目录
一 透视变换
二 实践
(1)代码
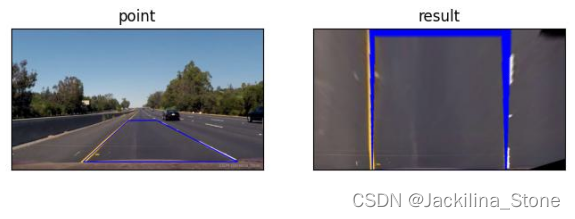
(2)结果图
一 透视变换
现实生活中的空间是三维的,图像中的物体存在近大远小的特征,这种畸变仿射变换不能矫正。因此,我们需要使用到三维空间的变化,就是透视变换。透视变换(Perspective Transformation)的本质是将图像投影到一个新的视平面。
透视变换是非线性变换。透视变换公式如下:
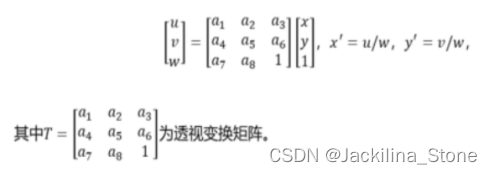
从上述公式可知,变换矩阵有8个参数,因此要确定4个像素点变换前后的对应坐标才能够求出透视变换矩阵。
二 实践
(1)代码
import cv2
import matplotlib.pyplot as plt
import numpy as np
# 获取透视变换的参数矩阵
def cal_perspective_params(img, points):offset_x = 300offset_y = 0img_size = (img.shape[1], img.shape[0])src = np.float32(points)# 设置俯视图中的对应的四个点dst = np.float32([[offset_x, offset_y], [img_size[0] - offset_x, offset_y],[offset_x, img_size[1] - offset_y], [img_size[0] - offset_x, img_size[1] - offset_y]])# 原图像转换到俯视图M = cv2.getPerspectiveTransform(src, dst)# 俯视图到原图像M_inverse = cv2.getPerspectiveTransform(dst, src)return M, M_inversedef img_perspect_transform(img, M):# 根据参数矩阵完成透视变换img_size = (img.shape[1], img.shape[0])return cv2.warpPerspective(img, M, img_size)def dealImageResult(img_path):img = cv2.imread(img_path)img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)# 几个点是人工选择的,根据情况自己调整left_up = [595, 470]right_up = [740, 470]left_down = [365, 680]right_down = [1150, 680]points = [left_up, right_up, left_down, right_down]img = cv2.line(img, left_up, right_up, (0, 0, 255), 3)img = cv2.line(img, right_up, right_down, (0, 0, 255), 3)img = cv2.line(img, left_up, left_down, (0, 0, 255), 3)img = cv2.line(img, left_down, right_down, (0, 0, 255), 3)M, M_inverse = cal_perspective_params(img, points)# 这里只针对透视变化功能,相机去畸变的功能跳过trasform_img = img_perspect_transform(img, M)fig = plt.figure(figsize=(8, 8))titles = ["point", "result"]images = [img, trasform_img]for i in range(2):plt.subplot(1, 2, i + 1), plt.imshow(images[i], 'gray')plt.title(titles[i])plt.xticks([]), plt.yticks([])plt.show()fig.savefig('test_results.jpg', bbox_inches='tight')
if __name__ == '__main__':dealImageResult("test.png")pass(2)结果图