一、引言
对于一些较复杂的函数,为了便于研究,往往希望用一些简单的函数来近似表达,例如:
当x->0时,sinx≈arcsinx≈tanx≈arctanx≈ln(1+x)≈ex-1≈x
由于用多项式表示的函数,只要对自变量进行有限次加、减、乘三种算术运算,便能求出它的函数值来,因此我们经常用多项式来近似表达函数。
泰勒公式就是将函数用多项式表达的一种通用方法,又称为泰勒展开、泰勒级数,是将一个在x=x0处具有n阶导数的函数f(x)利用关于(x-x0)的n次多项式来逼近函数的方法。
二、泰勒中值定理1
定理: 如果函数(x)在x0处具有n阶导数,那么存在x0的一个邻域,于该邻域内的任一x,有:

其中:Rn(x) = o((x-x0)n) (3-4)
具体证明的介绍请参考《理解泰勒中值定理1的证明过程的两个影响理解的简单隐含推导》的介绍。
说明:
多项式(3-3)公式右边去除“+Rn(x)”部分用pn(x)来表示:

称pn(x)为函数f(x)在x0处(或按(x-x0)的幂展开)的n 次泰勒多项式。
公式(3-3)本身称为f(x)在x0处(或按(x-x0)的幂展开)的带有佩亚诺(Peano)余项的n 阶泰勒公式,而Rn(x)的表达式(3-4)称为佩亚诺余项,它就是用 n 次泰勒多项式来近似表达f(x)所产生的误差,这一误差是当x一>x0时(x-x0)n的高阶无穷小,但不能由它具体估算出误差的大小。
二、泰勒中值定理2
定理:如果函数f(x)在x0的某邻域U(x0)内具有n+1阶导数,那么对于任意x∈U(x0),有:

其中:

这里ε是x0与x之间的某个值。
证明思路:
- Rn(x)具有n+1阶导数;
- Rn(x0)和Rn(x)在x0位置的n阶导数值都为0;
- Rn(x)和(x-x0)n+1在区间[x0,x]上满足柯西中值定理的要求,则

-
再对Rn’(x)与(n+1)(x-x0)n应用柯西中值定理,得:
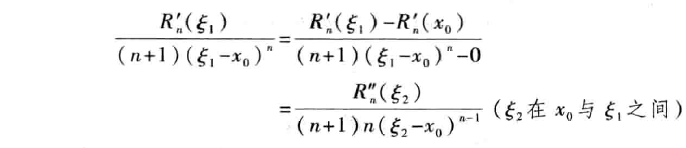
-
照此方法继续下去,经过(n+1)次后,得:

-
同时显然 Rn(n+1)(x) = f(n+1)(x),从而可以证明定理成立。
说明:
公式(3-5)称为f(x)在x0处(或按(x-x0)的幂展开)的带有拉格朗日余项的n阶泰勒公式,而Rn(x)的表达式(3-6)称为拉格朗日余项。当n=0时,泰勒公式(3-5)变成拉格朗日中值公式:
f(x) = f(x0)+f’(ε)(x-x0) ,其中 ε∈(x0,x)
因此,泰勒中值定理2是拉格朗日中值定理的推广。
由泰勒中值定理2可知,以多项式pn(x)近似表达函数f(x)时,其误差为|Rn(x)|。如果对于某个固定的n,当x∈U(x0)时,|f(n+1)(x)|≤M,那么有估计式:

在泰勒公式(3-3)中,如果取x0=0,那么有带有佩亚诺余项的麦克劳林(Maclaurin)公式:

在泰勒公式(3-5)中,如果取x0=0,那么ε在0与x之间。因此可以令ε=θx(0<θ<1),从而泰勒公式(3-5)变成较简单的形式,即所谓带有拉格朗日余项的麦克劳林公式:

由(3-8)或(3-9)可得近似公式:

误差估计式(3-7)相应地变成:

三、部分函数的泰勒公式表示
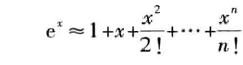
1、ex的泰勒公式
带拉格朗日余项的麦克劳林公式:

n次泰勒多项式为:
2、sinx的泰勒公式
带拉格朗日余项的麦克劳林公式:


3、cosx的泰勒公式
带拉格朗日余项的麦克劳林公式:


4、ln(1+x)的泰勒公式
带拉格朗日余项的麦克劳林公式:


4、(1+x)α的泰勒公式
带拉格朗日余项的麦克劳林公式:


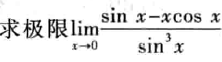
四、应用

五、小结
本文介绍了2个泰勒中值定理,泰勒中值定理1是将在某点具有n+1阶导数的函数表示为一个多项式加个余量的形式,泰勒中值定理2则将泰勒中值定理1的余量进行了细化。通过拉格朗日余项的n阶泰勒公式和带有拉格朗日余项的麦克劳林公式,可以将一个函数表示成n项的n阶多项式,从而为函数后续的运算提供便利。
说明:
本文内容是老猿学习同济版高数的总结,有需要原教材电子版以及OpenCV、Python基础知识、、图像处理原理介绍相关电子资料,或对文章内有有疑问咨询的,请扫博客首页左边二维码加微信公号,根据加微信公号后的自动回复操作。
更多人工智能数学基础请参考专栏《人工智能数学基础》。
写博不易,敬请支持:
如果阅读本文于您有所获,敬请点赞、评论、收藏,谢谢大家的支持!
关于老猿的付费专栏
- 付费专栏《https://blog.csdn.net/laoyuanpython/category_9607725.html 使用PyQt开发图形界面Python应用》专门介绍基于Python的PyQt图形界面开发基础教程,对应文章目录为《 https://blog.csdn.net/LaoYuanPython/article/details/107580932 使用PyQt开发图形界面Python应用专栏目录》;
- 付费专栏《https://blog.csdn.net/laoyuanpython/category_10232926.html moviepy音视频开发专栏 )详细介绍moviepy音视频剪辑合成处理的类相关方法及使用相关方法进行相关剪辑合成场景的处理,对应文章目录为《https://blog.csdn.net/LaoYuanPython/article/details/107574583 moviepy音视频开发专栏文章目录》;
- 付费专栏《https://blog.csdn.net/laoyuanpython/category_10581071.html OpenCV-Python初学者疑难问题集》为《https://blog.csdn.net/laoyuanpython/category_9979286.html OpenCV-Python图形图像处理 》的伴生专栏,是笔者对OpenCV-Python图形图像处理学习中遇到的一些问题个人感悟的整合,相关资料基本上都是老猿反复研究的成果,有助于OpenCV-Python初学者比较深入地理解OpenCV,对应文章目录为《https://blog.csdn.net/LaoYuanPython/article/details/109713407 OpenCV-Python初学者疑难问题集专栏目录 》
- 付费专栏《https://blog.csdn.net/laoyuanpython/category_10762553.html Python爬虫入门 》站在一个互联网前端开发小白的角度介绍爬虫开发应知应会内容,包括爬虫入门的基础知识,以及爬取CSDN文章信息、博主信息、给文章点赞、评论等实战内容。
前两个专栏都适合有一定Python基础但无相关知识的小白读者学习,第三个专栏请大家结合《https://blog.csdn.net/laoyuanpython/category_9979286.html OpenCV-Python图形图像处理 》的学习使用。
对于缺乏Python基础的同仁,可以通过老猿的免费专栏《https://blog.csdn.net/laoyuanpython/category_9831699.html 专栏:Python基础教程目录)从零开始学习Python。
如果有兴趣也愿意支持老猿的读者,欢迎购买付费专栏。