分类
分类(Classification)任务就是通过学习获得一个目标函数(Target Function)f, 将每个属性集x映射到一个预先定义好的类标号y。
分类任务的输入数据是记录的集合,每条记录也称为实例或者样例。用元组(X,y)表示,其中,X 是属性集合,y是一个特殊的属性,指出样例的类标号(也称为分类属性或者目标属性)。
解决分类问题的一般方法
分类技术是一种根据输入数据集建立分类模型的系统方法。
分类技术一般是用一种学习算法确定分类模型,该模型可以很好地拟合输入数据中类标号和属性集之间的联系。学习算法得到的模型不仅要很好拟合输入数据,还要能够正确地预测未知样本的类标号。因此,训练算法的主要目标就是要建立具有很好的泛化能力模型,即建立能够准确地预测未知样本类标号的模型。
分类方法的实例包括:决策树分类法、基于规则的分类法、神经网络、支持向量机、朴素贝叶斯分类方法等。
通过以上对分类问题一般方法的描述,可以看出分类问题一般包括两个步骤:
-
模型构建(归纳)
通过对训练集合的归纳,建立分类模型。 -
预测应用(推论)
根据建立的分类模型,对测试集合进行测试。
决策树
决策树是一种典型的分类方法,首先对数据进行处理,利用归纳算法生成可读的规则和决策树,然后使用决策对新数据进行分析。本质上决策树是通过一系列规则对数据进行分类的过程。
决策树的优点
- 推理过程容易理解,决策推理过程可以表示成If Then形式;
- 推理过程完全依赖于属性变量的取值特点;
- 可自动忽略目标变量没有贡献的属性变量,也为判断属性变量的重要性,减少变量的数目提供参考。
决策树算法
与决策树相关的重要算法:CLS, ID3,C4.5,CART
- Hunt,Marin和Stone 于1966年研制的CLS学习系统,用于学习单个概念。
- 1979年, J.R. Quinlan 给出ID3算法,并在1983年和1986年对ID3
进行了总结和简化,使其成为决策树学习算法的典型。 - Schlimmer和Fisher于1986年对ID3进行改造,在每个可能的决策树节点创建缓冲区,使决策树可以递增式生成,得到ID4算法。
- 1988年,Utgoff 在ID4基础上提出了ID5学习算法,进一步提高了效率。 1993年,Quinlan
进一步发展了ID3算法,改进成C4.5算法。 - 另一类决策树算法为CART,与C4.5不同的是,CART的决策树由二元逻辑问题生成,每个树节点只有两个分枝,分别包括学习实例的正例与反例。
决策树的表示
决策树的基本组成部分:决策结点、分支和叶子。
决策树中最上面的结点称为根结点,是整个决策树的开始。每个分支是一个新的决策结点,或者是树的叶子。每个决策结点代表一个问题或者决策.通常对应待分类对象的属性。每个叶结点代表一种可能的分类结果。
在沿着决策树从上到下的遍历过程中,在每个结点都有一个测试。对每个结点上问题的不同测试输出导致不同的分枝,最后会达到一个叶子结点。这一过程就是利用决策树进行分类的过程,利用若干个变量来判断属性的类别。
ID3
ID3算法主要针对属性选择问题。是决策树学习方法中最具影响和最为典型的算法。
该方法使用信息增益度选择测试属性。
- 信息量大小的度量
Shannon1948年提出的信息论理论。事件ai的信息量I(ai )可如下度量:
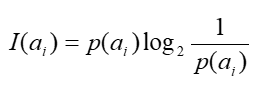
其中p(ai)表示事件ai发生的概率。
假设有n个互不相容的事件a1,a2,a3,….,an,它们中有且仅有一个发生,则其平均的信息量可如下度量:

由上式,对数底数可以为任何数,不同的取值对应了熵的不同单位。
通常取2,并规定当p(ai)=0时:
- 熵
用熵度量样例的均一性
熵刻画了任意样例集合 S 的纯度
给定包含关于某个目标概念的正反样例的样例集S,那么 S 相对这个布尔型分类(函数)的熵为:

信息论中对熵的一种解释:熵确定了要编码集合S中任意成员的分类所需要的最少二进制位数;熵值越大,需要的位数越多。
更一般地,如果目标属性具有c个不同的值,那么 S 相对于c个状态的分类的熵定义为:

