文章目录
Adaptive Cruise Control (ACC) Test Scenarios
PreScan scenario models available with the ACC system
ACC模型的几个预扫描场景可用:
·真实生活场景–系统的典型用例
·ISO测试协议
这些模型展示了如何使用PreScan对ADAS系统进行建模,并提供“模板”场景,典型地用于测试特定的ADAS系统。
FILING AND SETTING-UP OF THE MODELS(模型的归档和建立)
预扫描场景模型存储在DestinationFolder/TestScenarios/ACC中。
Before listing the available test models, instructions are given on how to define the initial conditions.
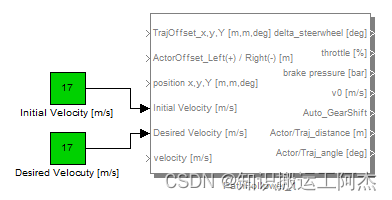
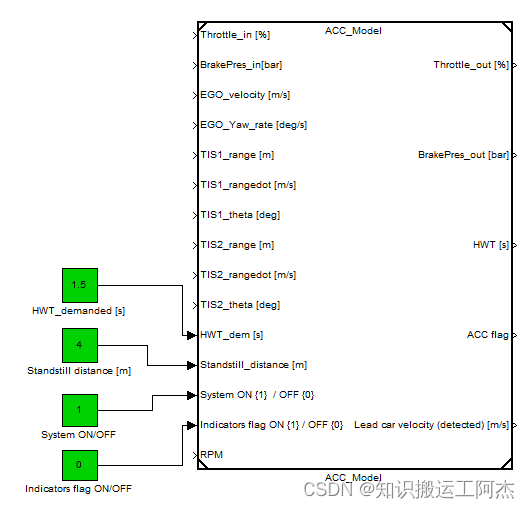
All the ISO tests have already been set up according to the normative documents, while the Real-life scenarios can be arbitrary set up. The user-defined inputs of the ACC controller are highlighted in green in the figure below:(所有ISO测试都已经根据规范性文件进行了设置,而现实生活场景可以任意设置。ACC控制器的用户定义输入在下图中以绿色突出显示:
·Initial and Desired Velocity [m/s]: inputs to the Path Follower(初始和期望速度[m/s]:路径跟随器的输入
·Demanded Headway time (HWT_dem [s]): relative distance/absolute host car velocity (1.5s, 1.8s, 2.1s, 2.5s)(·要求行车间隔时间(HWT_dem[s]):相对距离/主车绝对速度(1.5s、1.8s、2.1s、2.5s))
·Standstill distance: minimum gap to the preceding stationary vehicle to be maintained when host car comes to full stop(·静止距离:当主车完全停止时,与前面静止车辆保持的最小间隙)
·System ON{1}/OFF{0}: Boolean value needed to turn ON/OFF the system(·系统打开{1}/关闭{0}:打开/关闭系统所需的布尔值)
·Indicators flag ON{1}/OFF{0}: Boolean input making the indicator light active (1) or inactive (0) (driver’s action). It is always 0 for the ISO test protocols.(·指示器标志ON{1}/OFF{0}:布尔输入使指示灯激活(1)或不激活(0)(驾驶员操作)。对于ISO测试协议,它始终为0。)
Note: The ACC controller can further be customized according to user requirements, for details please refer to explanation in the next chapter; Adaptive Cruise Control System.
注:ACC控制器可根据用户要求进一步定制,详情请参阅下一章的说明;自适应巡航控制系统。
Real-life scenarios
The ACC is meant for facilitating driving in the complete range of velocities: 0-200Km/h mainly in motorway conditions. There are separate scenarios built that represent high-speed motorway driving (8 tests) and low-speed (2 tests) that represent traffic jam driving.(ACC旨在促进在整个速度范围内行驶:0-200Km/h,主要是在高速公路条件下。构建了代表高速高速公路驾驶(8次测试)和代表交通拥堵驾驶的低速(2次测试)的单独场景。)
Motorway free-flowing traffic
Host car travels at 100km/h. Lead car drives ahead on the same lane and performs braking and acceleration maneuvering:
高速公路自由流动交通
主车以100公里/小时的速度行驶。领头车在同一车道上向前行驶,并执行制动和加速操纵:
-ACC_Scenario_001 Lead car drives constant speed 100km/h
牵引车匀速行驶100km/h
-ACC_Scenario_002 Lead car drives at lower velocity (delta v = 40km/h)
领头车以较低速度行驶(Δv=40km/h)
-ACC_Scenario_003 Lead car slows down and accelerates
领头车减速加速
-ACC_Scenario_004 Lead car accelerates and slows down
领头车加速和减速
-ACC_Scenario_005 Lead car slows down to a full stop (This scenario indicates a situation where the ACC system fails to avoid collision due to the relative speed profiles of the two vehicles, even though functionality wise it is behaving correctly).(领头车减速至完全停止(这种情况表明,由于两辆车的相对速度曲线,ACC系统无法避免碰撞,即使其功能正常)。)
Motorway free-flowing. Traffic on bend road
Host car travels at 80Km/h. Lead car drives ahead on the same lane and slows down:
高速公路自由流动。弯道交通
主车以80公里/小时的速度行驶。领头车在同一车道上向前行驶并减速:
-ACC_Scenario_006
Motorway free-flowing traffic. Re-targeting
Host car travels at 100km/h. Lead car drives in front on the same lane.
