Hough变换
- 一、标准Hough线变换(SHT)
- 1.1 原理
- 1.2 SHT步骤
- 1.3 缺点
- 二、渐进概率Hough变换(PPHT)
- 2.1 原理及步骤
- 2.2 缺点
- 三、Hough圆变换
- 3.1 原理及步骤
- 3.2 缺点
- 四、实验代码
一、标准Hough线变换(SHT)
1.1 原理
标准Hough变换(standard hough transform)
图像平面中的一条直线可以通过斜截式y = ax+b来表示,即可以化为a-b平面中的一个点,但是因为斜率的区间为-∞到+∞变化,当直线接近竖直时,此时在a-b平面中是难以表示的,因此通过极坐标形式能够更加方便地表示。

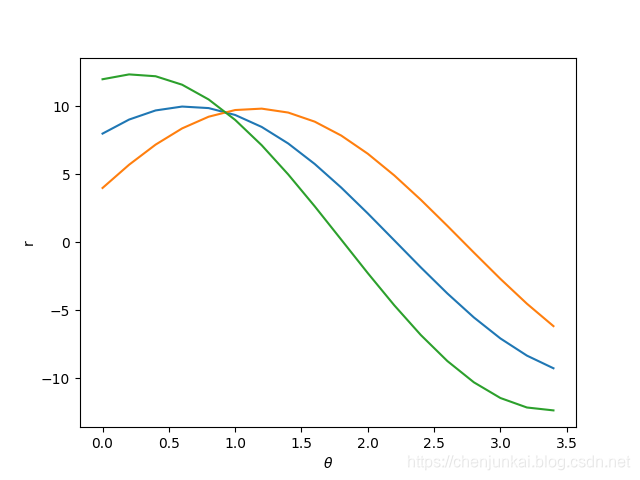
如图(A)所示,在图像平面中,一个点可以通过横纵坐标来表示;而图像平面中的一条直线可以通过距离原点的距离ρ,以及垂线的角度θ来表示,将其转换到θ-ρ平面中如(C)所示,即图像平面中的一条直线可由θ-ρ平面中的一个点表示。因此图像平面中的一个点可以由穿过它的直线族在θ-ρ平面中对应的点组成的曲线来表示。如(C)所示,虚线对应(B)中的直线1,2,3,4的交叉点。可以得到在θ-ρ平面中两条曲线的交点即为图像平面中的两个点共线的一条直线。
1.2 SHT步骤
因此标准霍夫线变换的步骤就很明了了:
① 首先对图片img进行边缘检测得到二值边缘图像edge_img
② 对于edge_img中的每个非0点都转换为θ-ρ平面中的一条曲线
转换方法如下:
对于图像平面中的一个非0点(x0,y0),使θ由0向2π变化,分别通过下式计算所对应的ρ值,

可以得到一系列点,这些点组成点(x0,y0)在θ-ρ平面中对应的曲线。
③ 在θ-ρ中进行对所有结果进行累加,则图像平面中的直线将显示为θ-ρ平面中的局部极大值。
④ 根据所设定的阈值对局部极大值进行筛选,得到最终的结果
1.3 缺点
标准霍夫线变换(SHT)是不能提取出线的端点的,并且耗时较长
OpenCV函数原型
//函数HoughLines的原型为:
void HoughLines(
InputArray image, //输入图像,要求是单通道的二值图像
OutputArray lines, //输出直线向量,两个元素的向量(ρ,θ)代表一条直线,原点为图像左上角
double rho, //距离分辨率,单位为像素
double theta, //角度分辨率,单位为弧度
int threshold, // 阈值,用于筛选p-θ平面的极大值,实际指明了返回的直线至少包含的点的数量
double srn=0, // srn与stn是用于多尺度Hough变换(MHT)的参数,与标准hough变换无关
,double stn=0)
//其中rho和theta两个分辨率参数的作用还没仔细研究
多尺度hough变换(MHT)是对SHT的细化,精度更高(是通过srn,stn这两个参数对标准huogh变换的结果进行精确化)
