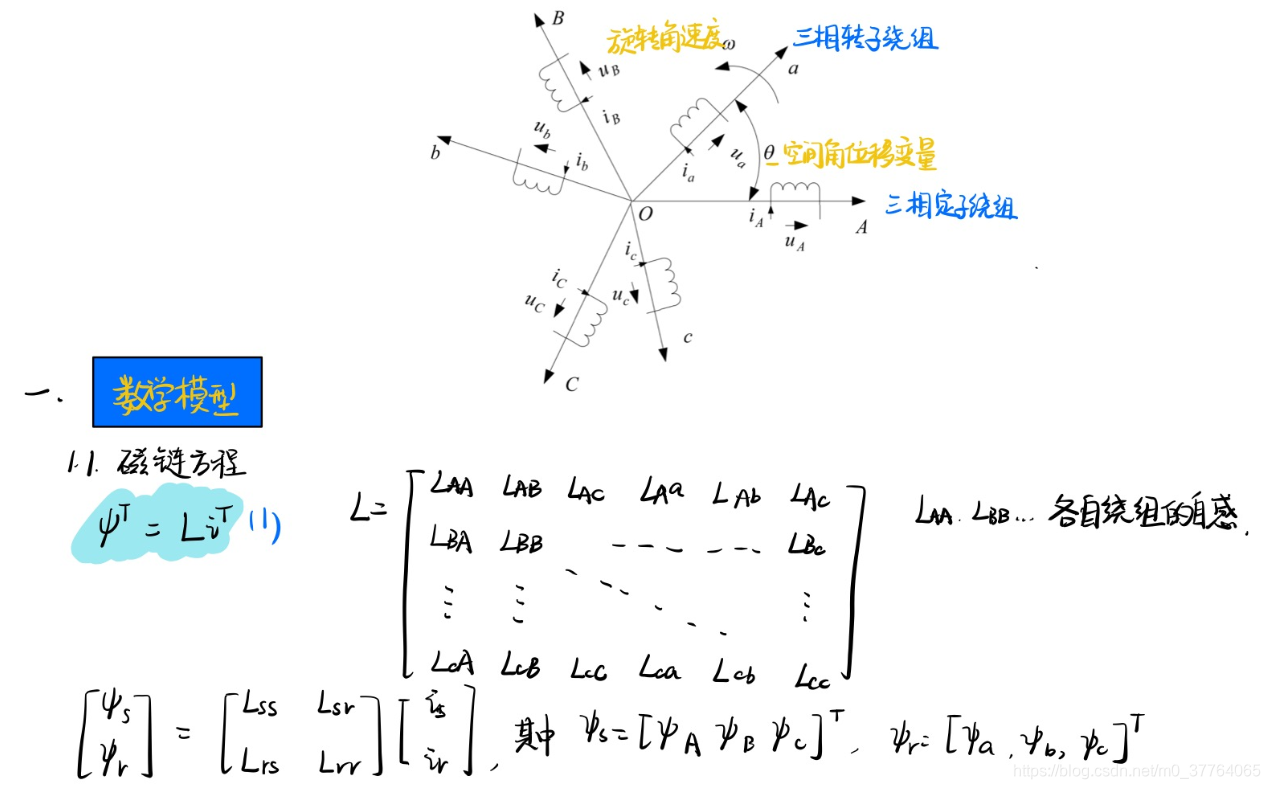
1.1 磁链方程
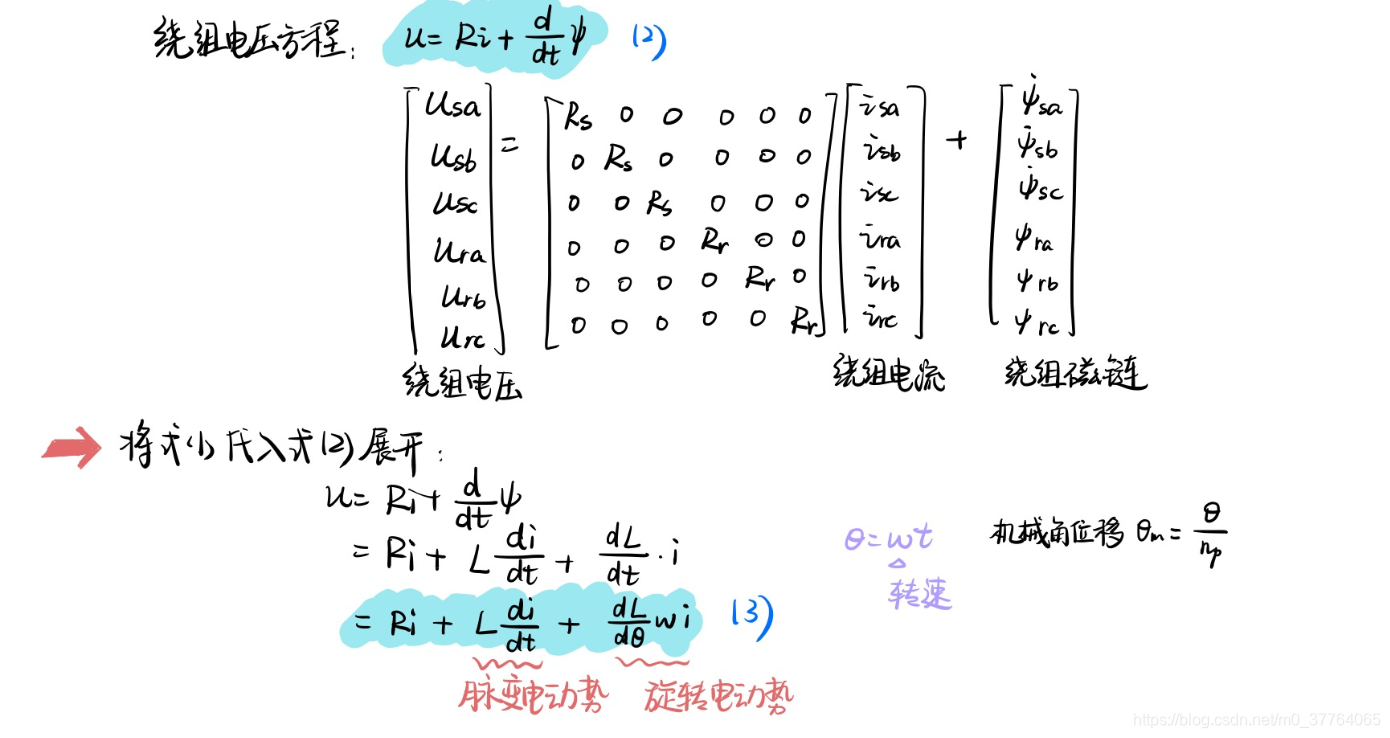
1.2 电压方程
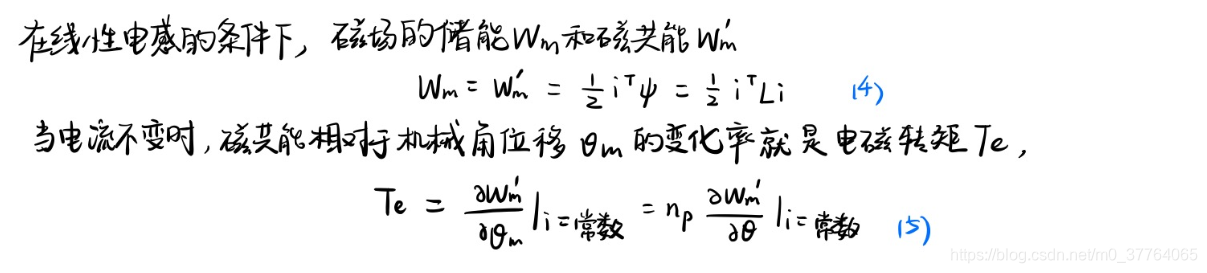
