最近在学习廖老师的pytorch教程,学到Resnet 这部分着实的烧脑,这个模型都捣鼓了好长时间才弄懂,附上我学习过程中最为不解的网络的具体结构连接(网上一直没有找到对应网络结构,对与一个自学的学渣般的我,很是无奈,所以搞懂后我就...分享给有需要的的你了)
我们先大致了解一下残差模型
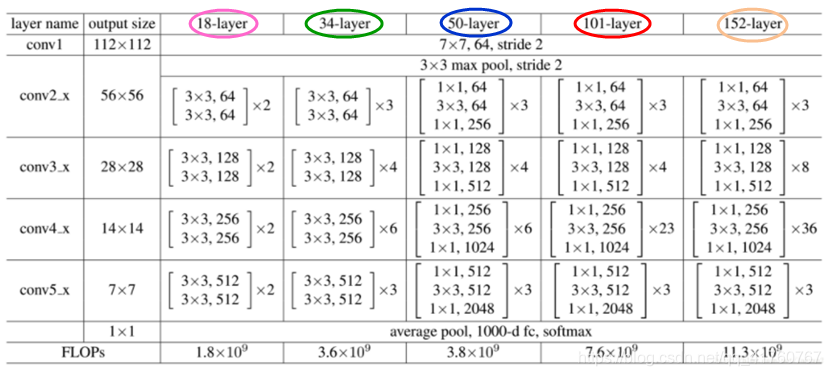
ResNet在2015年被提出,在ImageNet比赛classification任务上获得第一名,因为它“简单与实用”并存,之后很多方法都建立在ResNet50或者ResNet101的基础上完成的,检测,分割,识别等领域都纷纷使用ResNet,Alpha zero也使用了ResNet,所以可见ResNet确实很好用。
下面我们从实用的角度去看看ResNet。
1.ResNet意义
随着网络的加深,出现了训练集准确率下降的现象,我们可以确定这不是由于Overfit过拟合造成的(过拟合的情况训练集应该准确率很高);所以作者针对这个问题提出了一种全新的网络,叫深度残差网络,它允许网络尽可能的加深,其中引入了全新的结构如图1;
这里问大家一个问题
残差指的是什么?
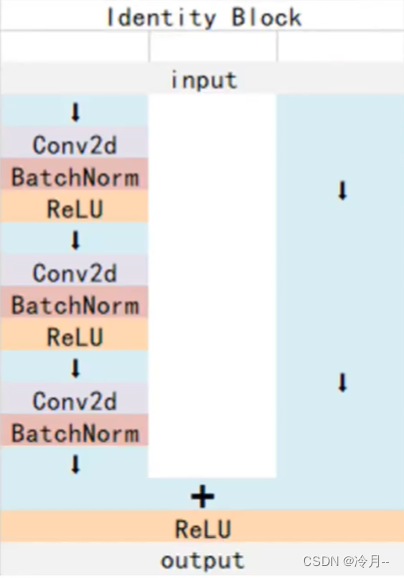
其中ResNet提出了两种mapping:一种是identity mapping,指的就是图1中”弯弯的曲线”,另一种residual mapping,指的就是除了”弯弯的曲线“那部分,所以最后的输出是 y=F(x)+x
identity mapping顾名思义,就是指本身,也就是公式中的x,而residual mapping指的是“差”,也就是y−x,所以残差指的就是F(x)部分。