二、渐进概率Hough变换(PPHT)
2.1 原理及步骤
渐进概率Hough变换(Progressive Probabilistic Hough Transform)是对SHT的改进,能够极大的减少计算时间,并且能够计算出直线的端点:
其主要原理是:在Edge图像中随机选择像素,将这些像素点按照SHT中的方法转换到累加平面(p-θ)。 当在累加平面中可以通过阈值筛选出一条直线时,沿该条直线搜索Edge图像,以查看是否存在一个或多个有限长度的线。然后在该直线的所有像素被从Edge图像中除去。通过这种方式,算法返回有限长度的直线。
该算法可以概括如下:
①创建输入边 Edge 图像(IMG1)的副本(IMG2)。
②用从 IMG2 随机选择的像素更新累加器。
③从 IMG2 中删除像素。
④如果修改的累加器(BINX)中具有最大值的较低阈值,转到第1点。
⑤沿着由BINX指定的线在 IMG1 中搜索,找到连续或间隙不超过给定阈值的间隔的最长像素段。
⑥从 IMG2 中删除段中的像素,清除BINX。
⑦如果检测到的线段比给定的最小长度长,请将其添加到输出列表中。
⑧转到第2点
2.2 缺点
该算法的一个问题是,多次运行可能会产生不同的结果。 如果许多直线共享像素,则会出现这种情况。如果两条线交叉,要检测的第一条线将去除公共像素(以及其周围的部分),从而导致另一条线上出现凹陷。 如果多条线交叉,则许多像素可能会错过最后一行,并且累加器中的投票可能无法达到阈值。
OpenCV函数:
void HoughLinesP(
InputArray image, //输入图像,要求是单通道的二值图像
OutputArray lines, //输出直线向量,为四通道向量,分别是线段的两个端点的坐标:(x0,y0,x1,y1)
double rho, //距离分辨率,单位为像素
double theta, //角度分辨率,单位为弧度
int threshold, // 阈值,用于筛选p-θ平面的极大值,实际指明了返回的直线至少包含的点的数量
double minLineLength=0, // 线段长度阈值
,double maxLineGap=0 //线段之间的间隔阈值)
三、Hough圆变换
3.1 原理及步骤
Hough圆变换的原理与前文的Hough线变换相似,Hough线变换是在p-θ平面中不断累加,最后寻找极大值点,Hough圆变换也可以通过类似的方式寻找,需要在三维空间中累加体积,三维分别是圆心的横坐标、纵坐标、半径,但是这样时间复杂度和空间复杂度会非常大,所以实际实现时没有采用这种方法。OpenCV中的Hough圆变换是通过Hough梯度法实现的。
首先看一张图:
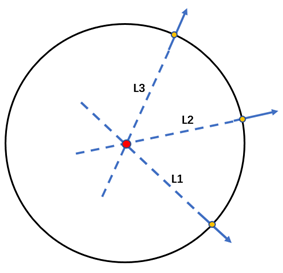
可以看到圆上的每一个点(橙色点)都存在一条线(蓝色虚线)相交于圆心(红点),而这些线就是各个点的梯度方向(蓝色箭头)所在的直线。圆心是它们的交点,这就与Hough线变换中的累加平面非常相似了,此时将所有直线都累加起来,圆心就是一个局部极大值点!