例如:求集合R = {a,a,a,b,b,b,b,b}的信息熵

理解信息熵:
- 信息熵是用来衡量一个随机变量出现的期望值,一个变量的信息熵越大,那么它出现的各种情况也就越多,也就是包含的内容多,我们要描述它就需要付出更多的表达才可以,也就是需要更多的信息才能确定这个变量。
- 信息熵是随机变量的期望。度量信息的不确定程度。信息的熵越大,信息就越不容易搞清楚(杂乱)。
- 一个系统越是有序,信息熵就越低;反之,一个系统越是混乱,信息熵就越高。信息熵也可以说是系统有序化程度的一个度量。
- 信息熵用以表示一个事物的非确定性,如果该事物的非确定性越高,你的好奇心越重,该事物的信息熵就越高。
- 熵是整个系统的平均消息量。 信息熵是信息论中用于度量信息量的一个概念。一个系统越是有序,信息熵就越低;反之,一个系统越是混乱,信息熵就越高。
- 处理信息就是为了把信息搞清楚,实质上就是要想办法让信息熵变小。
- 信息增益
用来衡量给定的属性区分训练样例的能力
ID3算法在生成 树的每一步使用信息增益从候选属性中选择属性
用信息增益度量熵的降低程度
属性A 的信息增益,使用属性A分割样例集合S 而导致的熵的降低程度

