基于对数障碍函数法的内点法
- 牛顿法(Newton Method)
- 对数障碍函数方法
- 一个简单的例子
- python代码
牛顿法(Newton Method)
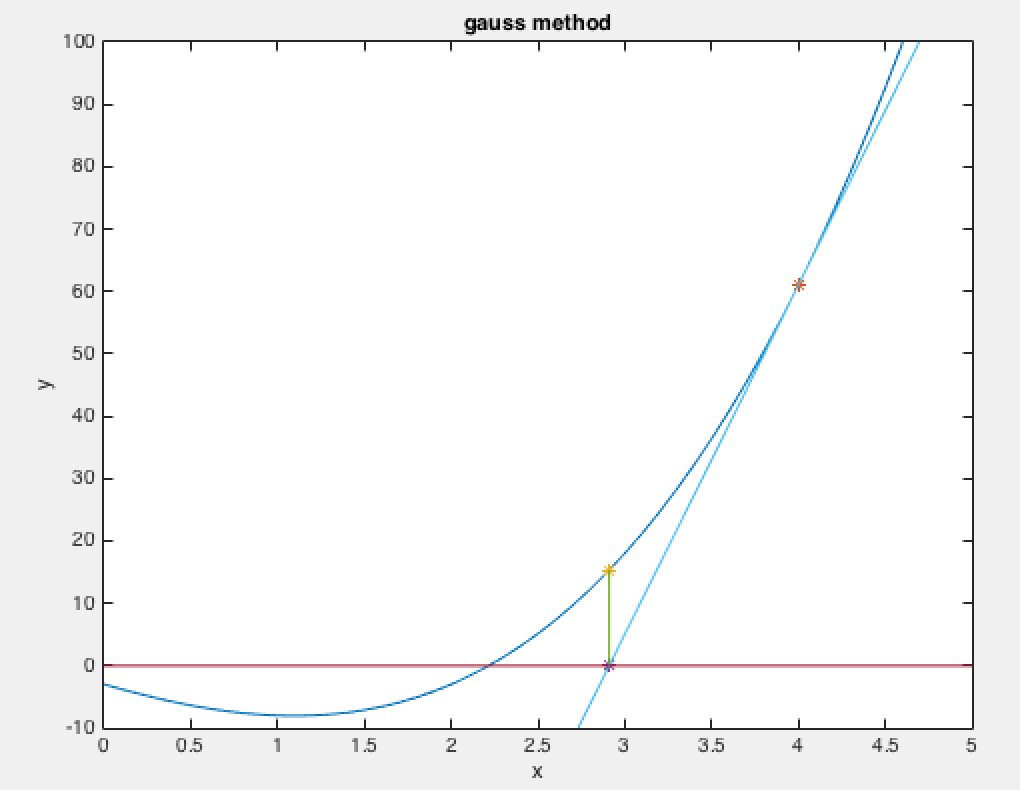
牛顿法与梯度下降法,最速下降法等优化算法类似,是基于梯度的方法。给定一个二次可微的凸目标函数 f ( x ) f(x) f(x),将其在点 x k x_k xk处泰勒展开到二阶:
f ( x ) = f ( x k ) + ▽ f ( x k ) ( x − x k ) + 1 2 ▽ 2 f ( x k ) ( x − x k ) 2 , (1) f(x) = f(x_k) + \triangledown f(x_k)(x - x_k) + \frac{1}{2} \triangledown^2 f(x_k)(x - x_k)^2, \tag{1} f(x)=f(xk)+▽f(xk)(x−xk)+21▽2f(xk)(x−xk)2,(1)
两边同时对 x x x进行求导得到 ▽ f ( x ) = ▽ f ( x k ) + ▽ 2 f ( x k ) ( x − x k ) \triangledown f(x) = \triangledown f(x_k) + \triangledown^2 f(x_k )(x - x_k) ▽f(x)=▽f(xk)+▽2f(xk)(x−xk)。实际上求 f ( x ) f(x) f(x)的最小值的过程,可以转化成求 △ f ( x ) = 0 \triangle f(x) = 0 △f(x)=0的过程。因此令 ▽ f ( x ) = 0 \triangledown f(x) = 0 ▽f(x)=0,我们就得到了基本牛顿法的更新规则:
x = x k − ▽ 2 f ( x k ) − 1 ▽ f ( x k ) . (2) x = x_k - \triangledown^2 f(x_k)^{-1} \triangledown f(x_k). \tag{2} x=xk−▽2f(xk)−1▽f(xk).(2)
其中, ▽ x k = − ▽ 2 f ( x k ) − 1 ▽ f ( x k ) \triangledown x_k = - \triangledown^2 f(x_k)^{-1} \triangledown f(x_k) ▽xk=−▽2f(xk)−1▽f(xk)称为牛顿步。由于 ▽ 2 f ( x k ) \triangledown^2 f(x_k) ▽2f(xk)的正定性,我们可以得到:
▽ f ( x k ) ▽ x k = − ▽ f ( x k ) ▽ 2 f ( x k ) − 1 ▽ f ( x k ) < 0 (3) \triangledown f(x_k) \triangledown x_k = -\triangledown f(x_k) \triangledown^2 f(x_k)^{-1} \triangledown f(x_k) < 0 \tag{3} ▽f(xk)▽xk=−▽f(xk)▽2f(xk)−1▽f(xk)<0(3)
因此, ▽ x k \triangledown x_k ▽xk牛顿步是函数值下降的方向。但是经过实践发现,基本牛顿法的步长有时候可能会过大,它的初始点需要足够的“靠近“极小值点,否则可能会导致算法不收敛(我就遇到这种情况)。所以有人提出了全局牛顿法,基于Armijio搜索寻找一个合适的步长。全局牛顿法的算法如下(参考Stephen Boyd的convex optimzation一书):


对数障碍函数方法
我们考虑一个一般形式的优化问题:
minimize f 0 ( x ) s . t . f i ( x ) ≤ 0 , i = 1 , 2 , . . . , m A x = b (4) \text{minimize} \quad f_0(x) \\ s.t. \quad f_i(x) \leq 0, i = 1, 2, ..., m\\ Ax = b \tag{4} minimizef0(x)s.t.fi(x)≤0,i=1,2,...,mAx=b(4)
