跟踪自主车辆软件平台
Tracking autonomous vehicle software platforms
全世界——包括影音产业和媒体——都承认,通往4级和5级自动驾驶汽车的道路仍然漫长而曲折。
多家领先的汽车原始设备制造商和技术供应商推迟了自主汽车的上市,这是充分的证据,但如果这些数据点还不够,一个更强烈的信号是,科技公司和汽车原始设备制造商之间已经开始讨论,承认“没有生态系统”支持,完全自主汽车的开发是不可能实现的。
 虽然各家公司的承诺可能各不相同,但汽车制造商和科技公司已开始展开合作,以应对让自动驾驶汽车安全驾驶的挑战。这种务实的做法与五年前令人兴奋的日子形成鲜明对比,当时新兴市场风投资金充裕,充斥着夸夸其谈的视听产品索赔和市场预测。
虽然各家公司的承诺可能各不相同,但汽车制造商和科技公司已开始展开合作,以应对让自动驾驶汽车安全驾驶的挑战。这种务实的做法与五年前令人兴奋的日子形成鲜明对比,当时新兴市场风投资金充裕,充斥着夸夸其谈的视听产品索赔和市场预测。
如今,随着投资界对L4和L5的热情开始减弱,而Covid-19蚕食了整个经济,因此,由炒作和廉价风投资金支撑的AV初创公司将蒸发已成定局。
然而,有一个结论是明确的:那些已经在AV平台开发方面进行了大量投资并取得了一定进展的公司并没有放弃开发自己的完整AV堆栈。他们将其视为有生之年最大的科技挑战,即使不是在不久的将来,也仍然认为这将决定他们的命运。
在过去的五年里,《电子时报》报道了很多追求AV梦想的汽车制造商和技术供应商之间的勾结和交易。
回顾过去,我们会问,现在所有的交易和合作关系都在哪里?到底取得了什么进展?
《经济时报》得到了IHS Markit汽车技术研究总监兼首席分析师Egil
Juliussen的帮助,来回顾不断变化的AV市场。我们的目标是确定幸存者仍在开发他们自己的AV软件堆栈。我们想探索他们的项目是谁,什么,在哪里和什么时候。
第一项任务是解开主要参与者之间“宣布”的合作关系网。关系图——谁和谁在床上——很混乱。为了搞清这一切,朱利森把AV的混乱分为三个独立的箱子:机器人出租车、原始设备制造商和高科技软件平台。
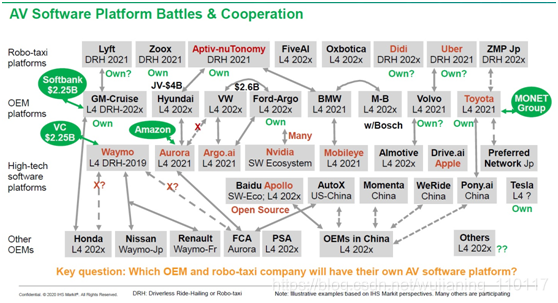
Robo-taxi platforms
在robo taxi bin(见上文)中,Juliussen列出了8家公司,包括Uber、Lyft和Didi等现有的代驾公司,以及Aptiv nuTonomy、FiveAI、Oxbotica和ZMP Jp。
其中,朱利森强调了三个似乎正在取得进展的公司:Aptiv nuTonomy、滴滴和Uber。Zoox和Aptiv nuTonomy被认为拥有自己的AV软件堆栈。
成立于2014年的Zoox一直致力于开发一款全新的自动驾驶汽车,瞄准机器人出租车市场。不过,目前,Zoox已经用它的自动驾驶系统对丰田高原车进行了改装。它正在旧金山的金融区和北海滩地区进行试验。
