学习目的
iio子系统主要提供对ADC、DAC相关的设备驱动框架。面向的设备包括:
1.ADC芯片;2.DAC芯片;3.温度传感器;4.光感器;5.陀螺仪;6.加速度传感器;7.CDCs;8.IMUs;9.压力传感器等
公司以前的sensor驱动以及sensorHAL都是使用input子系统,而纵观其他厂商以及google,都已经不再使用这个框架,iio这个子系统框架才是目前的主流。因此有必要弄清楚这个子系统通路,了解驱动如何实现以及数据如何读取。
全文主要分两个部分,分别是驱动层实现和用户空间接口。
驱动层主要囊括相关的数据结构以及接口,然后以inv_mpu6050驱动为例进行分析。
用户层以节点的使用为主,以android的invensense hal层为例进行分析。
参考博客:
lickylin的专栏_jerry_chg_CSDN博客-Linux 内核,linux 网络,数据结构与算法领域博主
https://blog.csdn.net/u014078917/category_8417773.html
iio子系统驱动层
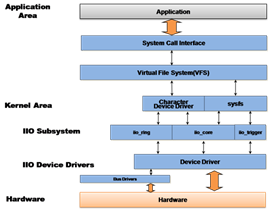
iio驱动实际属于字符设备驱动的一种,其核心代码位于kernel/drivers/iio目录下。下图是框架图:

驱动框架中,核心部分就是iio_ring、iio_core和iio_trigger这三部分。其中iio_core是整个iio子系统的核心组合,iio_ring是连续数据的buffer核心,iio_trigger是触发器的核心,这三个部分与用户空间交互主要是通过字符设备驱动节点与sysfs,iio_core由于是整个的核心,因此交互部分不能绕过它,而iio_ring的读取主要是通过字符设备驱动节点挂钩,而iio_trigger则是通过sysfs来进行控制。
简介
1.对于连续数据采集相关功能,主要由iio buffer实现(iio_ring); 2.连续数据采集的触发机制,主要由iio trigger实现; 3.iio device的事件触发机制,主要由iio event实现; 4.提供单次原始数据的采集功能,主要通过syfs属性文件实现。
主要的数据结构:
struct iio_dev,描述一个iio device struct iio_event_interface,描述iio device的事件触发模块的数据结构;
struct iio_buffer,描述iio device连续数据采集功能相关的数据结构;
struct iio_trigger,描述iio device的trigger机制相关的数据结构
struct iio_chan_spec,描述iio device的一个通道的属性信息;
struct iio_info,描述iio device各通道的原始数据读取接口、event使能与event参数读写相关接口、trigger有效性检测接口、设备树节点解析等接口;
struct iio_buffer_setup_ops,描述iio buffer使能与否的接口(建立iio buffer与iio tigger的关联,从而保证iio trigger触发后,可将数据刷新到对应的iio buffer中);
struct iio_chan_spec_ext_info,描述一个channel扩展属性相关的信息,包括属性名称、读写接口等
struct iio_trigger_ops,表示iio trigger的操作接口,包括设置trigger的状态(使能与否)、重新使能trigger、设备有效性判断等接口;
struct iio_buffer_access_funcs,描述iio buffer的access接口,包括数据写入到iio buffer的缓存、缓存数据是否有效、从缓存中读取数据等等接口。
数据结构
1.struct iio_dev
描述一个iio device
507 struct iio_dev {
508 int id;
509
510 int modes;
511 int currentmode;
512 struct device dev;
513
514 struct iio_event_interface *event_interface;
515
516 struct iio_buffer *buffer;
517 struct list_head buffer_list;
518 int scan_bytes;
519 struct mutex mlock;
520
521 const unsigned long *available_scan_masks;
522 unsigned masklength;
523 const unsigned long *active_scan_mask;
524 bool scan_timestamp;
525 unsigned scan_index_timestamp;
526 struct iio_trigger *trig;
527 bool trig_readonly;
528 struct iio_poll_func *pollfunc;
529 struct iio_poll_func *pollfunc_event;
530
531 struct iio_chan_spec const *channels;
532 int num_channels;
533
534 struct list_head channel_attr_list;
535 struct attribute_group chan_attr_group;
536 const char *name;
537 const struct iio_info *info;
538 clockid_t clock_id;
539 struct mutex info_exist_lock;
540 const struct iio_buffer_setup_ops *setup_ops;
541 struct cdev chrdev;
542 #define IIO_MAX_GROUPS 6
543 const struct attribute_group *groups[IIO_MAX_GROUPS + 1];
544 int groupcounter;
545
546 unsigned long flags;
547 #if defined(CONFIG_DEBUG_FS)
548 struct dentry *debugfs_dentry;
549 unsigned cached_reg_addr;
550 #endif
551 };1.modes与currentmode表示该iio device支持的模式以及当前所处的模式,目前支持5种模式
319 #define INDIO_DIRECT_MODE 0x01
320 #define INDIO_BUFFER_TRIGGERED 0x02
321 #define INDIO_BUFFER_SOFTWARE 0x04
322 #define INDIO_BUFFER_HARDWARE 0x08
323 #define INDIO_EVENT_TRIGGERED 0x10INDIO_DIRECT_MODE表示不对采集数据进行缓存,可直接读取单次的数据(可通过访问sysfs下的属性节点文件读取)。
INDIO_BUFFER_XXX表示支持对iio device采集数据进行缓存的模式,可理解为采集连续的数据(这些数据则需要通过访问字符设备文件进行读取,即通过iio_ring部分)。
INDIO_EVENT_TRIGGERED则主要表示事件触发功能,如针对温度传感器可监控当前是否超过温度告警上限或下限,当出现温度告警后则向SOC发送中断信号,
2.dev主要借助系统的设备驱动模型,实现对iio device的引用计数,并绑定至iio总线上,同时借助设备驱动模型可在sysfs目录下创建该设备的目录和属性文件。
3.event_interface表示event事件相关的数据结构,该数据结构内部包含一个kfifo,存储iio device push的event信息。
4.buffer表示该iio device对应的iio_buffer,针对连续采集数据模式,若不支持,则无需创建。
5.buffer_list则在一个iio buffer enable时,将active iio buffer加入到该链表中(目前基本上只将iio_dev->buffer添加到该链表上)。
6.scan_bytes表示单次采集数据的长度,该值主要根据当前的active channel的个数,每一个通道采集数据的长度计算而得。
7.available_scan_masks表示当前iio device可使用的channel的掩码,如当前有8个channel,仅前4个channel可用,则可以设置available_scan_masks值为0x0F。
8.active_scan_mask则表示当前已使能的channel掩码,这个mask是available_scan_masks的子集,不能超出其范围。
scan_bytes、available_scan_masks、active_scan_mask主要由iio buffer使用,scan_bytes是单次采集数据的长度,因此通过字符设备文件读取buffer采集数据时,传递的内存长度至少应为scan_bytes。
9.scan_timestamp、scan_index_timestamp主要对于通过buffer采集的数据是否需要时间戳,如果需要对采集的数据增加时间戳,则增加IIO_TIMESTAMP类型的虚拟channel,使采集的数据增加时间戳。
10.trig表示一个trigger,针对event、buffer而言,均需要结合trigger机制作为数据采集的信号,一般在trigger中将event信息、数据信息刷新到event的kfifo或者buffer中去。不过目前event信息一般没有使用trigger机制,大多数event信息均是在event irq的中断处理函数中push到event的kfifo中,虽然iio子系统设计上期望通过trigger将数据push到buffer或event上去,但event信息一般不是连续事件,且trigger内部又实现了虚拟的irq chip,而在虚拟irq的中断函数中实现数据push到buffer或者event的kfifo中。显然对于event信息处理而言,若使用trigger机制,则多了一个虚拟中断的触发与处理操作,完全没有必要,因此现有的系统中基本上没有使用trigger机制将event信息push到event kfifo的驱动。
11.pollfunc、pollfunc_event则为buffer、event的中断处理函数(使用的中断即为trigger中的virtual irq chip注册时irq)。
12.channels是该iio device所有channel的相关参数信息,iio_chan_spec中详细说明。
13.channel_attr_list包含了iio系统为所有channel创建的动态属性,类似于hwmon子系统,在sysfs下创建属性文件实现与iio device的通信,而channel_attr_list则主要是channel相关的属性集合。
14.groups中包含了所有的group指针,包括channel、event’buffer子模块创建的group,而在调用device_add将该iio device对应的struct device泪习惯变量注册到驱动模型子系统中,会遍历该数组,创建属性文件或目录。
15.setup_ops则主要是创建buffer与trigger的关联,在该ops中的enable接口中,主要是申请trigger的virtual irq chip提供的中断以及中断处理函数没在disable接口中释放中断。
设备中主要填充iio_dev的字段有以下:
1.modes; 2.dev; 3.event_interface;4.buffer; 5.available_scan_masks;6.trig; 7.pollfunc/pollfunc_event; 8.channels; 9.setup_ops;
2.struct iio_event_interface
对event子模块的定义。
37 struct iio_event_interface {38 wait_queue_head_t wait;39 DECLARE_KFIFO(det_events, struct iio_event_data, 16);4041 struct list_head dev_attr_list;42 unsigned long flags;43 struct attribute_group group;44 struct mutex read_lock;45 };1.wait等待队列,当应用程序读取触发事件信息时,若当前无数据可读,则将当前进程加入到该等待队列中,待调用iio_push_event将触发事件信息加到到kfifo后,则wakeup该队列中的进程。
2.定义kfifo,存储所有触发的时间信息,供应用程序获取。
3,将event子模块动态定义的event attribute均添加到dev_attr_list中。
4.flags标记该event是否已经使能,即应用程序是否通过ioctl调用创建一个匿名方式,若使能则置位IIO_BUSY_BIT_POS。
3.struct iio_buffer
描述存储连续采集数据的缓存。
98 struct iio_buffer {99 unsigned int length;
100 size_t bytes_per_datum;
101 struct attribute_group *scan_el_attrs;
102 long *scan_mask;
103 bool scan_timestamp;
104 const struct iio_buffer_access_funcs *access;
105 struct list_head scan_el_dev_attr_list;
106 struct attribute_group buffer_group;
107 struct attribute_group scan_el_group;
108 wait_queue_head_t pollq;
109 bool stufftoread;
110 const struct attribute **attrs;
111 struct list_head demux_list;
112 void *demux_bounce;
113 struct list_head buffer_list;
114 struct kref ref;
115 unsigned int watermark;
116 };1.length, iio_buffer缓存数据的个数。
2.bytes_per_datum,iio_buffer每一次采集数据的长度,bytes_per_datum * length即kfifo存储数据的内存大小。
3.scan_el_attrs存储各设备驱动自行定义的静态属性,该变量定义的属性文件在scan_elements子目录下。
4.scan_el_dev_attr_list主要用于将所有iio_buffer子模块创建的属性变量集合在一起。
5.attrs也是村纯设备驱动自行定义的静态属性,属性文件在buffer子目录下。
6.buffer_group、scan_el_group包含iio buffer子模块下所以的属性。
7.pollq为等待队列,主要为iio device的字符设备文件使用,该字符设备文件对应的读接口和poll接口使用,当buffer不存在数据时则sleep在该等待队列中。
8.watermark为缓存多少个数据后唤醒pollq。
9.iio_buffer_access_funcs是iio_buffer对应的缓存空间访问接口,目前使用kfifo缓存数据,其访问方法为iio_store_to_kfifo、iio_read_first_n_kfifo等,主要是将数据从kfifo中存储和取出。
4. struct iio_trigger和struct iio_trigger_ops
63 struct iio_trigger {64 const struct iio_trigger_ops *ops;65 int id;66 const char *name;67 struct device dev;6869 struct list_head list;70 struct list_head alloc_list;71 atomic_t use_count;7273 struct irq_chip subirq_chip;74 int subirq_base;7576 struct iio_subirq subirqs[CONFIG_IIO_CONSUMERS_PER_TRIGGER];77 unsigned long pool[BITS_TO_LONGS(CONFIG_IIO_CONSUMERS_PER_TRIGGER)];78 struct mutex pool_lock;79 bool attached_own_device;80 };36 struct iio_trigger_ops {37 struct module *owner;38 int (*set_trigger_state)(struct iio_trigger *trig, bool state);39 int (*try_reenable)(struct iio_trigger *trig);40 int (*validate_device)(struct iio_trigger *trig,41 struct iio_dev *indio_dev);42 };1.id表示trigger的id,name为名称。
2.dev,iio trigger也使用device变量加入到iio总线上,iio trigger与iio device均注册到iio总线上,因此它们在sysfs目录下是同级的。
3.list用于将struct iio_trigger添加到全局链表iio_trigger_list中。
4.alloc_list主要用于同一类的trigger可注册多个trigger实例的请求。
5.use_count,引用计数。
6.而subirq_chip、subirq_base、subirqs、pool则主要用于创建虚拟的irq chip,在trigger内部,当多个trigger consumer注册时,则trigger内部会为其分配一个虚拟的irq,并根据trigger consumer提供给pollfunc,为该irq注册中断处理函数,这样当该trigger触发后,则会遍历所有该trigger上已注册的虚拟irq,调用其中断处理函数从而执行trigger consumer提供的处理函数。
7.iio_trigger_ops是trigger操作接口。
5. struct iio_chan_spec
257 struct iio_chan_spec {
258 enum iio_chan_type type;
259 int channel;
260 int channel2;
261 unsigned long address;
262 int scan_index;
263 struct {
264 char sign;
265 u8 realbits;
266 u8 storagebits;
267 u8 shift;
268 u8 repeat;