障碍法的思想是通过向目标函数中添加一个障碍函数(或者惩罚函数)来去掉优化问题中的不等式约束。把原优化问题的形式转化成如下的形式:
minimize f 0 ( x ) + ∑ i = 1 m I _ ( f i ( x ) ) s . t . A x = b (5) \text{minimize} \quad f_0(x) + \sum_{i = 1}^{m}I_{\_}(f_i(x)) \\ s.t. \quad Ax = b \tag{5} minimizef0(x)+i=1∑mI_(fi(x))s.t.Ax=b(5)
其中 I _ ( u ) I_{\_}(u) I_(u)是这样一个函数:
I _ ( u ) { 0 u ≤ 0 , ∞ u > 0. (6) I_{\_}(u)\begin{cases} 0 & u \leq 0, \\ \infty & u > 0. \end{cases} \tag{6} I_(u){0∞u≤0,u>0.(6)
其实就是在不等式约束的边界竖起一堵”墙“。当满足约束时, I _ ( u ) I_{\_}(u) I_(u)值为0;当破坏约束时, I _ ( u ) I_{\_}(u) I_(u)值为无穷,对函数值进行惩罚。对数障碍方法利用如下的障碍函数:
I _ ( u ) = − 1 t l o g ( − u ) , u < 0 (7) I_{\_}(u) = - \frac{1}{t} log(-u), u < 0 \tag{7} I_(u)=−t1log(−u),u<0(7)
将其带入到上面的优化问题(5)可得到如下的优化问题:
minimize t f 0 ( x ) + ∑ i = 1 m − l o g ( − f i ( x ) ) s . t . A x = b (8) \text{minimize} \quad t f_0(x) + \sum_{i = 1}^{m} - log (- f_i(x))\\ s.t. \quad Ax = b \tag{8} minimizetf0(x)+i=1∑m−log(−fi(x))s.t.Ax=b(8)
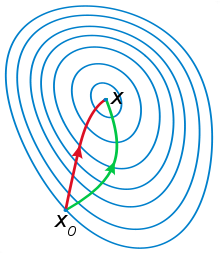
其中,目标函数函数是凸的,因为 − 1 t l o g ( − u ) - \frac{1}{t} log(-u) −t1log(−u)关于 u u u是凸的,两个凸函数相加仍然是凸的。因此,我们可以用牛顿法进行求解。我们定义 x ∗ ( t ) x^*(t) x∗(t)为问题(8)最优解, p ∗ p^* p∗为原问题(4)的最小值,通过central path(具体可看convex optimization 第11章)的分析,可以得到:
f ( x ∗ ( t ) ) − p ∗ ≤ m t , (9) f(x^*(t)) - p^* \leq \frac{m}{t}, \tag{9} f(x∗(t))−p∗≤tm,(9)
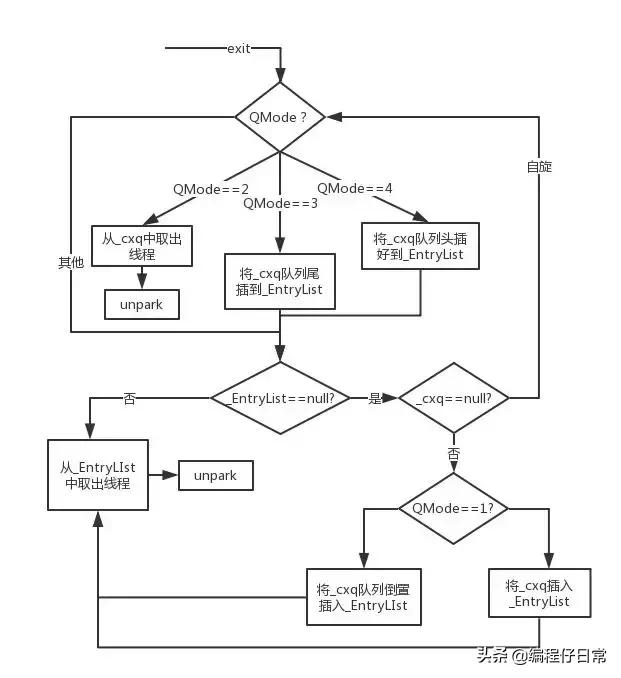
从(9)中可看出当 t t t逐渐增大, x ∗ ( t ) x^*(t) x∗(t)最终可以收敛到最小值值点。 f ( x ∗ ( t ) ) − p ∗ f(x^*(t)) - p^* f(x∗(t))−p∗称为对偶gap。对数障碍法的算法如下:
实际上,障碍法的外层是对参数 t t t的更新,内层利用牛顿迭代法求解最优值。当 u u u设置的比较大的时候,外层更新的次数比较少,但是内层牛顿法迭代的次数增加。反之则相反,因此需要寻找合适的 u u u,通常设置 u ∈ { 10 , 20 } u \in \{10, 20\} u∈{10,20}.

一个简单的例子
考虑一个简单的优化问题:n
minimize c T x s . t . x ⪰ 0. (10) \text{minimize} \quad c^Tx \\ s.t. \quad x \succeq 0. \tag{10} minimizecTxs.t.x⪰0.(10)
python代码
from matplotlib import pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