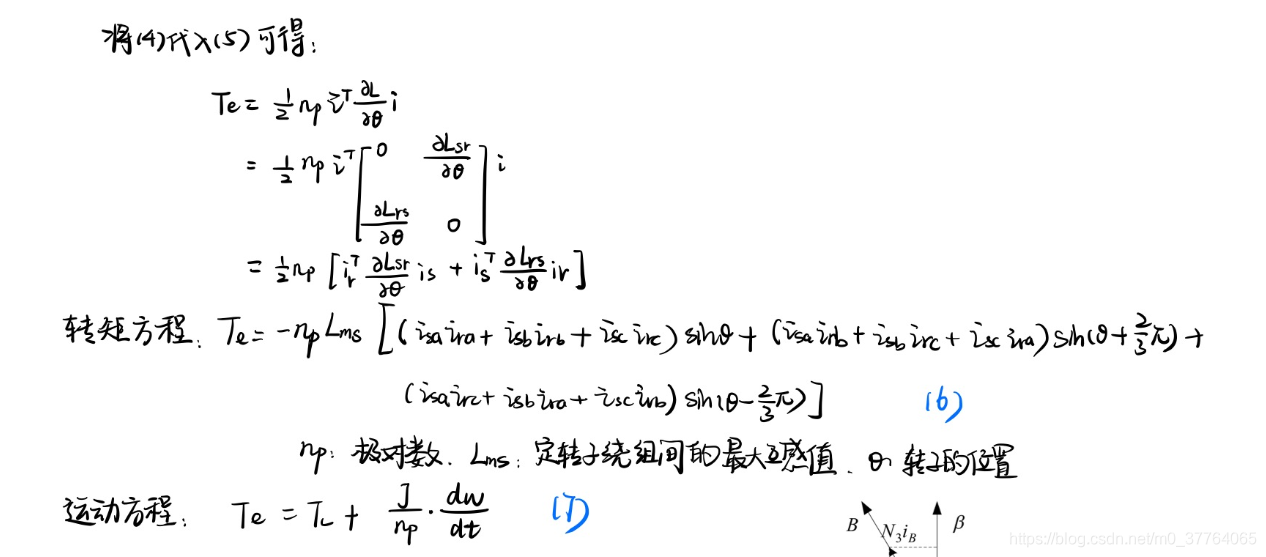
1.3 转矩方程和运动方程
二、坐标变换
2.1 原理
2.2 Clarke变换和逆变换
2.3 Park变换和逆变换