所以Hough圆变换就可以通过下面的方法实现了:
① 同样的,首先对图像进行边缘检测,得到edge_img;
② 对edge_img中的每一个非0点计算局部梯度(可以通过Sobel算子计算)
③ 沿着每个点的梯度所在的直线在累加平面中进行累加,同时记录非0点的位置
④ 根据阈值选取累加平面中的局部极大值点作为候选圆心
⑤ 对于每个圆心都有一个与它相关的非0点的列表(步骤③中记录的),计算这些非0点与该圆心的距离,从中选取出最优值作为半径
⑥ 如果有足够数量的点构成圆且该圆心与其它圆心间距超过阈值,就保留这个圆
⑦ 最终就能够得到检测结果
3.2 缺点
①累加器阈值过低时速度会非常慢,因为需要考虑每个非0点
②对每个圆心只能选一个圆,同心圆时只能检测到一个
③Sobel计算的是局部梯度,所以会出现噪音,稳定性略低
OpenCV函数:
//HoughCircles中调用了Canny函数,因此不需要另外对图像进行边缘检测
void HoughCircles(
InputArray image, //输入图像,要求是8位图像,即灰度图,因为需要计算梯度,使用灰度图更精准,与HoughLines中要求二值图像不同
OutputArray circles, //输出,为矩阵或者向量,矩阵的话就是F32C3的数组,三个通道分别为圆心坐标和半径;向量的话就是vector<Vec3f>类型
int method, //实际设置为cv::HOUGH_GRADIENT
double dp, //累加图像的分辨率,需要大于等于1
double minDist, // 圆之间的最小距离阈值
double param1=100, //用于Canny中的高阈值,Canny的低阈值设为它的一半
double param2=100 //累加器阈值,与HoughLines中的threshold类似
int minRadius = 0, //最小半径阈值
int maxRadius = 0 //最大半径阈值
)
四、实验代码
void hough_test()
{Mat src = imread("../Images/10.jpg");if (src.empty()) { cout << "read the image failed!!!!!!" << endl;}//读入灰度图,用于hough圆变换检测Mat src_circles = imread("../Images/11.jpg");Mat src_circles_gray;cv::cvtColor(src_circles, src_circles_gray, cv::COLOR_BGR2GRAY);Mat src_PPHT;src.copyTo(src_PPHT);Mat edge_img;vector<Vec2f> hough_lines;vector<Vec4f> hough_P_lines;vector<Vec3f> hough_circles;//图像的宽和高int w = src.cols;int h = src.rows;//Canny滤波Canny(src, edge_img, 50, 150);//SHT 标准hough线变换HoughLines(edge_img, hough_lines, 1, CV_PI/180, 130);//PPHT 渐进hough线变换HoughLinesP(edge_img, hough_P_lines, 1, CV_PI / 180, 130, 20, 100);//Hough圆变换HoughCircles(src_circles_gray, hough_circles, cv::HOUGH_GRADIENT, 2, 50, 100, 100, 10, 300);//在原图上绘制SHT检测出的直线for (auto& line_iter : hough_lines){float rho = line_iter[0];float theta = line_iter[1];Point point1, point2;point1.x = rho*cos(theta) + w*sin(theta);point1.y = rho*sin(theta) - w*cos(theta);point2.x = rho*cos(theta) - w*sin(theta);point2.y = rho*sin(theta) + w*cos(theta);line(src, point1, point2, Scalar(0, 255, 0), 2,8);}//绘制PPHT检测到的直线for (auto& line_iter : hough_P_lines){line(src_PPHT, Point(line_iter[0], line_iter[1]), Point(line_iter[2], line_iter[3]),Scalar(0,0,255),2,8);}//绘制Hough圆变换检测到的圆for (auto& circles : hough_circles){circle(src_circles, Point(circles[0], circles[1]), circles[2], Scalar(0,0,255), 2);}namedWindow("src_SHT", WINDOW_NORMAL);imshow("src_SHT", src);namedWindow("src_PPHT", WINDOW_NORMAL);imshow("src_PPHT", src_PPHT);namedWindow("edge_img", WINDOW_NORMAL);imshow("edge_img", edge_img);namedWindow("circles_img", WINDOW_NORMAL);imshow("circles_img", src_circles);waitKey(0);
}
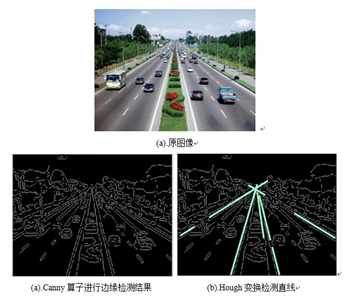
实验结果如图:


参考资料:
《学习OpenCV3》
https://sikasjc.github.io/2018/04/20/Hough/
https://blog.csdn.net/qq_37059483/article/details/77891698
最后,如有错误的地方还请大佬指正,同时欢迎一起讨论,转载请注明出处