import numpy as np
import math as math# 目标函数
def fun(x, t):result = 0for i in range(x.size):if (x[i] <= 0):return float("inf")result += t * x[i] - np.log2(x[i])return result# 基于对数障碍法的内点法
def logBarriar():# 初始值m = 2t = 4x = np.array([1.3, 1]) # 初始点epsilon = 0.001 # 障碍函数法阈值mu = 10x = newtonMethod(x, t)while m / t > epsilon:# 更新tt = mu * t# 全局牛顿迭代求解t*f(x)+Φ*(x)的最值x = newtonMethod(x, t)# 全局牛顿迭代法
def newtonMethod(x_0, t):x = x_0epsilon = 0.00001 # 牛顿法阈值g = np.array(np.array([t, t]) - 1 / (x * np.log(2)))H = np.array([[1 / (math.pow(x[0], 2) * np.log(2)), 0], [0, 1 / (math.pow(x[1], 2) * np.log(2))]])delta_x = - np.matmul(g, np.linalg.inv(H.T))lambda_2 = np.matmul(np.matmul(g, np.linalg.inv(H.T)), g.T)trace = [[], []] # 迭代轨迹while lambda_2 / 2 > epsilon:# 添加到迭代轨迹trace[0].append(x[0])trace[1].append(x[1])# 回溯线性搜索确定步长alpha = 0.1beta = 0.5k = 1 # 步长while fun(x + k * delta_x, t) > fun(x, t) + alpha * k * lambda_2:k = beta * k# 更新xx = x + k * delta_x# 目标函数的一阶导g = np.array(np.array([t, t]) - 1 / (x * np.log(2)))# 目标函数的Hessian矩阵H = np.array([[1 / (math.pow(x[0], 2) * np.log(2)), 0], [0, 1 / (math.pow(x[0], 2) * np.log(2))]])# 下降方向delta_x = - np.matmul(g, np.linalg.inv(H.T))# 牛顿增量lambda_2 = np.matmul(np.matmul(g, np.linalg.inv(H.T)), g.T)# 定义坐标轴ax1 = plt.axes(projection='3d')# 绘制三维函数图像x_1 = np.arange(0.1, 1.5, 0.1)x_2 = np.arange(0.1, 1.5, 0.1)xx_1, xx_2 = np.meshgrid(x_1, x_2)z = t * (xx_1 + xx_2) - (np.log2(xx_1) + np.log2(xx_2))ax1.plot_surface(xx_1, xx_2, z, cmap='rainbow')plt.show()# 绘制等高线plt.contour(xx_1, xx_2, z, 5, color='black')plt.plot(trace[0], trace[1], marker='X', color='b')plt.show()return xif __name__ == '__main__':logBarriar()初始值为 c = ( 1 1 ) c = \begin{pmatrix}1\\1\end{pmatrix} c=(11), t = 4 t = 4 t=4, x = ( 1.3 , 1 ) x = (1.3, 1) x=(1.3,1)。下图是第一次迭代时,(8)的目标函数的图像和等高线以及迭代路径: