随处可见的红黑树详解
- 前言
- 为什么要有红黑树
- 二叉搜索树
- 平衡二叉搜索树
- 红黑树
- 红黑树的应用场景
- 红黑树的性质(重点)
- 红黑树的定义
- 红黑树的左旋与右旋
- 红黑树插入结点与插入维护红黑树的三种情况
- 插入结点
- 插入结点后维护红黑树
- 父结点是爷结点是左子树
- 1. 叔结点是红色的
- 2. 叔结点是黑色的且新结点是左子树
- 3. 叔结点是黑色的且新结点是右子树
- 父结点是爷结点是右子树
- 1. 叔结点是红色的
- 2. 叔结点是黑色的且新结点是左子树
- 3. 叔结点是黑色的且新结点是右子树
- 维护代码
- 红黑树删除结点与删除维护红黑树的四种情况
- 删除结点
- 删除结点后维护红黑树
- 当前结点是父结点的左子树的情况
- 1. 当前结点的兄弟结点是红色的
- 2. 当前结点的兄弟结点是黑色的,而且兄弟结点的两个孩子结点都是黑色的
- 3. 当前结点的兄弟结点是黑色的,而且兄弟结点的左孩子是红色的,右孩子是黑色的
- 4. 当前结点的兄弟结点是黑色的,而且兄弟结点的左孩子是黑色的,右孩子是红色的
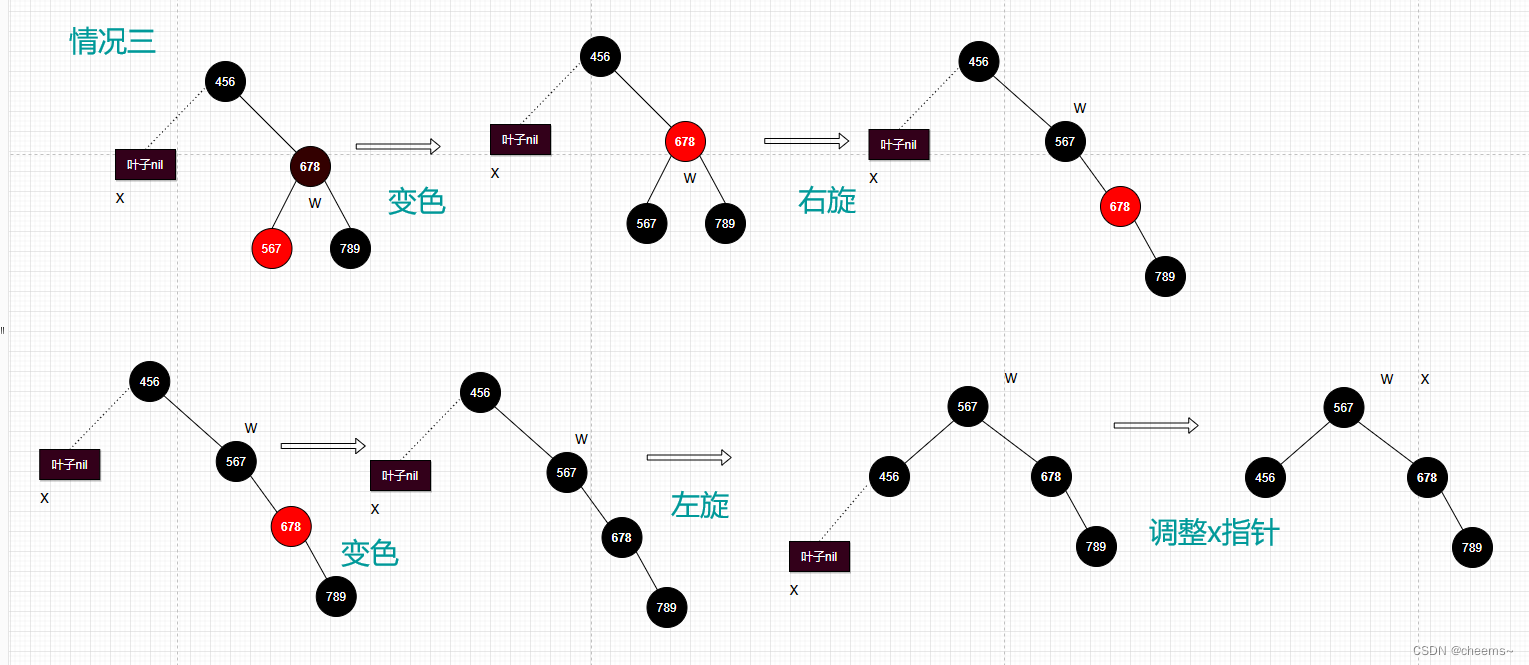
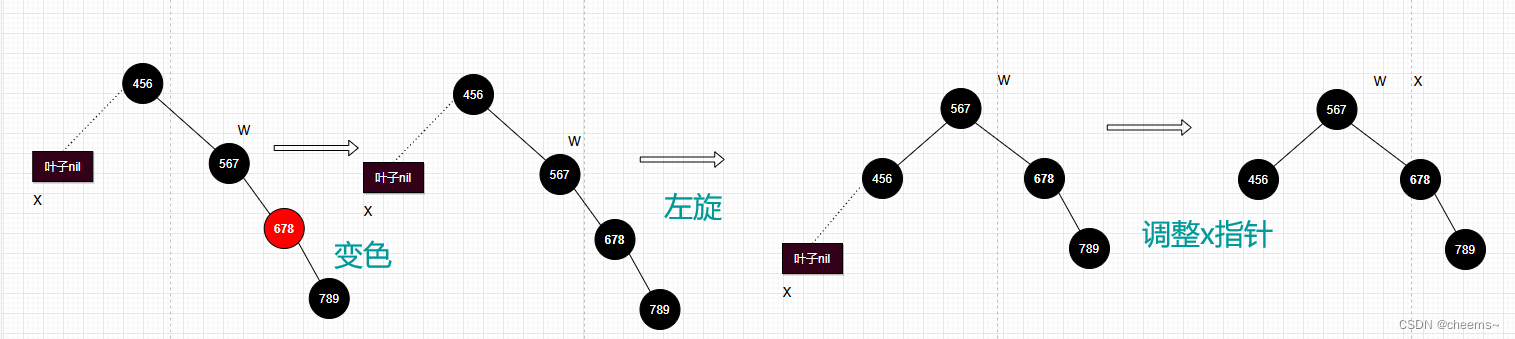
- 当前结点是父结点的右子树的情况
- 1. 当前结点的兄弟结点是红色的
- 2. 当前结点的兄弟结点是黑色的,而且兄弟结点的两个孩子结点都是黑色的
- 3. 当前结点的兄弟结点是黑色的,而且兄弟结点的左孩子是黑色的,右孩子是红色的
- 4. 当前结点的兄弟结点是黑色的,而且兄弟结点的左孩子是红色的,右孩子是黑色的
- 维护代码
- 红黑树的遍历、查询、测试
前言
刚开始接触红黑树的时候,感觉很难。其实不然,红黑树只是情况分的多了一点而已,相较于线段树,主席树等等,简单多了。对于红黑树3种插入维护4种删除维护没必要去记忆,稍作了解,对于红黑树的性质和特点,需要特别记忆。
本专栏知识点是通过零声教育的线上课学习,进行梳理总结写下文章,对c/c++linux课程感兴趣的读者,可以点击链接 C/C++后台高级服务器课程介绍 详细查看课程的服务。
注意,本文图中红黑树的叶子结点默认不画出来
为什么要有红黑树
二叉搜索树
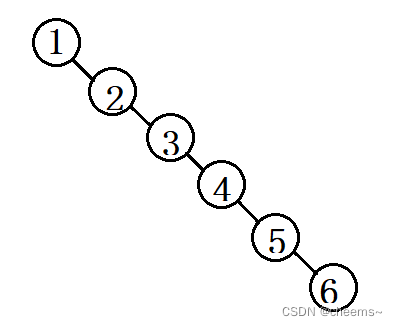
二叉搜索树(又叫二叉排序树,BST):对于任意一个结点,其左子树的值必定小于该结点,其右子树的值必定大于该结点。那么中序遍历的时候,就是有序的了。理论上来说,增加,删除,修改的时间复杂度都是O(log(N))。但是它存在一个致命的问题。
退化:向树中插入[1,2,3,4,5,6],此时树退化成了一个链表,增加,删除,修改的时间复杂度退化为O(N)
平衡二叉搜索树
平衡二叉搜索树(AVL Tree):它的左右两个子树的高度差的绝对值不超过1,并且左右两个子树都是一棵平衡二叉搜索树。如果向树中插入[1,2,3,4,5,6]
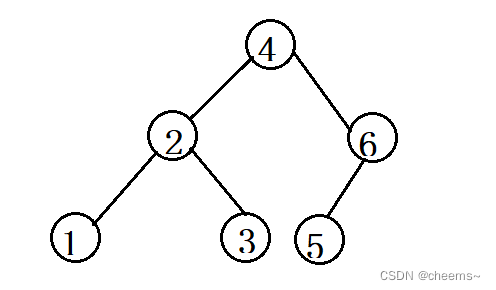
可以看到AVLTree在最坏的情况下,依然保持了“绝对的平衡”:左右两个子树的高度差的绝对值不超过1。那么AVL Tree是如何保证平衡的呢,是通过旋转,可以看到,无论是插入还是删除元素,都要去通过旋转维护整个树的平衡。
-
AVL查询元素:O(log(N))
-
AVL插入元素:最多一次旋转O(1),加上查询的时间O(log(N)),插入的复杂度O(log(N))
-
AVL删除元素:必须检查从删除结点开始到根结点路径上的所有结点的平衡因子。因此删除的代价比较大,删除最多需要log(N)次旋转,加上查询的时间,删除的复杂度O(2log(N))
红黑树
我们发现,AVL树未免太严格了一些,有没有一种数据结构,能让AVL树不那么严格平衡,降低维护平衡的开销,同时又不能像BST一样退化呢?
当然有,就是本文所写的红黑树(rbTree):
-
rbTree查询元素:O(log(N))
-
rbTree插入元素:插入最多2次旋转,加上查询的时间O(log(N)),插入的复杂度O(log(N))
-
rbTree删除元素:删除最多需要3次旋转,加上查询的时间,删除的复杂度O(log(N))
虽然插入和删除元素后,需要旋转和变色(本文中统一为维护),但是这一时间复杂度可以估算为O(1)不计
因为rbTree的第6条性质(见下文)
- 所以红黑树的查询效率略低与AVL的查询
- 红黑树和AVL插入的速度差不多
- 红黑树删除的速度比AVL快,因为AVL删除最多需要og(N)次旋转
红黑树的应用场景
- c++ stl map,set(红黑树的封装)
- 进程调度cfs(用红黑树存储进程的集合,把调度的时间作为key,那么树的左下角时间就是最小的)
- 内存管理(每次使用malloc的时候都会分配一块小内存出来,那么这么块就是用红黑树来存,如何表述一段内存块呢,用开始地址+长度来表示,所以key->开始地址,val->大小)
- epoll中使用红黑树管理socketfd
- nginx中使用红黑树管理定时器,中序遍历第一个就是最小的定时器
红黑树的性质(重点)
1. 每个结点是红的或者黑的
2. 根结点是黑的
3. 每个叶子结点是黑的(因为这条性质,一般用叶子结点在代码中被特殊表示)