三、感应电机两相数学模型 .
3.1 αβ坐标系中
3.2 dq坐标系中
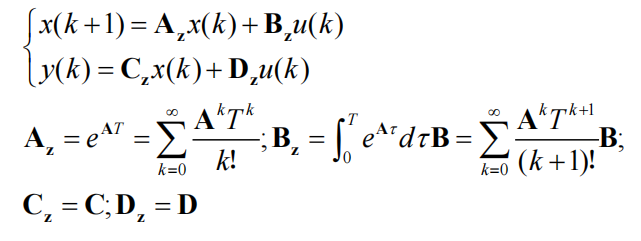
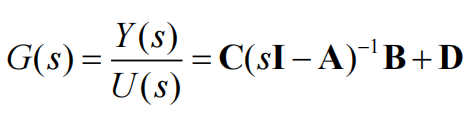
四、感应电机状态方程
4.1 状态变量的选择
4.1.1 dq坐标系下
4.1.2 αβ坐标系下
一、感应电机三相数学模型
1.1 磁链方程
1.2 电压方程
1.3 转矩方程和运动方程
二、坐标变换
2.1 原理
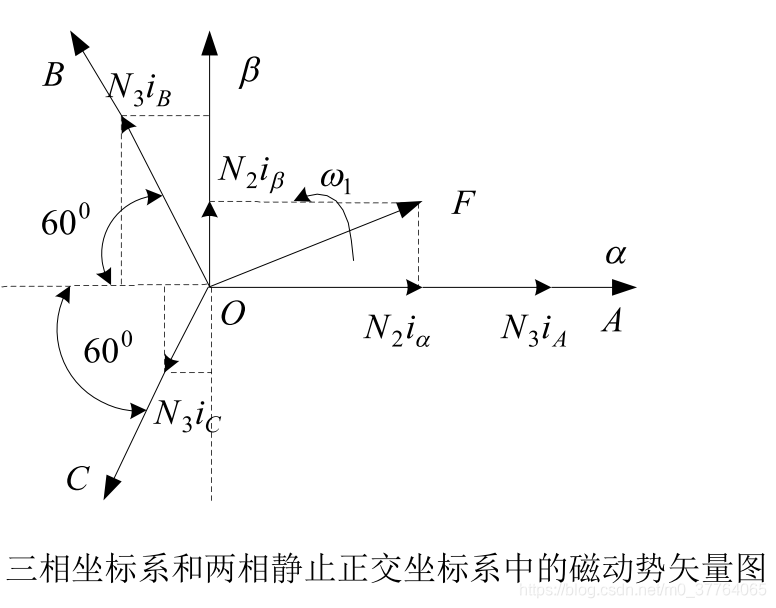
变换前后电机绕组产生的合成磁动势相同。
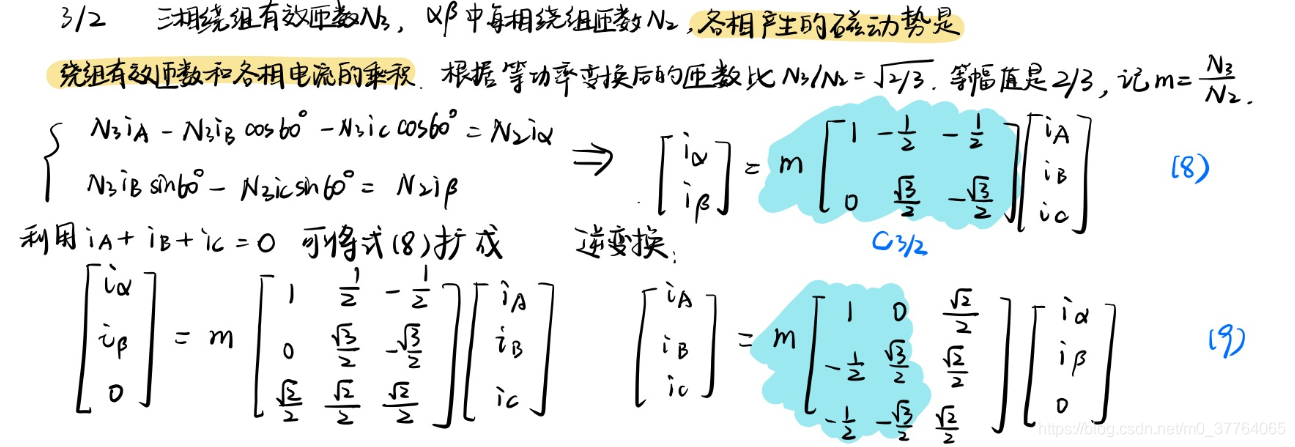
2.2 Clarke变换和逆变换
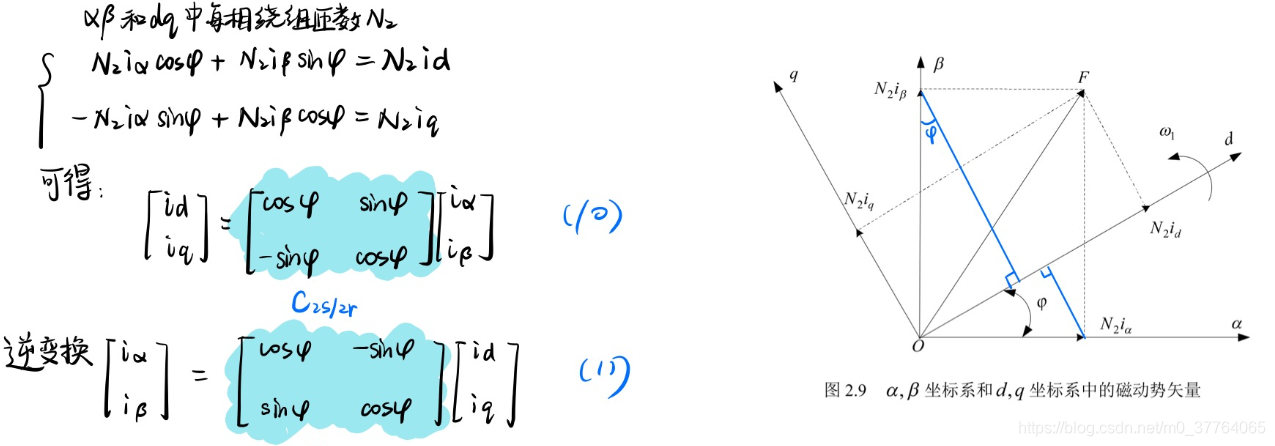