269 enum iio_endian endianness;
270 } scan_type;
271 long info_mask_separate;
272 long info_mask_shared_by_type;
273 long info_mask_shared_by_dir;
274 long info_mask_shared_by_all;
275 const struct iio_event_spec *event_spec;
276 unsigned int num_event_specs;
277 const struct iio_chan_spec_ext_info *ext_info;
278 const char *extend_name;
279 const char *datasheet_name;
280 unsigned modified:1;
281 unsigned indexed:1;
282 unsigned output:1;
283 unsigned differential:1;
284 };1.type,该channel的类型,如IIO_TEMP、IIO_ACCEL等。
2.channel表示该channel的index,当indexed为1时,才使用该index表示channel里的属性参数。
3.channel2表示channel的别沉,当modified为1时,才则使用该index对应的string藐视channel。如针对三轴陀螺仪而言,如果还是用channel0、channel1进行识别的话不好区分,可使用channelX,channelY、channelZ等。
4.info_mask_separate表示channel的某一个属性为channel专属的。
5.info_mask_shared_by_type则表示该iio device下所有相同类型的channel所共享的属性。
6.info_mask_shared_by_dir表示该iio device下所有相同方向channel所共享的属性。
7.info_mask_shared_by_all表示该iio device下所有channel所共享的属性。
8.scan_index、scan_type表示采集数据的index以及数据的类型等。
9.event_spac定义event相关的信息。
6. struct iio_info
382 struct iio_info {
383 struct module *driver_module;
384 struct attribute_group *event_attrs;
385 const struct attribute_group *attrs;
386
387 int (*read_raw)(struct iio_dev *indio_dev,
388 struct iio_chan_spec const *chan,
389 int *val,
390 int *val2,
391 long mask);
392
393 int (*read_raw_multi)(struct iio_dev *indio_dev,
394 struct iio_chan_spec const *chan,
395 int max_len,
396 int *vals,
397 int *val_len,
398 long mask);
399
400 int (*write_raw)(struct iio_dev *indio_dev,
401 struct iio_chan_spec const *chan,
402 int val,
403 int val2,
404 long mask);
405
406 int (*write_raw_get_fmt)(struct iio_dev *indio_dev,
407 struct iio_chan_spec const *chan,
408 long mask);
409
410 int (*read_event_config)(struct iio_dev *indio_dev,
411 const struct iio_chan_spec *chan,
412 enum iio_event_type type,
413 enum iio_event_direction dir);
414
415 int (*write_event_config)(struct iio_dev *indio_dev,
416 const struct iio_chan_spec *chan,
417 enum iio_event_type type,
418 enum iio_event_direction dir,
419 int state);
420
421 int (*read_event_value)(struct iio_dev *indio_dev,
422 const struct iio_chan_spec *chan,
423 enum iio_event_type type,
424 enum iio_event_direction dir,
425 enum iio_event_info info, int *val, int *val2);
426
427 int (*write_event_value)(struct iio_dev *indio_dev,
428 const struct iio_chan_spec *chan,
429 enum iio_event_type type,
430 enum iio_event_direction dir,
431 enum iio_event_info info, int val, int val2);
432
433 int (*validate_trigger)(struct iio_dev *indio_dev,
434 struct iio_trigger *trig);
435 int (*update_scan_mode)(struct iio_dev *indio_dev,
436 const unsigned long *scan_mask);
437 int (*debugfs_reg_access)(struct iio_dev *indio_dev,
438 unsigned reg, unsigned writeval,
439 unsigned *readval);
440 int (*of_xlate)(struct iio_dev *indio_dev,
441 const struct of_phandle_args *iiospec);
442 int (*hwfifo_set_watermark)(struct iio_dev *indio_dev, unsigned val);
443 int (*hwfifo_flush_to_buffer)(struct iio_dev *indio_dev,
444 unsigned count);
445 };该数据结构主要定义了通过syfs读写channel属性的接口,其中read_raw、write_raw可用于读取通道的raw数据等;而write_event_value则主要用于event事件触发的阈值参数的设置与读取等、而read_event_config、write_event_config则可以用于实现event的使能与否;而event_attrs、attrs则主要用于设备驱动自定义的属性参数(包括event属性参数以及iio device相关的属性参数)
下面我们来看看inv_mpu6050这个驱动是怎么实现的。
inv_mpu6050驱动分析
整个驱动我们主要挑了以下几个方面来看:
1.重要的数据结构是怎么填充以及所调用的接口。
2.数据是如何采集上报的。
probe中的数据结构填充
我们来看i2c设备下的probe,源码在:drivers/iio/imu/inv_mpu6050目录下。我们只关注与iio相关的代码
92 static int inv_mpu_probe(struct i2c_client *client,93 const struct i2c_device_id *id)94 {95 struct inv_mpu6050_state *st;96 int result, chip_type;97 struct regmap *regmap;98 const char *name;……
122 result = inv_mpu_core_probe(regmap, client->irq, name,
123 NULL, chip_type);
124 if (result < 0)
125 return result;
126
127 st = iio_priv(dev_get_drvdata(&client->dev));……
144
145 return 0;
152 }inv_mpu_probe方法与iio相关的操作都在inv_mpu_core_probe中,iio_priv方法是从iio_dev地址上获取到私有数据。
846 int inv_mpu_core_probe(struct regmap *regmap, int irq, const char *name,
847 int (*inv_mpu_bus_setup)(struct iio_dev *), int chip_type)
848 {
849 struct inv_mpu6050_state *st;
850 struct iio_dev *indio_dev;
851 struct inv_mpu6050_platform_data *pdata;
852 struct device *dev = regmap_get_device(regmap);