Gain (S, A)是在知道属性A的值后可以节省的二进制位数
信息增益代表了在一个条件下,信息复杂度(不确定性)减少的程度。
理解信息增益:
熵:表示随机变量的不确定性。
条件熵:在一个条件下,随机变量的不确定性。
信息增益:熵 - 条件熵。表示在一个条件下,信息不确定性减少的程度。
例如:
假设X(明天下雨)的信息熵为2(不确定明天是否下雨),Y(如果是阴天则下雨)的条件熵为0.01(因为如果是阴天就下雨的概率很大,信息就少了) 信息增益=2-0.01=1.99。信息增益很大。说明在获得阴天这个信息后,明天是否下雨的信息不确定性减少了1.99,所以信息增益大。也就是说阴天这个信息对下雨来说是很重要的。
ID3 决策树建立算法
- 决定分类属性
- 对目前的数据表,建立一个节点N
- 如果数据库中的数据都属于同一个类,N就是树叶,在树叶上标出所属的类
- 如果数据表中没有其他属性可以考虑,则N也是树叶,按照少数服从多数的原则在树叶上标出所属类别
- 否则,根据平均信息期望值E或GAIN值选出一个最佳属性作为节点N的测试属性
- 节点属性选定后,对于该属性中的每个值:
从N生成一个分支,并将数据表中与该分支有关的数据收集形成分支节点的数据表,在表中删除节点属性那一栏如果分支数据表非空,则运用以上算法从该节点建立子树。
小结
ID3算法是一种经典的决策树学习算法,由Quinlan于1979年提出。ID3算法的基本思想是,以信息熵为度量,用于决策树节点的属性选择,每次优先选取信息量最多的属性,亦即能使熵值变为最小的属性,以构造一颗熵值下降最快的决策树,到叶子节点处的熵值为0。此时,每个叶子节点对应的实例集中的实例属于同一类。
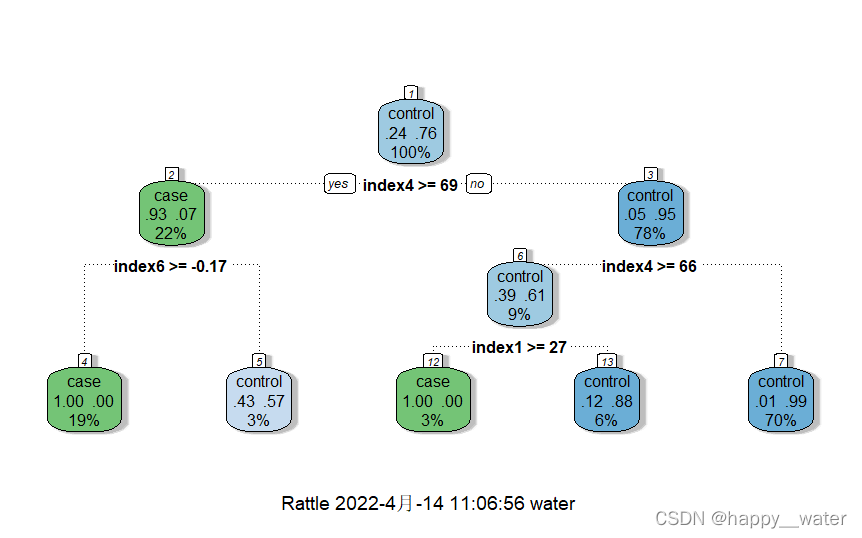
R语言中的决策树实现
- 安装数据包
安装rpart、rpart.plot、rattle三个数据包
rpart:用于分类与回归分析
rpart.plot:用于绘制数据模型
rattle:提供R语言数据挖掘图形界面
安装语句:
rpart:install.packages("rpart")
rpart:install.packages("rpart.plot")
install.packages("rattle")
- 步骤1:生成训练集和测试集
以iris数据集为例:
训练集:
iris.train=iris[2*(1:75)-1,]
返回原数据集1、3、5、7、8、......、149奇数行行所有列的数据
测试集:
iris.test= iris[2*(1:75),]
返回原数据集2、4、6、8、10、......、150偶数行所有列的数据
- 步骤2:生成决策树模型
加载rpart包:
> library("rpart")
> model <- rpart(Species ~ Sepal.Length + Sepal.Width + Petal.Length + Petal.Width, data = iris.train, method="class")
rpart参数解释:
rpart(formula, data, method, parms, ...)
- formula是回归方程的形式,y~x1+x2+…,
iris一共有5个变量,因变量是Species,自变量是其余四个变量,所以formula可以省略为Species~. - data是所要学习的数据集
- method根据因变量的数据类型有如下几种选择:anova(连续型),poisson(计数型),class(离散型),exp(生存型),因为我们的因变量是花的种类,属于离散型,所以method选择class
- parms可以设置纯度的度量方法,有gini(默认)和information(信息增益)两种。
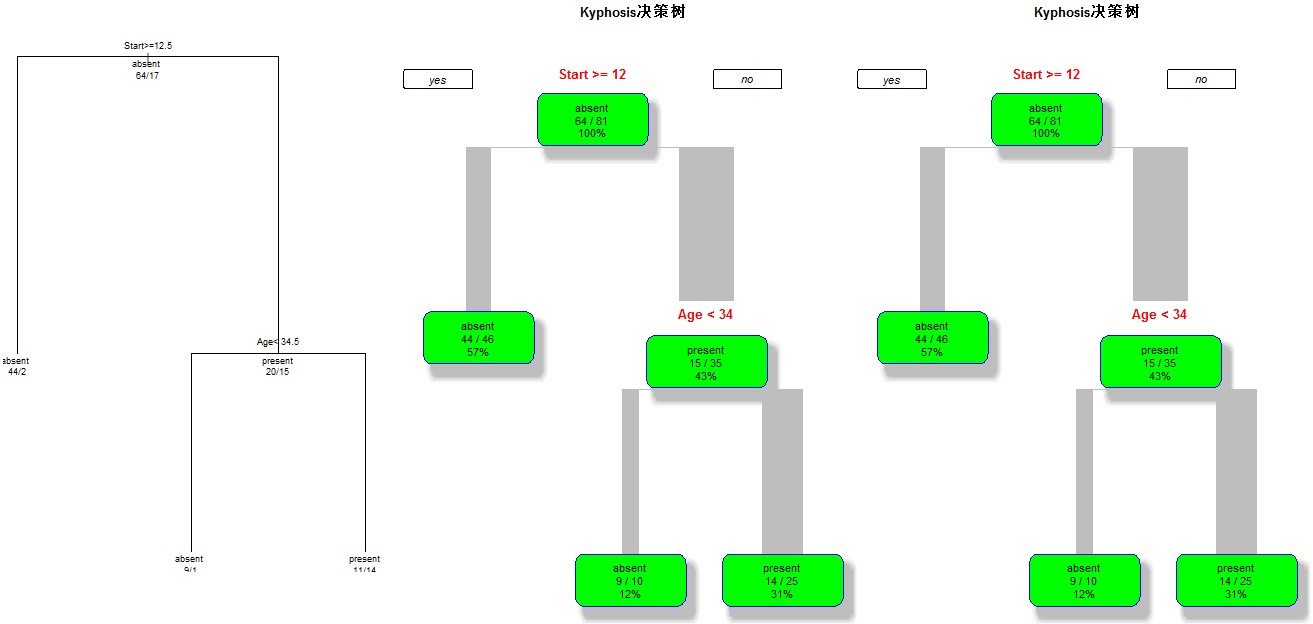
- 步骤3:绘制决策树
rpart.plot(model)
或
fancyRpartPlot(model)
- 步骤4:对测试集进行预测
iris.rp3=predict(model, iris.test[,-5], type="class")
iris.test[,-5]的意思是去掉原测试集第5列后的数据
- 步骤5:查看预测结果并对结果进行分析,计算出该决策树的accuracy(分类正确的样本数除以总样本数)
table(iris.test[,5],iris.rp3)
可得accuracy=(25+24+22)/75=94.67%
- 步骤6:生成规则
asRules(model)