2.3 Park变换和逆变换
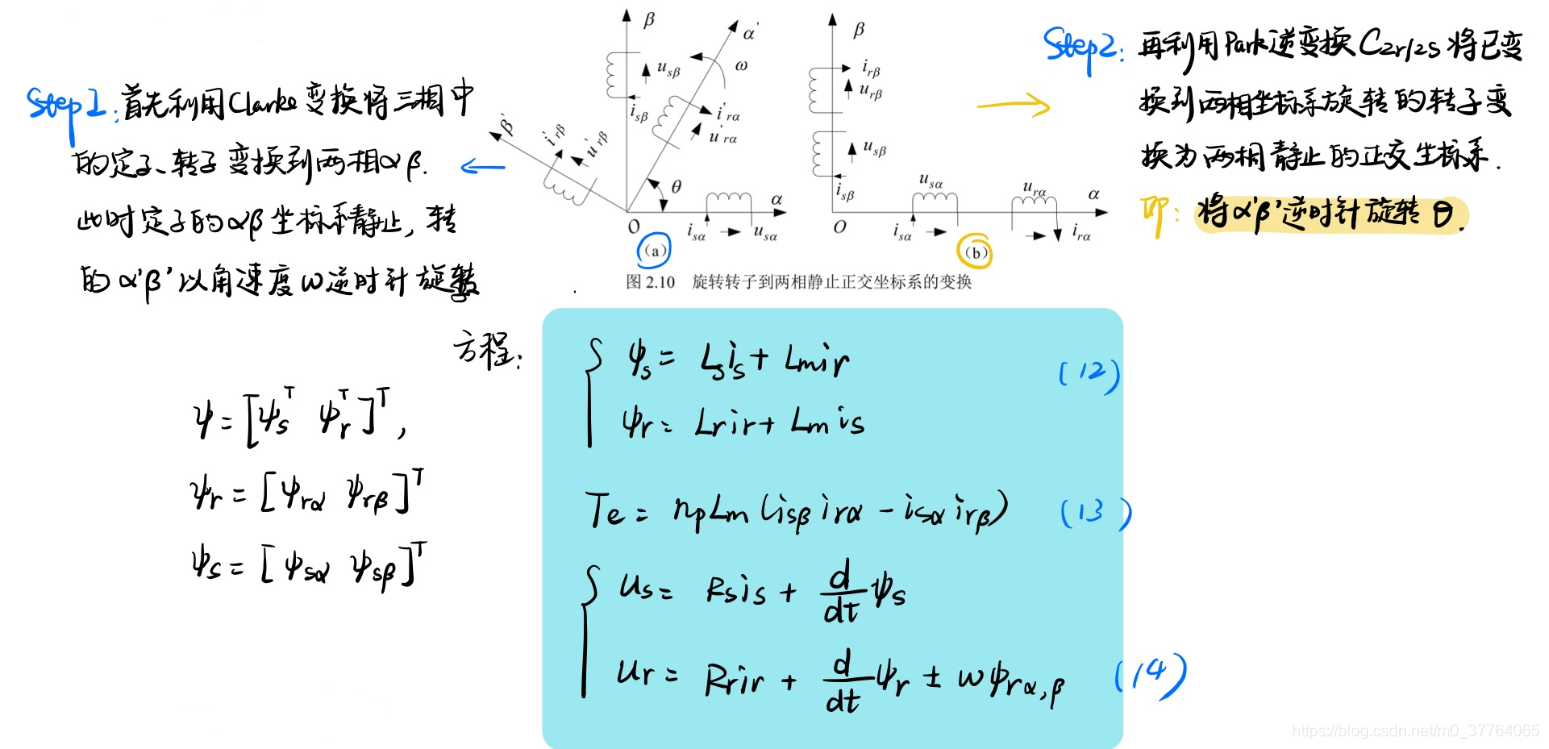
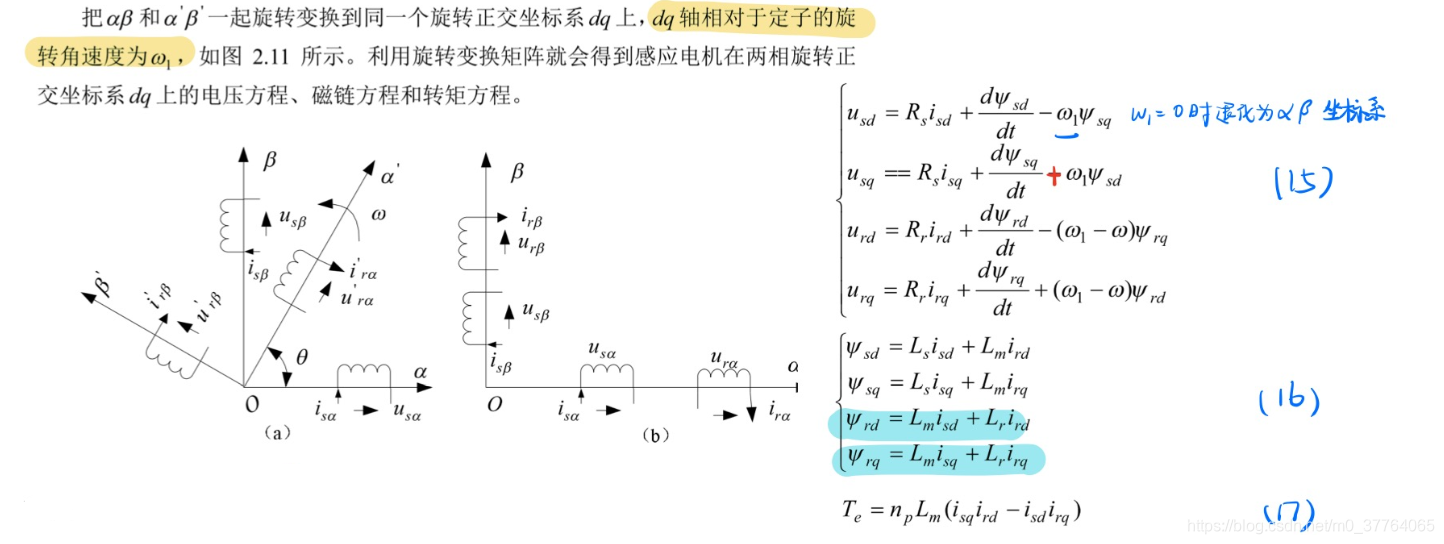
三、感应电机两相数学模型 .