853 int result;
854
855 indio_dev = devm_iio_device_alloc(dev, sizeof(*st));
856 if (!indio_dev)
857 return -ENOMEM;
858……
899 indio_dev->dev.parent = dev;
900 /* name will be NULL when enumerated via ACPI */
901 if (name)
902 indio_dev->name = name;
903 else
904 indio_dev->name = dev_name(dev);
905 indio_dev->channels = inv_mpu_channels;
906 indio_dev->num_channels = ARRAY_SIZE(inv_mpu_channels);
907
908 indio_dev->info = &mpu_info;
909 indio_dev->modes = INDIO_BUFFER_TRIGGERED;
910
911 result = iio_triggered_buffer_setup(indio_dev,
912 inv_mpu6050_irq_handler,
913 inv_mpu6050_read_fifo,
914 NULL);
915 if (result) {
916 dev_err(dev, "configure buffer fail %d\n", result);
917 return result;
918 }
919 result = inv_mpu6050_probe_trigger(indio_dev);
920 if (result) {
921 dev_err(dev, "trigger probe fail %d\n", result);
922 goto out_unreg_ring;
923 }
924
925 INIT_KFIFO(st->timestamps);
926 spin_lock_init(&st->time_stamp_lock);
927 result = iio_device_register(indio_dev);
928 if (result) {
929 dev_err(dev, "IIO register fail %d\n", result);
930 goto out_remove_trigger;
931 }
932
933 return 0;
934
935 out_remove_trigger:
936 inv_mpu6050_remove_trigger(st);
937 out_unreg_ring:
938 iio_triggered_buffer_cleanup(indio_dev);
939 return result;
940 }1.devm_iio_device_alloc,用于创建构造iio_dev变量,同时初始化了iio_dev->dev变量,设备的名字是"iio:device%d"格式。
2.indio_dev->dev.parent = dev,此处dev是i2c子设备的device。
3.indio_dev->channels = inv_mpu_channels; && indio_dev->num_channels = ARRAY_SIZE(inv_mpu_channels); iio_chan_spec的填充如下:
714 #define INV_MPU6050_CHAN(_type, _channel2, _index) \
715 { \
716 .type = _type, \
717 .modified = 1, \
718 .channel2 = _channel2, \
719 .info_mask_shared_by_type = BIT(IIO_CHAN_INFO_SCALE), \
720 .info_mask_separate = BIT(IIO_CHAN_INFO_RAW) | \
721 BIT(IIO_CHAN_INFO_CALIBBIAS), \
722 .scan_index = _index, \
723 .scan_type = { \
724 .sign = 's', \
725 .realbits = 16, \
726 .storagebits = 16, \
727 .shift = 0, \
728 .endianness = IIO_BE, \
729 }, \
730 .ext_info = inv_ext_info, \
731 }
732
733 static const struct iio_chan_spec inv_mpu_channels[] = {
734 IIO_CHAN_SOFT_TIMESTAMP(INV_MPU6050_SCAN_TIMESTAMP),
735 /*
736 * Note that temperature should only be via polled reading only,
737 * not the final scan elements output.
738 */
739 {
740 .type = IIO_TEMP,
741 .info_mask_separate = BIT(IIO_CHAN_INFO_RAW)
742 | BIT(IIO_CHAN_INFO_OFFSET)
743 | BIT(IIO_CHAN_INFO_SCALE),
744 .scan_index = -1,
745 },
746 INV_MPU6050_CHAN(IIO_ANGL_VEL, IIO_MOD_X, INV_MPU6050_SCAN_GYRO_X),
747 INV_MPU6050_CHAN(IIO_ANGL_VEL, IIO_MOD_Y, INV_MPU6050_SCAN_GYRO_Y),
748 INV_MPU6050_CHAN(IIO_ANGL_VEL, IIO_MOD_Z, INV_MPU6050_SCAN_GYRO_Z),
749
750 INV_MPU6050_CHAN(IIO_ACCEL, IIO_MOD_X, INV_MPU6050_SCAN_ACCL_X),
751 INV_MPU6050_CHAN(IIO_ACCEL, IIO_MOD_Y, INV_MPU6050_SCAN_ACCL_Y),
752 INV_MPU6050_CHAN(IIO_ACCEL, IIO_MOD_Z, INV_MPU6050_SCAN_ACCL_Z),
753 };共有8个channel,分别是IIO_TIMESTAMP(表示虚拟通道-时间戳)、IIO_TEMP(温度)、3个IIO_ANGL_VEL(角度传感器3个轴)和3个IIO_ACCEL(加速度传感器3个轴)。6轴的channel使用宏INV_MPU6050_CHAN来定义,表明他们的参数基本一致。
4.indio_dev->info = &mpu_info;
784 static const struct iio_info mpu_info = {
785 .driver_module = THIS_MODULE,
786 .read_raw = &inv_mpu6050_read_raw,
787 .write_raw = &inv_mpu6050_write_raw,
788 .write_raw_get_fmt = &inv_write_raw_get_fmt,
789 .attrs = &inv_attribute_group,
790 .validate_trigger = inv_mpu6050_validate_trigger,
791 };5.indio_dev->modes = INDIO_BUFFER_TRIGGERED;inv_mpu6050只使用了buffer trigger这种模式。
6.iio_triggered_buffer_setup,创建kfifo和iio_buffer_setup_ops,是iio的标准接口。
44 int iio_triggered_buffer_setup(struct iio_dev *indio_dev,45 irqreturn_t (*h)(int irq, void *p),46 irqreturn_t (*thread)(int irq, void *p),47 const struct iio_buffer_setup_ops *setup_ops)48 {49 struct iio_buffer *buffer;50 int ret;5152 buffer = iio_kfifo_allocate();53 if (!buffer) {54 ret = -ENOMEM;55 goto error_ret;56 }5758 iio_device_attach_buffer(indio_dev, buffer);5960 indio_dev->pollfunc = iio_alloc_pollfunc(h,61 thread,62 IRQF_ONESHOT,63 indio_dev,64 "%s_consumer%d",65 indio_dev->name,66 indio_dev->id);67 if (indio_dev->pollfunc == NULL) {68 ret = -ENOMEM;69 goto error_kfifo_free;70 }7172 /* Ring buffer functions - here trigger setup related */73 if (setup_ops)74 indio_dev->setup_ops = setup_ops;75 else76 indio_dev->setup_ops = &iio_triggered_buffer_setup_ops;7778 /* Flag that polled ring buffering is possible */79 indio_dev->modes |= INDIO_BUFFER_TRIGGERED;8081 return 0;8283 error_kfifo_free:84 iio_kfifo_free(indio_dev->buffer);85 error_ret:86 return ret;87 }iio_kfifo_allocate创建了iio_buffer,并未iio_buffer填充了access和length字段,length默认为2。iio_device_attach_buffer将创建的iio_buffer与iio_dev关联起来。函数参数h和thread分别是irq的上半部和下半部,并调用iio_alloc_pollfunc生成pollfunc。iio_dev的setup_ops,如果传参为NULL,则使用默认的参数&iio_triggered_buffer_setup_ops。
