1.结果展示
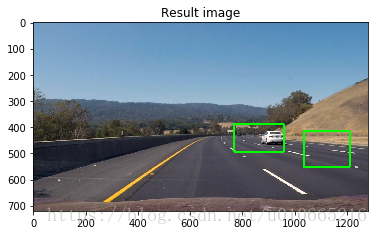
系统采用YoloV4检测车辆目标,对有效车辆检测框进行跟踪匹配,检测结果示意图如下:

检测结果视频为:基于YoloV4的车辆检测跟踪系统_哔哩哔哩_bilibili
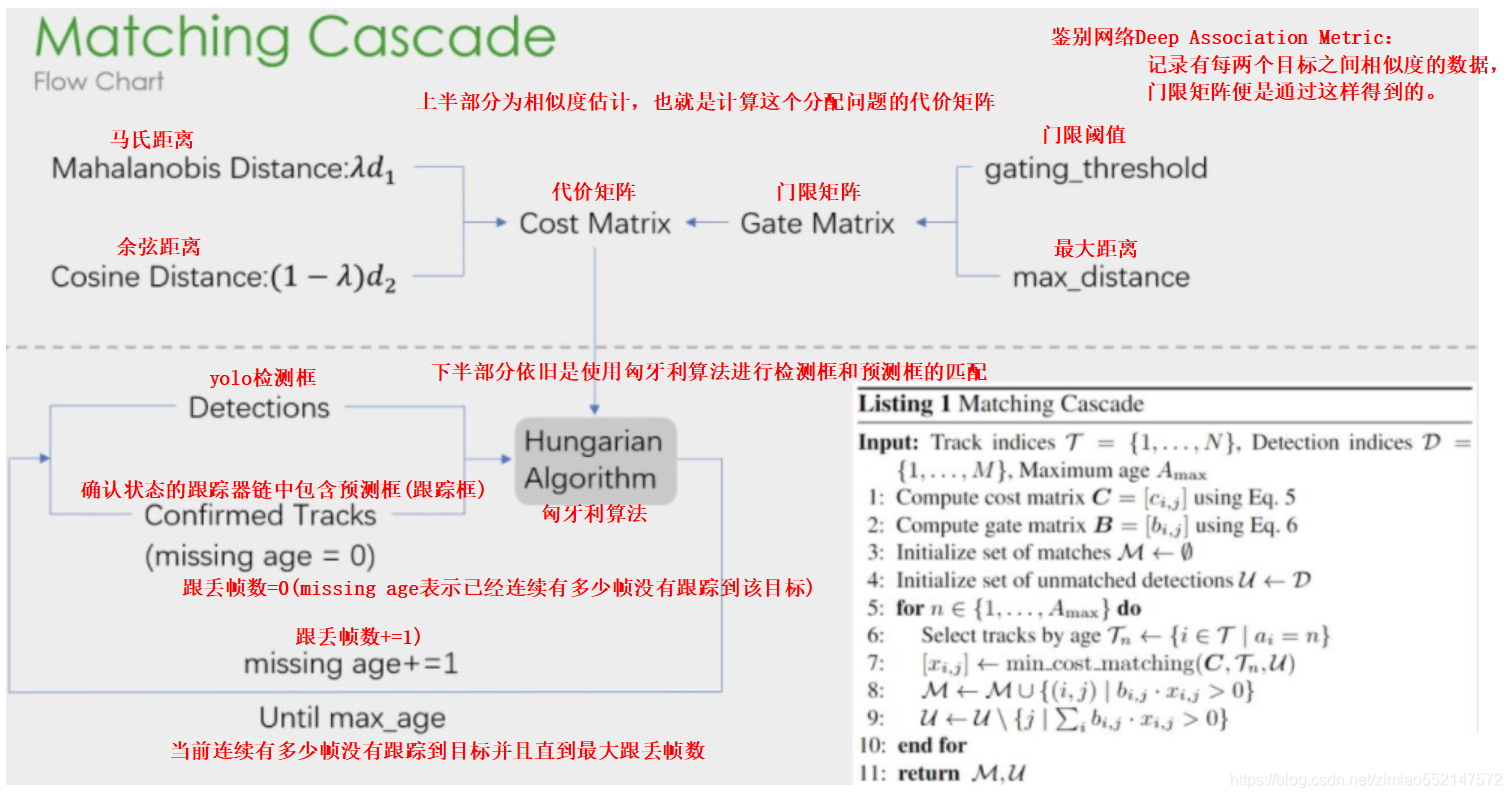
2.系统工作流程
工作流程图如下:

检测跟踪系统性能:
经测试在白天高速公路场景下跟踪准确率≥99%。夜间测试结果后续补齐。
最耗时环节为YoloV4对图像进行目标检测的环节,不同显卡性能的耗时不同,详细可查yolov4的各平台测试。跟踪环节仅采用简单的基于检测框的匹配,耗时可以忽略不记。
系统采用YoloV4检测车辆目标,对有效车辆检测框进行跟踪匹配,检测结果示意图如下:
检测结果视频为:基于YoloV4的车辆检测跟踪系统_哔哩哔哩_bilibili
工作流程图如下:
检测跟踪系统性能:
经测试在白天高速公路场景下跟踪准确率≥99%。夜间测试结果后续补齐。
最耗时环节为YoloV4对图像进行目标检测的环节,不同显卡性能的耗时不同,详细可查yolov4的各平台测试。跟踪环节仅采用简单的基于检测框的匹配,耗时可以忽略不记。