高速公路自由流动的交通。重新定位
主车以100公里/小时的速度行驶。领头车在同一车道上向前行驶。
-ACC_Scenario_007 Third car cuts in from the side lane
第三辆车从侧车道驶入
-ACC_Scenario_008 Third car cuts in from the side lane and cuts out
第三辆车从侧车道切入并驶出
·Motorway slow traffic (Stop&Go) Host car travels at 20Km/h in slow moving traffic column. Lead car drives in front on the same lane:
·高速公路慢行(停止和行驶)
主车以20Km/h的速度在缓慢移动的交通柱中行驶。领头车在同一车道上向前行驶:
ACC_Stop_GO_001 Lead car drive within 7-10 Km/h (slowly moving vehicles in line)
在7-10公里/小时内引导车辆行驶(缓慢行驶的车辆排成一列)
-ACC_Stop_GO_002 Lead car goes and stops within 0-10 Km/h
引导车在0-10公里/小时内行驶和停止
ISO Test protocol - Performance test conditions(ISO测试协议-性能测试条件)
The International Organization for Standardization issued 3 normative documents defining the performance and testing requirements for the ACC with Stop&Go systems: (国际标准化组织发布了3份规范性文件,定义了带停止和停止系统的ACC的性能和测试要求:)
ISO 15622:2002 – for Adaptive Cruise Control system (ACC)
·ISO 22178:2009 – for Low Speed Following (LSF)
·ISO/NP 22179 – for Full Speed Range Adaptive Cruise Control
15622:2002和ISO/NP 22179中的ISO性能测试旨在评估ACC和全速ACC在不同驾驶条件下的有效性。ISO 22178中的ISO性能测试旨在评估ACC在低速行驶条件下的有效性。
规定的测试在测试跑道上的受控条件下进行。
ISO PERFORMANCE TESTS AVAILABLE IN PRESCAN(预扫描中可用的ISO性能测试)
In all the ISO test protocols available in PreScan the ACC controller is set up as follows:
1.Headway Time (HWT) set to 1.5s or 2.5s (min and max, respectively) according to the ISO test protocol(1.根据ISO测试协议,行车间隔时间(HWT)设置为1.5s或2.5s(分别为最小值和最大值)
2.Standstill distance = 4 [m] 2.静止距离=4[m]
3.Indicator lights OFF 指示灯熄灭
Figures marked with a * are taken from the ISO normative document (International standard ISO 22178:2009_Intelligent transport systems-Low speed following (LSF) systems-Performance requirements and test procedures).(标有*的数字取自ISO标准文件(国际标准ISO 22178:2009——智能运输系统低速跟随(LSF)系统性能要求和测试程序)。)
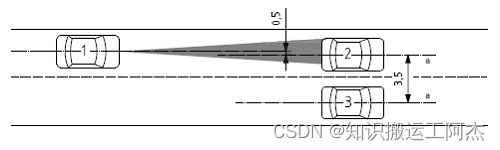
·ACC_ISO_test_001 Target Discrimination(识别) test [ISO 15622, ISO 22178]
The host car [1] follows Lead car [2], third car [3] is traveling on the adjacent lane.
Lead car [2] accelerates. (主轿厢[1]跟随主轿厢[2],第三轿厢[3]在相邻车道上行驶。
领头车[2]加速。)
The test is successful if host car passes the third car [3] while under ACC control.(如果主车在ACC控制下通过第三辆车[3],则测试成功)
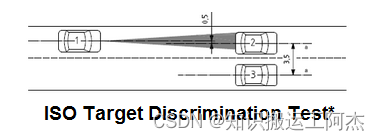
The following motion conditions are applied:
-Lead car constantly accelerates from 24 m/s up to 27 m/s.
-Host car initial velocity > 27 m/s.
·ACC_ISO_test_002 Automatic Deceleration test [ISO 22178]
The host car [1] follows Lead car [2].