7.inv_mpu6050_probe_trigger,调用devm_iio_trigger_alloc申请注册trigger的virtual irq,并调用iio_trigger_register注册trigger。
8.完成以上准备操作后,注册iio_dev,调用iio_device_register进行注册。
以上是iio设备驱动probe所做的事情,这样看起来probe做的事情并不多,实际上大部分的sysfs节点和chrdev的注册都是有iio core实现的。下面我们主要分析iio的核心框架是怎么做的。
iio_buffer
iio_device_register方法为iio设备驱动创建了buffer和channel的sysfs。
1478 int iio_device_register(struct iio_dev *indio_dev)
1479 {
1480 int ret;
1481
1482 /* If the calling driver did not initialize of_node, do it here */
1483 if (!indio_dev->dev.of_node && indio_dev->dev.parent)
1484 indio_dev->dev.of_node = indio_dev->dev.parent->of_node;
1485 // channels scan_index不能有重复
1486 ret = iio_check_unique_scan_index(indio_dev);
1487 if (ret < 0)
1488 return ret;
1489
1490 /* configure elements for the chrdev */
1491 indio_dev->dev.devt = MKDEV(MAJOR(iio_devt), indio_dev->id);
1492
1493 ret = iio_device_register_debugfs(indio_dev);
1494 if (ret) {
1495 dev_err(indio_dev->dev.parent,
1496 "Failed to register debugfs interfaces\n");
1497 return ret;
1498 }
1499 // 创建buffer和scan_elements下的属性节点
1500 ret = iio_buffer_alloc_sysfs_and_mask(indio_dev);
1501 if (ret) {
1502 dev_err(indio_dev->dev.parent,
1503 "Failed to create buffer sysfs interfaces\n");
1504 goto error_unreg_debugfs;
1505 }
1506 // 创建channel的属性节点。
1507 ret = iio_device_register_sysfs(indio_dev);
1508 if (ret) {
1509 dev_err(indio_dev->dev.parent,
1510 "Failed to register sysfs interfaces\n");
1511 goto error_buffer_free_sysfs;
1512 }
1513 ret = iio_device_register_eventset(indio_dev); //创建events的属性节点
1514 if (ret) {
1515 dev_err(indio_dev->dev.parent,
1516 "Failed to register event set\n");
1517 goto error_free_sysfs;
1518 }
1519 if (indio_dev->modes & (INDIO_BUFFER_TRIGGERED | INDIO_EVENT_TRIGGERED))
1520 iio_device_register_trigger_consumer(indio_dev); //创建trigger属性节点
1521
1522 if ((indio_dev->modes & INDIO_ALL_BUFFER_MODES) &&
1523 indio_dev->setup_ops == NULL)
1524 indio_dev->setup_ops = &noop_ring_setup_ops;
1525 // 创建字符设备节点,fops操作绑定iio_buffer
1526 cdev_init(&indio_dev->chrdev, &iio_buffer_fileops);
1527 indio_dev->chrdev.owner = indio_dev->info->driver_module;
1528 indio_dev->chrdev.kobj.parent = &indio_dev->dev.kobj;
1529 ret = cdev_add(&indio_dev->chrdev, indio_dev->dev.devt, 1);
1530 if (ret < 0)
1531 goto error_unreg_eventset;
1532
1533 ret = device_add(&indio_dev->dev);
1534 if (ret < 0)
1535 goto error_cdev_del;
1536
1537 return 0;
1538 error_cdev_del:
1539 cdev_del(&indio_dev->chrdev);
1540 error_unreg_eventset:
1541 iio_device_unregister_eventset(indio_dev);
1542 error_free_sysfs:
1543 iio_device_unregister_sysfs(indio_dev);
1544 error_buffer_free_sysfs:
1545 iio_buffer_free_sysfs_and_mask(indio_dev);
1546 error_unreg_debugfs:
1547 iio_device_unregister_debugfs(indio_dev);
1548 return ret;
1549 }iio_device_register过程中,为iio_dev创建了其所需的sysfs节点,主要包括buffer、channels、debug、event和trigger等模块的节点。我们主要分析一下buffer这个核心模块的sysfs节点和iio_buffer的创建过程,了解使能/失能 buffer/enable时iio框架究竟做了些什么。
1064 int iio_buffer_alloc_sysfs_and_mask(struct iio_dev *indio_dev)
1065 {……
1090 attr = kcalloc(attrcount + ARRAY_SIZE(iio_buffer_attrs) + 1,
1091 sizeof(struct attribute *), GFP_KERNEL);
1092 if (!attr)
1093 return -ENOMEM;
1094
1095 memcpy(attr, iio_buffer_attrs, sizeof(iio_buffer_attrs));
1096 if (!buffer->access->set_length)
1097 attr[0] = &dev_attr_length_ro.attr;
1098
1099 if (buffer->access->flags & INDIO_BUFFER_FLAG_FIXED_WATERMARK)
1100 attr[2] = &dev_attr_watermark_ro.attr;
1101
1102 if (buffer->attrs)
1103 memcpy(&attr[ARRAY_SIZE(iio_buffer_attrs)], buffer->attrs,
1104 sizeof(struct attribute *) * attrcount);
1105
1106 attr[attrcount + ARRAY_SIZE(iio_buffer_attrs)] = NULL;
1107
1108 buffer->buffer_group.name = "buffer";
1109 buffer->buffer_group.attrs = attr;……
1174 }kfifo的创建/释放