另一个玩家,Aptiv(原Delphi)三年前收购了NuTonomy,麻省理工学院的一个分支机构,专注于自动驾驶汽车和自主移动机器人的开发软件。
去年9月,Aptiv宣布与现代合资40亿美元。这笔交易于今年3月完成,可以看作是阿普蒂夫·努托诺米的一次政变。
然而,当原始设备制造商开始与机器人出租车平台供应商和高科技软件供应商在AV全套设备上进行多项交易时,关系就会变得混乱。
例如,在完整的AV系统方面,现代的忠诚度仍然不明确。韩国汽车原始设备制造商很可能同时押注两匹马——阿普蒂夫·努托诺米(Aptiv nuTonomy)和奥罗拉(Aurora)。
Aurora是一家于2017年1月成立的初创公司,正在开发一款名为Aurora Driver的完整AV堆栈。现代是极光的早期投资者之一。奥罗拉此前表示,计划扩大与现代汽车的研发计划,开发一款自动驾驶平台。显然是两个恋人之间的矛盾,现代汽车表示,与Aptiv nuTonomy的新合资企业不会影响其与极光的关系。现代汽车不愿意接吻,也不愿意透露自己到底在用极光做什么。
OEM平台
在OEM平台的第二个bin中,Juliussen列出了通用巡航(GM Cruise)、现代(Hyundai)、大众(VW)、福特(Ford Argo)、宝马(BMW)、奔驰(Mercedes-Benz)和博世(Bosch)、沃尔沃(Volvo)和丰田(Toyota)。他们都在测试自己的自动驾驶汽车。
如今,这些汽车制造商的地位各不相同。拥有自己AV软件平台的汽车原始设备制造商包括:通用汽车巡航(建立在克鲁斯的AV软件平台上)、福特Argo(基于阿尔戈艾和丰田自己的。沃尔沃可能有一个,但它之前宣布与总部位于匈牙利布达佩斯的软件平台供应商AImotive(以前是AdasWorks)建立了合作关系。
宝马与Intel/MobileEye的AV软件平台联姻。如前所述,现代与极光和Aptiv nuTonomy的重婚关系仍然岌岌可危。
大众没有自己的AV软件平台,去年夏天抛弃了极光,转而转向福特阿尔戈艾。
高科技软件平台
在第三个包括整个高科技领域的箱子里,朱利森列出了Waymo, Aurora, Argo.ai, AImotive,
Drive.ai在美国和一个覆盖日本首选网络的亚洲团队,百度(Apollo project)、AutoX、Momenta、WeRide和Pony.ai.
领先的AV芯片供应商——Nvidia和MobileEye也在开发自己的软件平台。当然,还有特斯拉,建立自己的完整的AV堆栈。
在这个拥挤箱里的名人是Waymo, Aurora, Argo.ai, Intel/MobileEye,Nvidia和Drive.ai.
去年6月,苹果抢占了驱动.ai-一家总部位于加州山景城的初创公司成立于2015年,致力于开发使用人工智能的自动驾驶系统。
百度的阿波罗(Apollo)是一个开源AV平台,建立在大量生态系统玩家的基础上。
公共数据不足
现在,AV市场上最棘手的问题是:谁有一个可靠、随时可用、比其他公司更好的AV软件平台?