3.1 αβ坐标系中
3.2 dq坐标系中
四、感应电机状态方程
4.1 状态变量的选择
转速是电机的输出变量,定子电流
可直接测量,因此可选为状态变量其他都不好测,但是由于磁链so important,因此可选定子磁链
或者转子磁链
为另一个状态变量。
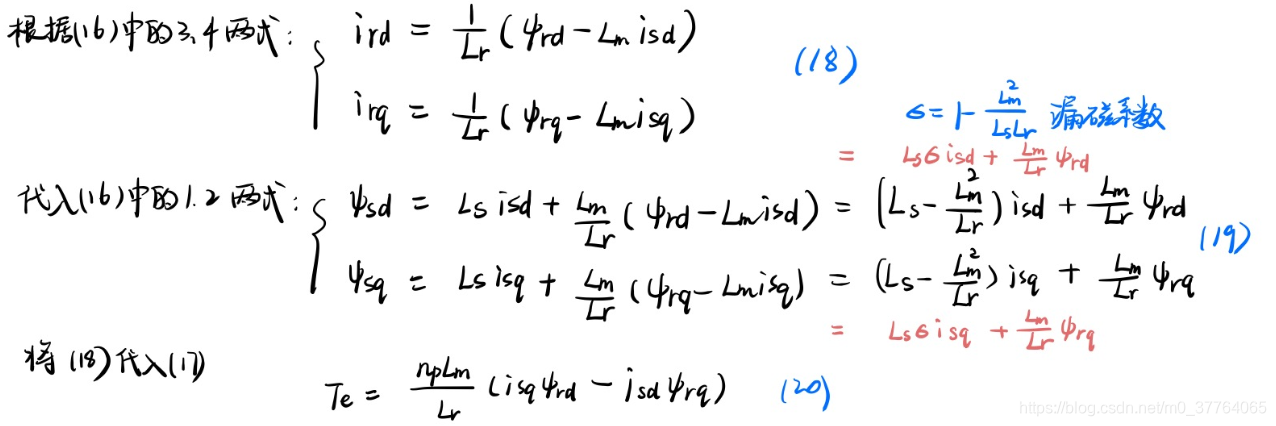
先选择定子电流和转子磁链
推导状态空间方程,选择定子磁链
的懒得写了。
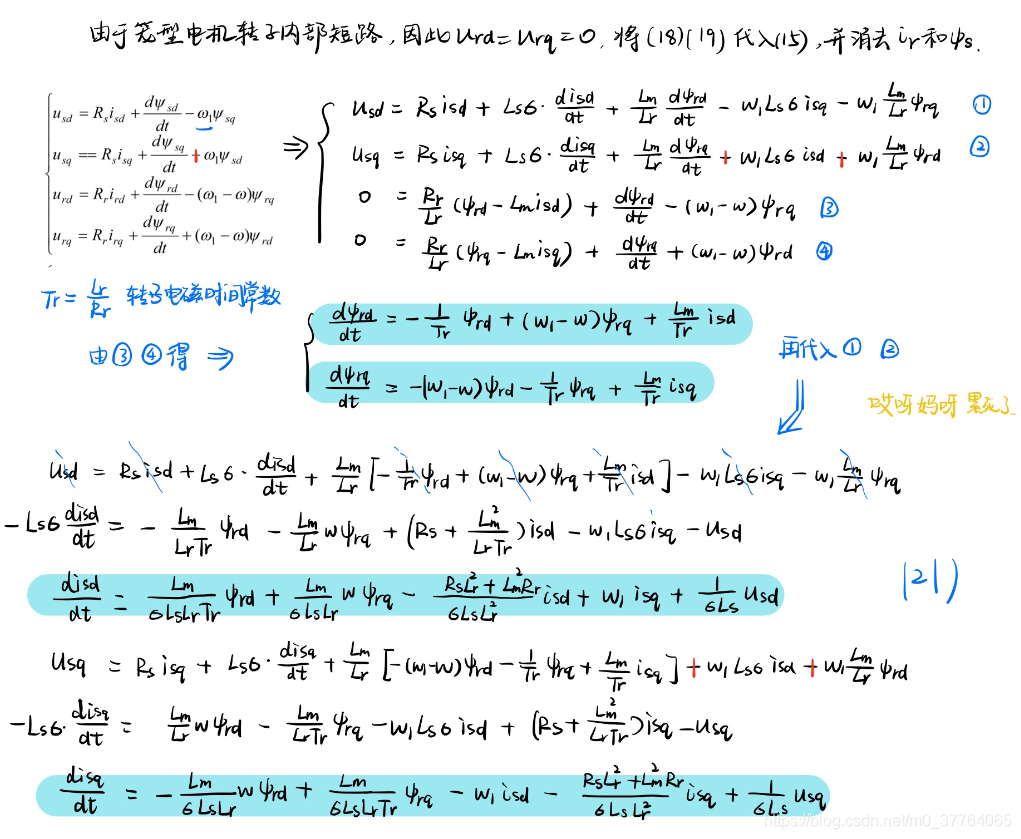
4.1.1 dq坐标系下
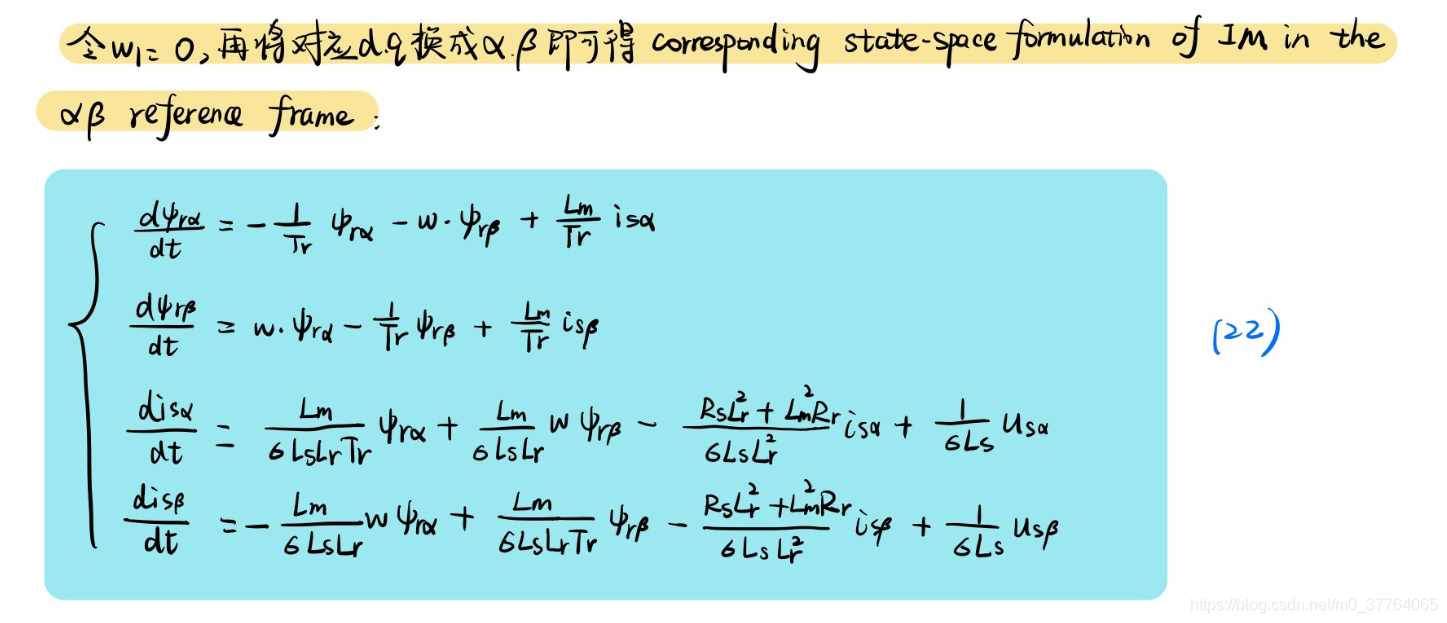
4.1.2 αβ坐标系下
参考文献:
[1]崔春艳.电动汽车感应电机滑模变结构控制技术研究[D].河北:河北工业大学,2014. DOI:10.7666/d.D680428.



![[现代控制理论]2_state-space状态空间方程](https://img-blog.csdnimg.cn/06f8faa0b32a4ae88802d588d3e85463.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA6LWw5bGx5YGc5rC0,size_20,color_FFFFFF,t_70,g_se,x_16)







![[译]理解PG如何执行一个查询-1](https://img-blog.csdnimg.cn/img_convert/10d0b27d31ad7923560b0962e18f6392.png)