buffer的enable/length/watermark是常规必备的attr,enable节点所对应的show/store方法分别对应了iio_buffer_show_enable/iio_buffer_store_enable,show方法我们无需关注,主要关注store方法:
966 static ssize_t iio_buffer_store_enable(struct device *dev,967 struct device_attribute *attr,968 const char *buf,969 size_t len)970 {971 int ret;972 bool requested_state;973 struct iio_dev *indio_dev = dev_to_iio_dev(dev);974 bool inlist;975976 ret = strtobool(buf, &requested_state);977 if (ret < 0)978 return ret;979980 mutex_lock(&indio_dev->mlock);981982 /* Find out if it is in the list */983 inlist = iio_buffer_is_active(indio_dev->buffer);984 /* Already in desired state */985 if (inlist == requested_state)986 goto done;987 // 当enable为1时,insert_buffer为indio_dev->buffer,表示将这个buffer插入到列表中,否则就移除它988 if (requested_state)989 ret = __iio_update_buffers(indio_dev,990 indio_dev->buffer, NULL);991 else992 ret = __iio_update_buffers(indio_dev,993 NULL, indio_dev->buffer);994995 done:996 mutex_unlock(&indio_dev->mlock);997 return (ret < 0) ? ret : len;998 } 869 static int __iio_update_buffers(struct iio_dev *indio_dev,870 struct iio_buffer *insert_buffer,871 struct iio_buffer *remove_buffer)872 {873 struct iio_device_config new_config;874 int ret;875876 ret = iio_verify_update(indio_dev, insert_buffer, remove_buffer,877 &new_config);878 if (ret)879 return ret;880 // 申请创建kfifo,计算kfifo的容量与每次数据的大小881 if (insert_buffer) {882 ret = iio_buffer_request_update(indio_dev, insert_buffer);883 if (ret)884 goto err_free_config;885 }886887 ret = iio_disable_buffers(indio_dev);888 if (ret)889 goto err_deactivate_all;890 // 移除/添加buffer列表,目前看来,buffer_list只有一个buffer891 if (remove_buffer)892 iio_buffer_deactivate(remove_buffer);893 if (insert_buffer)894 iio_buffer_activate(indio_dev, insert_buffer);895896 /* If no buffers in list, we are done */897 if (list_empty(&indio_dev->buffer_list))898 return 0;899 // 更新 iio_buffer的配置信息。900 ret = iio_enable_buffers(indio_dev, &new_config);901 if (ret)902 goto err_deactivate_all;903904 return 0;iio_buffer_request_update是创建看kfifo的重心,这里进行了两个操作:①iio_buffer_update_bytes_per_datum,计算每次数据上报的大小。②申请kfifo的空间。
545 static int iio_compute_scan_bytes(struct iio_dev *indio_dev,546 const unsigned long *mask, bool timestamp)547 {548 unsigned bytes = 0;549 int length, i;550551 /* How much space will the demuxed element take? */552 for_each_set_bit(i, mask,553 indio_dev->masklength) {554 length = iio_storage_bytes_for_si(indio_dev, i);555 bytes = ALIGN(bytes, length);556 bytes += length;557 }558559 if (timestamp) {560 length = iio_storage_bytes_for_timestamp(indio_dev);561 bytes = ALIGN(bytes, length);562 bytes += length;563 }564 return bytes;565 }每次上报的数据大小并不是完全根据channels中指定的storagebits来计算,而是还是数据的对齐。ALIGN是一个宏,展开后核心如下:
(((x) + (mask)) & ~(mask))x就是第一个参数,mask是第二个参数-1。例如一次使能了4个channels,前三个channel的storagebits为2bytes,第四个channel为4bytes。那么最后bytes的值就是12.
计算过程如下:
channel0:length = 2; bytes = (0 + 2) &(~1) + 2 = 2
channel1:length = 2; bytes = (2 + 2) & (~1) + 2 = 4
channel2:length = 2; bytes = (4 + 2) & (~1) + 2 = 6
channel3:length = 4; bytes = (6 + 4) & (~3) + 4 = 12这个值最后被设置到iio_buffer的bytes_per_datum字段中。然后在iio_buffer的request_update操作中进行kfifo的申请。
38 static int iio_request_update_kfifo(struct iio_buffer *r)39 {40 int ret = 0;41 struct iio_kfifo *buf = iio_to_kfifo(r);4243 mutex_lock(&buf->user_lock);44 if (buf->update_needed) {45 kfifo_free(&buf->kf);46 ret = __iio_allocate_kfifo(buf, buf->buffer.bytes_per_datum,47 buf->buffer.length);48 if (ret >= 0)49 buf->update_needed = false;50 } else {51 kfifo_reset_out(&buf->kf);52 }53 mutex_unlock(&buf->user_lock);5455 return ret;56 }38 int __kfifo_alloc(struct __kfifo *fifo, unsigned int size,39 size_t esize, gfp_t gfp_mask)40 {41 /*42 * round down to the next power of 2, since our 'let the indices43 * wrap' technique works only in this case.44 */45 size = roundup_pow_of_two(size);4647 fifo->in = 0;48 fifo->out = 0;49 fifo->esize = esize;5051 if (size < 2) {52 fifo->data = NULL;53 fifo->mask = 0;54 return -EINVAL;55 }5657 fifo->data = kmalloc(size * esize, gfp_mask);5859 if (!fifo->data) {60 fifo->mask = 0;61 return -ENOMEM;62 }63 fifo->mask = size - 1;6465 return 0;66 }kfifo的esize就是iio_buffer的bytes_per_datum。fifo的data内存大小就是iio_buffer->length * iio_buffer->bytes_per_datum.
而当enable为0时,则简单得多了,只需要释放kfifo:
574 static void iio_buffer_deactivate(struct iio_buffer *buffer)575 {576 list_del_init(&buffer->buffer_list);577 wake_up_interruptible(&buffer->pollq);578 iio_buffer_put(buffer);579 }69 void __kfifo_free(struct __kfifo *fifo)70 {71 kfree(fifo->data);72 fifo->in = 0;73 fifo->out = 0;74 fifo->esize = 0;75 fifo->data = NULL;76 fifo->mask = 0;77 }kfifo的in/out
前面说完kfifo的创建,而kfifo的数据写入和读取我们在inv_mpu6050驱动中再展开分析。
数据上报/读取

inv_mpu6050的trigger是通过中断来触发的。当mpu数据采集完成后,触发irq,调用iio_trigger_generic_data_rdy_poll这个中断,iio trigger触发其创建的虚拟中断来回调iio_dev的pollfunc,并进入到我们定义的pollfunc中采集数据,并通过iio_push_to_buffer接口将数据store到kfifo中。
本节的重点是iio trigger的触发过程和iio_push_to_buffer将数据store到kfifo的过程细节。
trigger的触发
trigger默认是没有打开的,trigger的使能/关闭都与buffer的使能/关闭挂钩。在iio_buffer小节中,iio_buffer的使能/失能会调用iio_enable_buffers/iio_disable_buffers去,在这两个操作中,会顺带控制了trigger的使能/关闭。
755 static int iio_enable_buffers(struct iio_dev *indio_dev,756 struct iio_device_config *config)757 {……801 if (indio_dev->setup_ops->postenable) {802 ret = indio_dev->setup_ops->postenable(indio_dev);803 if (ret) {804 dev_dbg(&indio_dev->dev,805 "Buffer not started: postenable failed (%d)\n", ret);806 goto err_disable_buffers;807 }808 } 826 static int iio_disable_buffers(struct iio_dev *indio_dev)827 { ……857 if (indio_dev->setup_ops->postdisable) {858 ret2 = indio_dev->setup_ops->postdisable(indio_dev);859 if (ret2 && !ret)860 ret = ret2;861 }setup_ops中默认是iio_triggered_buffer_setup_ops,这个也是mpu6050中所使用的。
19 static const struct iio_buffer_setup_ops iio_triggered_buffer_setup_ops = {20 .postenable = &iio_triggered_buffer_postenable,21 .predisable = &iio_triggered_buffer_predisable,22 };245 static int iio_trigger_attach_poll_func(struct iio_trigger *trig,
246 struct iio_poll_func *pf)
247 {
248 int ret = 0;
249 bool notinuse
250 = bitmap_empty(trig->pool, CONFIG_IIO_CONSUMERS_PER_TRIGGER);
251
252 /* Prevent the module from being removed whilst attached to a trigger */
253 __module_get(pf->indio_dev->info->driver_module);
254
255 /* Get irq number */
256 pf->irq = iio_trigger_get_irq(trig);
257 if (pf->irq < 0)
258 goto out_put_module;
259
260 /* Request irq */
261 ret = request_threaded_irq(pf->irq, pf->h, pf->thread,
262 pf->type, pf->name,
263 pf);
264 if (ret < 0)
265 goto out_put_irq;
266
267 /* Enable trigger in driver */
268 if (trig->ops->set_trigger_state && notinuse) {
269 ret = trig->ops->set_trigger_state(trig, true);
270 if (ret < 0)
271 goto out_free_irq;
272 }iio_trigger_get_irq返回trigger所使用的虚拟中断号,调用request_threaded_irq向系统注册这个虚拟中断,pf就是probe中的inv_mpu6050_irq_handler/inv_mpu6050_read_fifo.
predisable则更简单,直接free_irq。
虚拟中断已经创建好,那么剩下的就是软件触发,而iio_trigger_poll就是触发这个中断的接口。
166 void iio_trigger_poll(struct iio_trigger *trig)
167 {
168 int i;
169
170 if (!atomic_read(&trig->use_count)) {
171 atomic_set(&trig->use_count, CONFIG_IIO_CONSUMERS_PER_TRIGGER);
172
173 for (i = 0; i < CONFIG_IIO_CONSUMERS_PER_TRIGGER; i++) {
174 if (trig->subirqs[i].enabled)
175 generic_handle_irq(trig->subirq_base + i);
176 else
177 iio_trigger_notify_done(trig);
178 }
179 }
180 }generic_handle_irq是irq子系统的接口,在这里不再展开。此时就可以回调到我们设备驱动中的回调。
iio_push_to_buffer
iio_push_to_buffer是往kfifo写入数据:
1245 static int iio_push_to_buffer(struct iio_buffer *buffer, const void *data)
1246 {
1247 const void *dataout = iio_demux(buffer, data);
1248 int ret;
1249
1250 ret = buffer->access->store_to(buffer, dataout);
1251 if (ret)
1252 return ret;
1253
1254 /*
1255 * We can't just test for watermark to decide if we wake the poll queue
1256 * because read may request less samples than the watermark.
1257 */
1258 wake_up_interruptible_poll(&buffer->pollq, POLLIN | POLLRDNORM);
1259 return 0;
1260 }store_to是kfifo的iio_store_to_kfifo:
86 static int iio_store_to_kfifo(struct iio_buffer *r,87 const void *data)88 {89 int ret;90 struct iio_kfifo *kf = iio_to_kfifo(r);91 ret = kfifo_in(&kf->kf, data, 1);92 if (ret != 1)93 return -EBUSY;94 return 0;95 }
126 unsigned int __kfifo_in(struct __kfifo *fifo,
127 const void *buf, unsigned int len)
128 {
129 unsigned int l;
130
131 l = kfifo_unused(fifo);
132 if (len > l)
133 len = l;
134
135 kfifo_copy_in(fifo, buf, len, fifo->in);
136 fifo->in += len;
137 return len;
138 }
102 static void kfifo_copy_in(struct __kfifo *fifo, const void *src,
103 unsigned int len, unsigned int off)
104 {
105 unsigned int size = fifo->mask + 1;
106 unsigned int esize = fifo->esize;
107 unsigned int l;
108
109 off &= fifo->mask;
110 if (esize != 1) {
111 off *= esize;
112 size *= esize;
113 len *= esize;
114 }
115 l = min(len, size - off);
116
117 memcpy(fifo->data + off, src, l);
118 memcpy(fifo->data, src + l, len - l);
119 /*
120 * make sure that the data in the fifo is up to date before
121 * incrementing the fifo->in index counter
122 */
123 smp_wmb();
124 }kfifo_copy_in每次copy的字节数是esize,因此iio_push_to_buffer接口参数并没有传入大小,只传入了指针,因为每次store_to都是固定的大小,因此data所指向的数据必须不能小于esize的大小,esize就是前面kfifo的创建中根据channel的storagebits的大小并对齐后的大小。
store_to之后就是唤醒poll的等待.
数据读取
这里的数据读取是指通过chrdev节点读取的方式。在前面iio_device_register方法中可以看到,chrdev的fops是iio_buffer_fileops,里面提供了read和poll的接口方法。我们这里只看一下read接口:
105 ssize_t iio_buffer_read_first_n_outer(struct file *filp, char __user *buf,106 size_t n, loff_t *f_ps)107 {108 struct iio_dev *indio_dev = filp->private_data;109 struct iio_buffer *rb = indio_dev->buffer;110 DEFINE_WAIT_FUNC(wait, woken_wake_function);111 size_t datum_size;112 size_t to_wait;113 int ret = 0;114115 if (!indio_dev->info)116 return -ENODEV;117118 if (!rb || !rb->access->read_first_n)119 return -EINVAL;120121 datum_size = rb->bytes_per_datum;122123 /*124 * If datum_size is 0 there will never be anything to read from the125 * buffer, so signal end of file now.126 */127 if (!datum_size)128 return 0;129130 if (filp->f_flags & O_NONBLOCK)131 to_wait = 0;132 else133 to_wait = min_t(size_t, n / datum_size, rb->watermark);134135 add_wait_queue(&rb->pollq, &wait);136 do {137 if (!indio_dev->info) {138 ret = -ENODEV;139 break;140 }141142 if (!iio_buffer_ready(indio_dev, rb, to_wait, n / datum_size)) {143 if (signal_pending(current)) {144 ret = -ERESTARTSYS;145 break;146 }147148 wait_woken(&wait, TASK_INTERRUPTIBLE,149 MAX_SCHEDULE_TIMEOUT);150 continue;151 }152153 ret = rb->access->read_first_n(rb, n, buf);154 if (ret == 0 && (filp->f_flags & O_NONBLOCK))155 ret = -EAGAIN;156 } while (ret == 0);157 remove_wait_queue(&rb->pollq, &wait);158159 return ret;160 }如果open是传入的参数是O_NONBLOCK,则不用等待,否则会根据read的size/bytes_per_datum和watermark的最小值来判断返回时机。当有足够数据足以返回时,则调用kfifo的read_first_n接口取读取数据:
97 static int iio_read_first_n_kfifo(struct iio_buffer *r,98 size_t n, char __user *buf)99 {
100 int ret, copied;
101 struct iio_kfifo *kf = iio_to_kfifo(r);
102
103 if (mutex_lock_interruptible(&kf->user_lock))
104 return -ERESTARTSYS;
105
106 if (!kfifo_initialized(&kf->kf) || n < kfifo_esize(&kf->kf))
107 ret = -EINVAL;
108 else
109 ret = kfifo_to_user(&kf->kf, buf, n, &copied);
110 mutex_unlock(&kf->user_lock);
111 if (ret < 0)
112 return ret;
113
114 return copied;
115 }这里要注意一点,当read的size小于esize,那么read就会被返回-EINVAL,由于iio认为每次读取数据都必须大于一个完整的数据。
283 int __kfifo_to_user(struct __kfifo *fifo, void __user *to,
284 unsigned long len, unsigned int *copied)
285 {
286 unsigned int l;
287 unsigned long ret;
288 unsigned int esize = fifo->esize;
289 int err;
290
291 if (esize != 1)
292 len /= esize;
293
294 l = fifo->in - fifo->out;
295 if (len > l)
296 len = l;
297 ret = kfifo_copy_to_user(fifo, to, len, fifo->out, copied);
298 if (unlikely(ret)) {
299 len -= ret;
300 err = -EFAULT;
301 } else
302 err = 0;
303 fifo->out += len;
304 return err;
305 }
249 static unsigned long kfifo_copy_to_user(struct __kfifo *fifo, void __user *to,
250 unsigned int len, unsigned int off, unsigned int *copied)
251 {
252 unsigned int l;
253 unsigned long ret;
254 unsigned int size = fifo->mask + 1;
255 unsigned int esize = fifo->esize;
256
257 off &= fifo->mask;
258 if (esize != 1) {
259 off *= esize;
260 size *= esize;
261 len *= esize;
262 }
263 l = min(len, size - off);
264
265 ret = copy_to_user(to, fifo->data + off, l);
266 if (unlikely(ret))
267 ret = DIV_ROUND_UP(ret + len - l, esize);
268 else {
269 ret = copy_to_user(to + l, fifo->data, len - l);
270 if (unlikely(ret))
271 ret = DIV_ROUND_UP(ret, esize);
272 }
273 /*
274 * make sure that the data is copied before
275 * incrementing the fifo->out index counter
276 */
277 smp_wmb();
278 *copied = len - ret * esize;
279 /* return the number of elements which are not copied */
280 return ret;
281 }就这样,用户空间就可以完成数据的读取。
iio子系统用户空间
iio子系统提供了很多的sysfs节点供用户去配置/操作iio设备。操作iio设备主要关注一个目录和一个节点:
目录就是/sys/bus/iio/devices/iio:deviceX,这个是iio的sysfs节点所在的目录,节点就是/dev/iio:deviceX,这个是iio字符设备驱动节点。
一般操作步骤:
1.或者iio设备驱动的信息,如channel的index、type(数据的类型/大小/偏移等信息),这部分在scan_elements子目录下;in_xxxx_scale信息,各个设备的scale信息,这个关乎数据计算;sampling_frequency,这个名字不固定,一般都会提供一个设置频率的节点。
1.设置channel使能,节点名一般是in_xxxx_x_en,在scan_elements子目录下。
2.设置频率。
3.使能buffer,节点在buffer/enable下,也可以设置buffer的length和watermark,但一般无需设置。
4.读取/dev/iio:deviceX节点,如cat /dev/iio:device0 | xxd -c 2。
5.根据channel信息来获取数据,并根据scale来换算单位。
iio还提供单独单次获取一个channel的数据,如in_xxxx_x_raw节点,cat这个节点即可获取这个channel的数据。
另外,iio为了数据的安全,所有的设置都必须在buffer/enable为0的状态下进行设置。









![Apache Kudo: 1.0版和未来 [session]](https://img-blog.csdnimg.cn/img_convert/a84cb36325c24b39dbcfe69b0a9a343c.png)