The host car decelerates at the rate of 2.5m/s2 to a full stop. (主车以2.5m/s2的速度减速至完全停止。)
The test is successful if the host car decelerates behind the target to a full stop.(如果主车在目标后方减速至完全停止,则测试成功。)
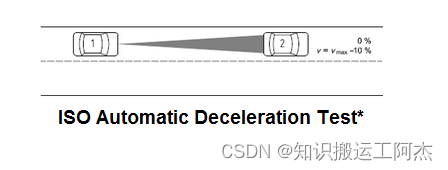
The following motion conditions are applied:
-Lead car constant speed of 13.9 m/s; it decelerates to full stop with constant deceleration (2.5 m/s2).(-牵引车恒速13.9 m/s;它以恒定的减速(2.5m/s2)减速至完全停止。)
-Host car initial speed > 13.9 m/s.(-主轿厢初始速度>13.9 m/s。
·ACC_ISO_test_003 Automatic Retargeting Capability test(自动重定目标 [ISO 22178]
The host car [1] follows the Lead car [2].
The Lead car [2] changes lane to overtake a slow moving vehicle [3] in front.
The test is successful once host car re-targets to the slow moving vehicle [3] and follows keeping the HWT clearance.(一旦主车重新瞄准缓慢移动的车辆[3],并保持HWT间隙,测试就成功了。)
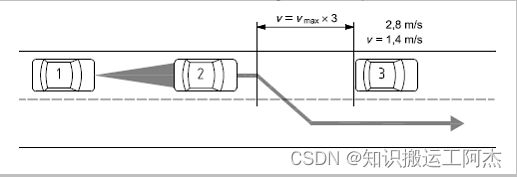
The following motion conditions are applied:
-Lead car [2] drives at a constant speed of 13.9 m/s and changes lane.
-Lead car [3] constant speed = 2.1 m/s.
-Host car initial speed > 13.9 m/s.
·ACC_ISO_test_004 Curve capability test (1) [15622, ISO 22179]
The host car follows Lead car on a curve at constant speed.
The test track has a constant curvature of 1/500 [m].(测试跑道具有1/500[m]的恒定曲率
The test is successful if host car starts decelerating within 1/3 of HWT.(如果主车在HWT的1/3内开始减速,则测试成功。
The following motion conditions are applied:
-Lead car drives at a constant speed of 31.6 m/s for 10 sec, decreases its speed by 3.5 m/s in 2 sec and keeps it constant.(-领头车以31.6 m/s的恒定速度行驶10秒,在2秒内将其速度降低3.5 m/s并保持恒定。
-Host car initial speed = 31.6 m/s.
·ACC_ISO_test_005 Curve capability test (2) [ISO 15622, ISO 22179]
The host car follows Lead car on a curve at constant speed.
The test track has a constant curvature of 1/250 [m].
The test is successful if host car starts decelerating within 1/3 of HWT.
The following motion conditions are applied:
-Lead car drives at a constant speed of 24 m/s for 10 sec, decreases its speed by 3.5 m/s in 2 sec and keeps it constant.(-领头车以24米/秒的恒定速度行驶10秒,在2秒内将其速度降低3.5米/秒,并保持恒定。
-Host car initial speed = 24 m/s.
ACC_ISO_test_006 Curve capability test (3) [ISO 15622, ISO 22179]
The host car follows Lead car on a curve at constant speed.
The test track has a constant curvature of 1/125 [m].
The test is successful if host car starts decelerating within 1/3 of HWT.
The following motion conditions are applied:
-Lead car drives at a constant speed of 17 m/s for 10 sec, decreases its speed by 3.5 m/s in 2 sec and keeps it constant.(-领头车以17 m/s的恒定速度行驶10秒,在2秒内将其速度降低3.5 m/s,并保持恒定。
-Host car initial speed = 17 m/s.
ACC_ISO_test_007 Target Discrimination test [ISO 22178]
The host car [1] follows Lead car [2], third car [3] is traveling on the adjacent lane.
Lead car [2] accelerates.
The test is successful if host car passes the third car [3] while under ACC control.
The following motion conditions are applied:
-Lead car constantly accelerates from 10.9 m/s up to 13.9 m/s.(-领头车不断从10.9 m/s加速至13.9 m/s。)
-Host car initial speed = 13.9 m/s.
·ACC_ISO_test_008 Curve capability test [ISO 22178]
The host car follows Lead car on a curve at constant speed.
The test track has a constant curvature of 1/125 [m].
The test is successful if host car starts decelerating within 1/3 of HWT.(如果主车在HWT的1/3内开始减速,则测试成功。)
The following motion conditions are applied:
-Lead car drives at a constant speed of 13.9 m/s for 10 sec, decreases its speed by 3.5 m/s in 2 sec and keeps it constant.(-领头车以13.9 m/s的恒定速度行驶10秒,在2秒内将其速度降低3.5 m/s,并保持恒定。
-Host car initial speed = 13.9 m/s.
![[Prescan]Prescan中Sensor学习](https://img-blog.csdnimg.cn/2019100909585445.png)