4. 如果一个结点是红的,则它的两个儿子都是黑的(不存在相邻红色)
5. 从任一节点到叶子节点,所包含的黑色节点数目相同(即黑高度相同)
6. 最长路径长度不超过最短路径长度的2倍(2n-1,一条黑红黑红…一条全黑)
红黑树的定义
#define RED 0
#define BlACK 1typedef int KEY_TYPE;typedef struct _rbtree_node {unsigned char color;//颜色struct _rbtree_node *left;//左子树struct _rbtree_node *right;//右子树struct _rbtree_node *parent;//父结点KEY_TYPE key;void *value;} rbtree_node;//红黑树结点typedef struct _rbtree {rbtree_node *root;//根结点rbtree_node *nil;//通用叶子结点
} rbtree;//红黑树
红黑树的左旋与右旋
动三个方向,改6个指针。
通过旋转,调整左右高度,使树达到平衡。
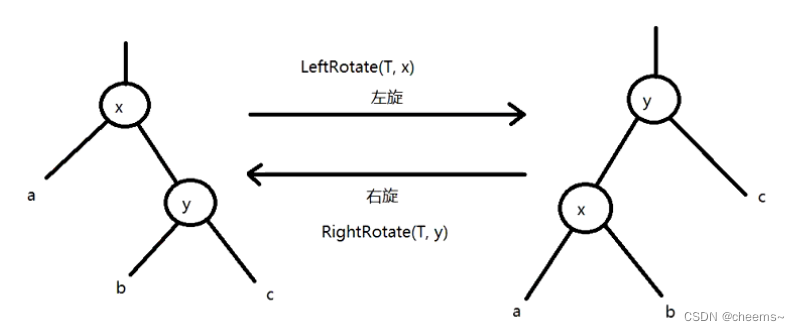
左旋leftRotate(T,x)—中右->左中
降低X结点的高度,提高X结点右结点(即Y)的高度。
- x的右子树指向y的左子树
- 本来指向x结点的父指针,改成指向y
- y的左子树指向x结点

右旋rightRotate(T,y)—中左->中右
降低Y结点的高度,提高Y结点左结点(即X)的高度。
- y的左子树指向x的右子树
- 本来指向y结点的父指针,改成指向x
- x的右子树指向y结点

//左旋leftRotate(T,x)---中右->左中
//降低X结点的高度,提高X结点右结点(即Y)的高度。
void _left_rotate(rbtree *T, rbtree_node *x) {rbtree_node *y = x->right;//1x->right = y->left;//x的右子树指向y的左子树if (y->left != T->nil) {y->left->parent = x;//y的左子树的父节点指向x}//2y->parent = x->parent;//y的父结点指向x的父结点if (x->parent == T->nil) {//如果x是根结点T->root = y;} else if (x == x->parent->left) {x->parent->left = y;//本来指向x结点的父指针,改成指向y} else {x->parent->right = y;}//3y->left = x;//y的左子树指向x结点x->parent = y;//x的父节点指向y