鉴于AV软件平台开发商几乎没有透露任何信息,唯一可能提供对AV前景有深入了解的数据是由加州机动车辆部(California Department of Motor
Vehicles)编制的AV脱离报告。
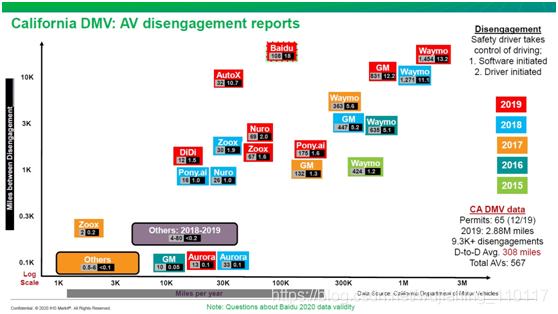
根据法律规定,任何在加州道路上积极测试自动驾驶汽车的人都必须披露驾驶里程和人类驾驶员被迫控制的频率,这一紧急时刻被称为“脱离”
DMV将分离定义为“当检测到自主技术故障时,或当车辆的安全运行要求自动车辆试验驾驶员断开自主模式并立即手动控制车辆时,自动模式停用。”
安全专家认为,这种方法往往会潜移默化地鼓励测试人员尽量减少他们的干预,这可能会导致不安全的测试。其中一位专家,菲尔·库普曼(Phil Koopman)直截了当地说,“脱离接触是安全测试的错误标准。”
不过,Juliussen认为,AV脱离报告有助于汽车业深入了解自动驾驶汽车的就绪程度(如果不是安全性的话)。
截至去年年底,已有65家公司获得加州车管所的试驾车许可。朱利森指出,虽然567辆车“合格”,但只有420辆AV上街。
Juliussen提供的图表提供了一条曲线图,显示了从2015年到2019年,每个AV平台的脱离数量每年的变化。不过,朱利森对百度脱离接触数据的有效性提出质疑。
据报道,百度去年行驶了108300英里,向加州车管所报告说,他们的车辆在两次停驶之间行驶了18英里。包括朱利森在内的许多行业观察家对此持怀疑态度,因为百度似乎在说,它的AV软件突然变得比Waymo(停产间隔13.2英里)和通用汽车(12.2英里)安全得多。
美国的主要AV软件平台
Juliussen汇总了下表,列出了美国五个主要的AV软件平台,提供了每个AV软件平台项目的范围、目标AV用例和测试区域。
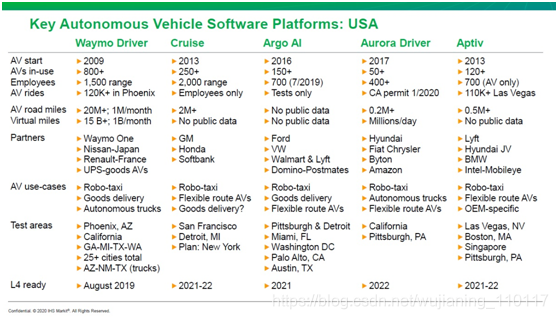
这些公司中的大多数似乎声称他们的AV软件平台将在2021年到2022年之间“准备就绪”。例外的是Waymo,去年秋天宣布在亚利桑那州的某些地区推出“完全无人驾驶的Waymo汽车”。
目前每个AV平台开发者使用的AV数量各不相同。Waymo的数量最多(使用800+),Aptiv为120+,Aurora为50+。
然而,在Covid-19时代,所有在美国真实街道上的试驾都已踩下刹车。
例如,Waymo在其网站上发布消息称,“我们在亚利桑那州的所有Waymo One rider服务暂时暂停,包括我们为训练有素的驾驶员提供的服务以及我们在早期骑手计划中提供的完全无人驾驶服务。”
但Waymo补充道,“虽然我们的服务仍然暂停,阿里佐纳人将开始看到一些韦莫的车辆在5月11日重新上路。这是我们安全恢复运营的分层方法的第一部分,从我们的测试车队开始,负责任地再次为Waymo One车手提供服务。”
这场大流行肯定会以很大程度上未知的方式影响AV软件平台开发的进程。
最近,影音产业开始传播一种对AV的新看法,“这场大流行,如果有的话,已经表明了对自动驾驶汽车的需求可能比预期的更大。”
Juliussen虽然部分同意这样的观点,但他告诉《经济时报》,“我认为现在比以前更需要AV,但许多AV参与者将没有财力继续维持之前的投资水平。主要的高科技公司可以做到这一点——谷歌、英特尔和一些中国公司。大多数汽车原始设备制造商必须做出一些选择,比如投资电池电动汽车或AV,他们可能会在每个细分市场削减一些,直到汽车销售接近正常水平。”
Juliussen补充道:“从战略的角度来看,电池电动汽车可能比AV更重要,除非他们想给特斯拉太多的市场份额。”