我们可以看到一个“弯弯的弧线“这个就是所谓的”shortcut connection“,也是文中提到identity mapping,这张图也诠释了ResNet的真谛,当然残差的结构可不会像图中这样单一,
下面是对通过Resnet 对cafir10数据的训练代码 以及网络结构图
import torch
import torch.nn as nn
import torchvision.datasets as normal_datasets
import torchvision.transforms as transforms
from torch.autograd import Variablenum_epochs = 2
lr = 0.001def get_variable(x):x = Variable(x)return x.cuda() if torch.cuda.is_available() else x# 图像预处理
transform = transforms.Compose([transforms.Scale(40),transforms.RandomHorizontalFlip(),transforms.RandomCrop(32),transforms.ToTensor()])# 加载CIFAR-10
train_dataset = normal_datasets.CIFAR10(root='./data/',train=True,transform=transform,download=False)test_dataset = normal_datasets.CIFAR10(root='./data/',train=False,transform=transforms.ToTensor())train_loader = torch.utils.data.DataLoader(dataset=train_dataset,batch_size=100,shuffle=True)test_loader = torch.utils.data.DataLoader(dataset=test_dataset,batch_size=100,shuffle=False)# 3x3 卷积
def conv3x3(in_channels, out_channels, stride=1):return nn.Conv2d(in_channels, out_channels, kernel_size=3,stride=stride, padding=1, bias=False)# Residual Block
class ResidualBlock(nn.Module):def __init__(self, in_channels, out_channels, stride=1, downsample=None):super(ResidualBlock, self).__init__()self.conv1 = conv3x3(in_channels, out_channels, stride)self.bn1 = nn.BatchNorm2d(out_channels)self.relu = nn.ReLU(inplace=True)self.conv2 = conv3x3(out_channels, out_channels)self.bn2 = nn.BatchNorm2d(out_channels)self.downsample = downsampledef forward(self, x):residual = xout = self.conv1(x)out = self.bn1(out)out = self.relu(out)out = self.conv2(out)out = self.bn2(out)if self.downsample:residual = self.downsample(x)out += residualout = self.relu(out)return outclass ResNet(nn.Module):def __init__(self, block, layers, num_classes=10):super(ResNet, self).__init__()self.in_channels = 16self.conv = conv3x3(3, 16)self.bn = nn.BatchNorm2d(16)self.relu = nn.ReLU(inplace=True)self.layer1 = self.make_layer(block, 16, layers[0])self.layer2 = self.make_layer(block, 32, layers[0], 2)self.layer3 = self.make_layer(block, 64, layers[1], 2)self.avg_pool = nn.AvgPool2d(8)self.fc = nn.Linear(64, num_classes)def make_layer(self, block, out_channels, blocks, stride=1,mm=0):#print(out_channels,blocks,'****')downsample = Noneif (stride != 1) or (self.in_channels != out_channels):downsample = nn.Sequential(conv3x3(self.in_channels, out_channels, stride=stride),nn.BatchNorm2d(out_channels))layers = []layers.append(block(self.in_channels, out_channels, stride, downsample))mm+=1self.in_channels = out_channelsfor i in range(1, blocks):layers.append(block(out_channels, out_channels))return nn.Sequential(*layers)def forward(self, x):out = self.conv(x)out = self.bn(out)out = self.relu(out)out = self.layer1(out)out = self.layer2(out)out = self.layer3(out)out = self.avg_pool(out)out = out.view(out.size(0), -1)out = self.fc(out)return outresnet = ResNet(ResidualBlock, [2,2 ,2,2]) #blocks
print(resnet)
if torch.cuda.is_available():resnet = resnet.cuda()loss_func = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(resnet.parameters(), lr=lr)# 训练
for epoch in range(num_epochs):for i, (images, labels) in enumerate(train_loader):images = get_variable(images)labels = get_variable(labels)outputs = resnet(images)loss = loss_func(outputs, labels)optimizer.zero_grad()loss.backward()optimizer.step()if (i + 1) % 100 == 0:print("Epoch [%d/%d], Iter [%d/%d] Loss: %.4f" % (epoch + 1, num_epochs, i + 1, 500, loss.data[0]))# 衰减学习率if (epoch + 1) % 20 == 0:lr /= 3optimizer = torch.optim.Adam(resnet.parameters(), lr=lr)# 测试
correct = 0
total = 0
for images, labels in test_loader:images = get_variable(images)labels = get_variable(labels)outputs = resnet(images)_, predicted = torch.max(outputs.data, 1)total += labels.size(0)correct += (predicted == labels.data).sum()print(' 测试 准确率: %d %%' % (100 * correct / total))# 保存模型参数
torch.save(resnet.state_dict(), 'resnet.pkl')网络结构
ResNet((conv): Conv2d(3, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace)(layer1): Sequential((0): ResidualBlock((conv1): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace)(conv2): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True))(1): ResidualBlock((conv1): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace)(conv2): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(layer2): Sequential((0): ResidualBlock((conv1): Conv2d(16, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace)(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(downsample): Sequential((0): Conv2d(16, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(1): ResidualBlock((conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace)(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(layer3): Sequential((0): ResidualBlock((conv1): Conv2d(32, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(downsample): Sequential((0): Conv2d(32, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(1): ResidualBlock((conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(avg_pool): AvgPool2d(kernel_size=8, stride=8, padding=0)(fc): Linear(in_features=64, out_features=10, bias=True)
)网络结构的图

虽然我是个学渣但是不妨碍我学习啊,希望这个图能帮助到有希望看具体网络连接图的你,









![[NCTF2019]SQLi 1regexp注入](https://img-blog.csdnimg.cn/4c262ff483944f478d13a83053002daf.png)
![buuctf-[NCTF2019]Keyboard](https://img-blog.csdnimg.cn/0d2cd646c0514b2198e62508d8e3c204.jpg)

![[NCTF2019]Fake XML cookbook](https://img-blog.csdnimg.cn/98fc6bd960dd496585955723c35c48fb.png)
![[NCTF2019]True XML cookbook](https://img-blog.csdnimg.cn/20210804132458265.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3FxXzUyOTA3ODM4,size_16,color_FFFFFF,t_70)
![[NCTF2019]Sore](https://img-blog.csdnimg.cn/33348eac02774c0a82a5420314156de5.png)
![[NCTF 2018]Easy_Audit](https://img-blog.csdnimg.cn/2771ba9438c645f998e2ce26895cc89c.png)