}//右旋
//copy左旋的代码
//left改成right,right改成left
//x改成y,y改成x
void _right_rotate(rbtree *T, rbtree_node *y) {rbtree_node *x = y->left;//1y->left = x->right;if (x->right != T->nil) {x->right->parent = y;}//2x->parent = y->parent;if (y->parent == T->nil) {T->root = x;} else if (y == y->parent->right) {y->parent->right = x;} else {y->parent->left = x;}//3x->right = y;y->parent = x;
}
红黑树插入结点与插入维护红黑树的三种情况
插入结点
在插入结点时,我们始终认为“插入这个结点之前,原来的红黑树是满足红黑树性质的==”,那么插入的位置容易找,就是不断的对比key,最终找到位置,那么新增的结点是什么颜色呢?我们通过性质发现:
- 如果新结点是黑色,违背了第5条性质
- 如果新结点是红色,可能违背第4条性质
而第四条性质,我们可以通过旋转与上色的方式修复,所以在我们插入结点的时候,我们始终认为新结点是红色
//因为传入的key可能是字符,可能是整形,所以要提取出来
//这里可以看出,其实可以封装成一个模板
int key_compare(KEY_TYPE a, KEY_TYPE b) {//这里假设是intif (a > b) {return 1;} else if (a < b) {return -1;} else {return 0;}
}
void rbtree_insert(rbtree *T, rbtree_node *z) {//找位置rbtree_node *x = T->root;rbtree_node *y = T->nil;//y是x的父节点while (x != T->nil) {//二分找位置y = x;if (key_compare(z->key, x->key) < 0) {x = x->left;} else if (key_compare(z->key, x->key) > 0) {x = x->right;} else {//如果key相等,看自己的业务情景//重复插入可以不修改直接退出,可以修改valreturn;}}//插入z->parent = y;if (y == T->nil) {T->root = z;} else if (key_compare(z->key, y->key) < 0) {y->left = z;} else {y->right = z;}z->left = T->nil;z->right = T->nil;z->color = RED;//维护红黑树rbtree_insert_fixup(T, z);
}
插入结点后维护红黑树
我们知道新增结点是红色,如果新结点是父节点也是红色,那么就需要维护红黑树了。
如果父结点是爷结点是左子树,可以归纳出来三种情况。同理如果父结点是爷结点是右子树,我们也可以归纳出来三种情况。但是这三种情况的差异就是旋转方向的区别而已。一共是6种情况,但是归纳出来其实是3种,读者不要搞错了。
在下面的图中:z表示新增结点,y表示叔结点
父结点是爷结点是左子树
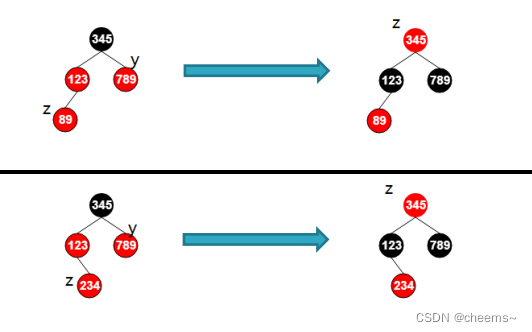
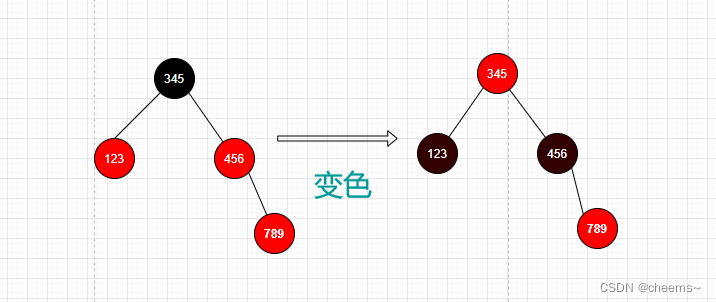
1. 叔结点是红色的
- 将叔结点和父结点变黑,爷结点变红
- 将当前结点变成爷结点(因为爷结点是红,爷结点的父节点也可能是红,所以要递归维护)
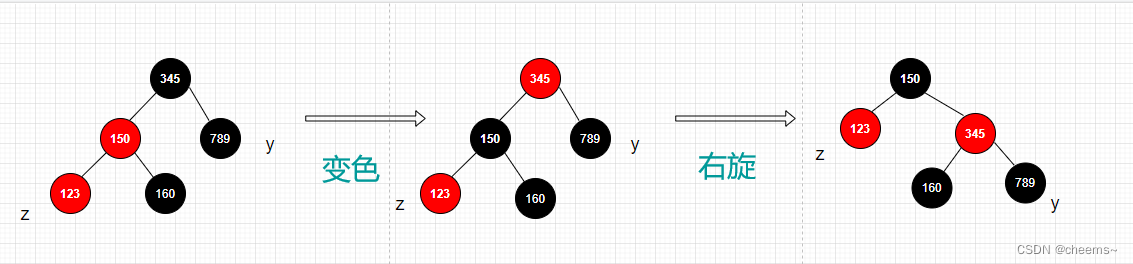
2. 叔结点是黑色的且新结点是左子树
- 将父结点变成黑色,爷结点变成红色
- 以爷结点为中心右旋
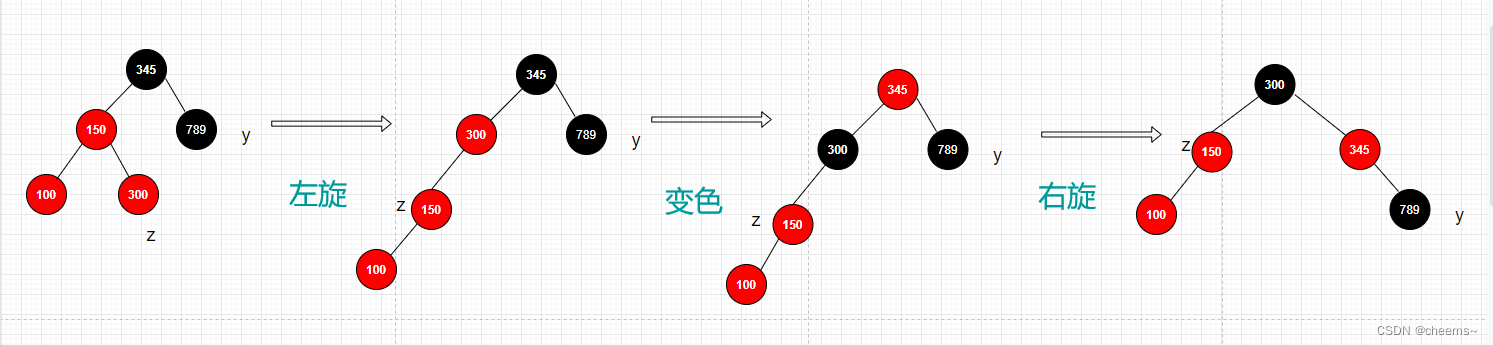
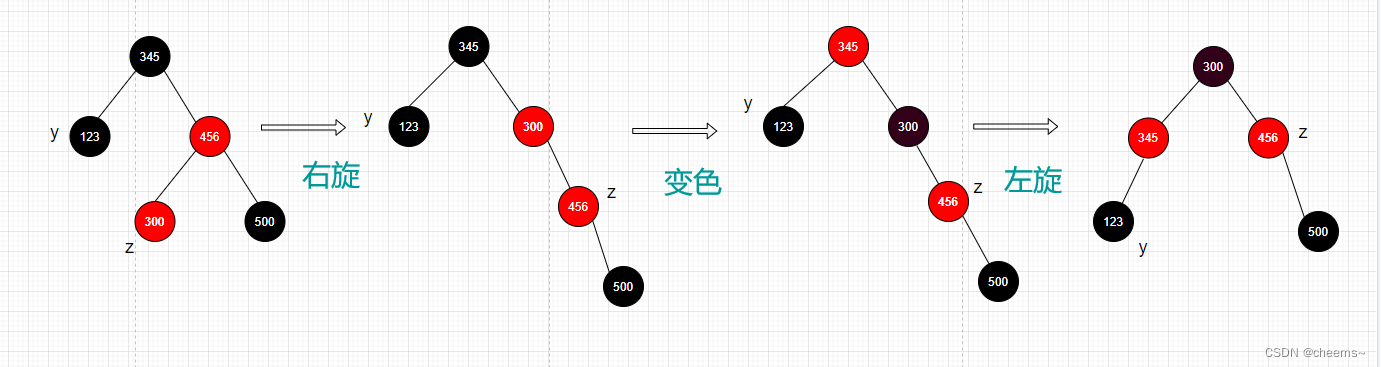
3. 叔结点是黑色的且新结点是右子树
- 以父结点为中心左旋
- 将父结点变黑色,爷结点变红色
- 以爷结点为中心右旋
父结点是爷结点是右子树
1. 叔结点是红色的
- 将叔结点和父结点变黑,爷结点变红
- 将当前结点变成爷结点(因为爷结点是红,爷结点的父节点也可能是红,所以要递归维护)
2. 叔结点是黑色的且新结点是左子树
- 以父结点为中心右旋
- 将父结点变黑色,爷结点变红色
- 以爷结点为中心左旋
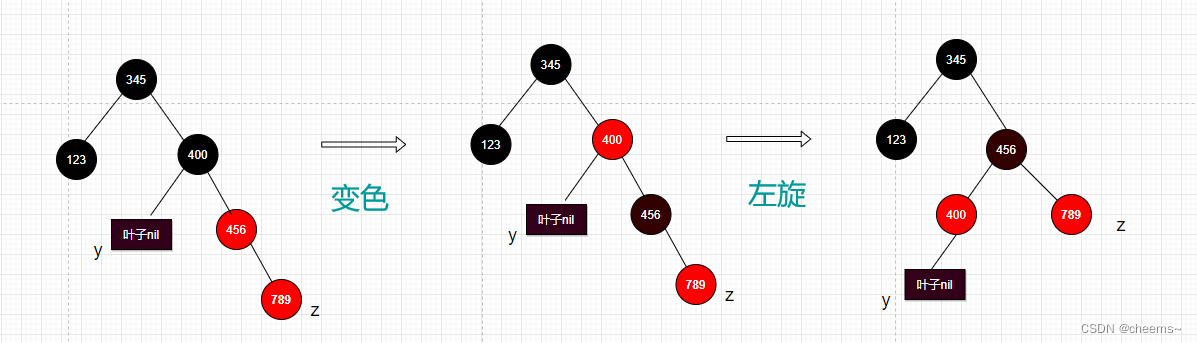
3. 叔结点是黑色的且新结点是右子树
- 将父结点变成黑色,爷结点变成红色
- 以爷结点为中心左旋
维护代码
//修复第4条性质
void rbtree_insert_fixup(rbtree *T, rbtree_node *z) {while (z->parent->color == RED) {//父结点是红色的,需要调整if (z->parent == z->parent->parent->left) {//如果父结点是爷结点是左子树rbtree_node *y = z->parent->parent->right;//叔结点if (y->color == RED) {//叔结点是红色的//先变色,叔,父变黑z->parent->color = BLACK;y->color = BLACK;//爷结点变红z->parent->parent->color = RED;//下面的调整完了,调整上面z = z->parent->parent;} else {//叔父结点是黑色if (z == z->parent->right) {//新节点是在右边z = z->parent;rbtree_left_rotate(T, z);}z->parent->color = BLACK;z->parent->parent->color = RED;rbtree_right_rotate(T, z->parent->parent);}} else {// 如果父结点是爷结点是右子树rbtree_node *y = z->parent->parent->left;//叔父结点if (y->color == RED) {//叔父结点是红色的//先变色,叔,父变黑z->parent->color = BLACK;y->color = BLACK;//爷结点变红z->parent->parent->color = RED;//下面的调整完了,调整上面z = z->parent->parent;} else {//叔父结点是黑色if (z == z->parent->left) {//新节点是在左边z = z->parent;rbtree_right_rotate(T, z);}z->parent->color = BLACK;z->parent->parent->color = RED;rbtree_left_rotate(T, z->parent->parent);}}}//最后别忘了根节点始终是黑色T->root->color = BLACK;
}
红黑树删除结点与删除维护红黑树的四种情况
删除结点
我们定义:
- 覆盖结点:z(被指定删除的结点,实际上被覆盖)
- 删除结点:y(实际上被删除的结点,一般是后继结点)
- 轴心结点:x(维护红黑树的结点)
红黑树删除结点根据改结点的左右子树分为三种情况:
- 没有左右子树
- 有且仅有一个子树
- 左右子树都有
对不同情况的处理:
- 情况1:直接删除该结点
- 情况2:将该结点的唯一子树挂到父结点上,然后删除该结点
- 情况3:找一个删除结点y(后继结点)覆盖 指定结点z,然后删除 删除结点y,对于这个删除结点y来说,它的情况一定是情况1或情况2
删除代码
rbtree_node *rbtree_mini(rbtree *T, rbtree_node *x) {while (x->left != T->nil) {x = x->left;}return x;
}//找后继结点
rbtree_node *rbtree_successor(rbtree *T, rbtree_node *x) {rbtree_node *y = x->parent;//右子树不为空,则找右子树中最左的元素if (x->right != T->nil) {return rbtree_mini(T, x->right);}//找到结点第一个父结点while ((y != T->nil) && (x == y->right)) {x = y;y = y->parent;}return y;
}//覆盖结点z
//删除结点y
//轴心结点x
rbtree_node *rbtree_delete(rbtree *T, rbtree_node *z) {rbtree_node *y = T->nil;rbtree_node *x = T->nil;if ((z->left == T->nil) || (z->right == T->nil)) {y = z;//如果没有孩子或只有一个} else {//如果有两个子树则找后继y = rbtree_successor(T, z);}//一般x是y的右子树,找到轴心结点if (y->left != T->nil) {x = y->left;} else if (y->right != T->nil) {x = y->right;}//将该结点的唯一子树挂到父结点上,然后删除该结点x->parent = y->parent;if (y->parent == T->nil) {//根结点T->root = x;} else if (y == y->parent->left) {y->parent->left = x;} else {y->parent->right = x;}//进行覆盖操作if (y != z) {z->key = y->key;z->value = y->value;}//黑色才需要调整if (y->color == BLACK) {rbtree_delete_fixup(T, x);}return y;
}
删除结点后维护红黑树
想一想,删除一个结点,该结点是什么颜色的时候才需要维护红黑树呢?
- 如果是红色,没有违反任何性质。所以如果是红色直接删除即可,无需维护
- 如果是黑色,黑色被删除,那么必定违反第5条性质,破坏了黑高,所以我们需要针对这一情况进行维护
如果当前结点是父结点的左子树的情况,可以归纳出来四种情况。同理如果当前结点是父结点的右子树,我们也可以归纳出来四种情况。但是这四种情况的差异就是旋转方向的区别而已(镜像的)。一共是8种情况,但是归纳出来其实是4种,读者不要搞错了。
当前结点是父结点的左子树的情况
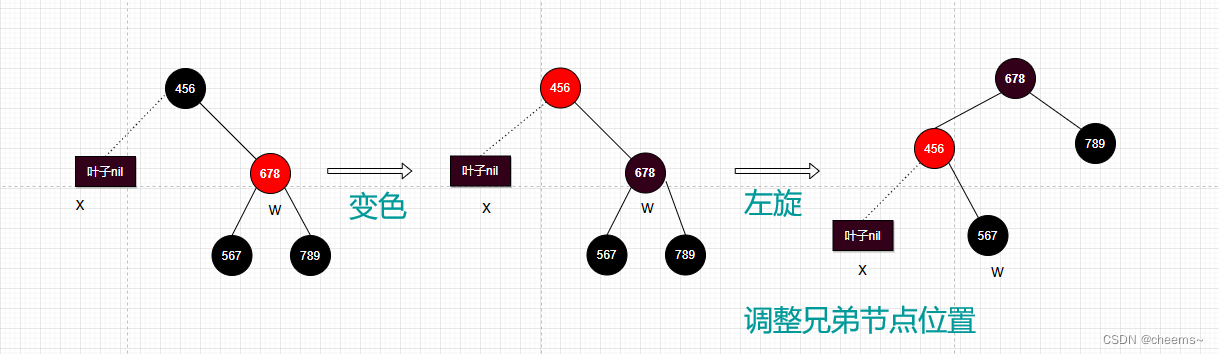
1. 当前结点的兄弟结点是红色的
- 兄弟节点变成黑色
- 父节点变成红色
- 父节点做左旋
- 将兄弟结点调整为父节点的右子树
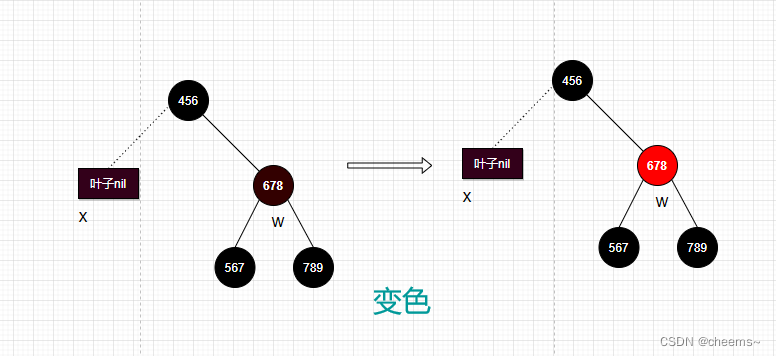
2. 当前结点的兄弟结点是黑色的,而且兄弟结点的两个孩子结点都是黑色的
- 兄弟节点变成红色
- 轴心结点变为父节点
3. 当前结点的兄弟结点是黑色的,而且兄弟结点的左孩子是红色的,右孩子是黑色的
-
将左孩子涂黑
-
将兄弟节点变红
-
对兄弟节点右旋
-
将兄弟结点调整为父节点的右子树
-
现在情况3就会变成情况4,接着做情况4的步骤
4. 当前结点的兄弟结点是黑色的,而且兄弟结点的左孩子是黑色的,右孩子是红色的
- 将兄弟节点换成父节点的颜色
- 把父节点和兄弟节点的右孩子涂黑
- 对父节点做左旋
- 设置x指针,指向根节点
当前结点是父结点的右子树的情况
1. 当前结点的兄弟结点是红色的
-
兄弟节点变成黑色
-
父节点变成红色
-
父节点做右旋
-
将兄弟结点调整为父节点的左子树
2. 当前结点的兄弟结点是黑色的,而且兄弟结点的两个孩子结点都是黑色的
-
兄弟节点变成红色
-
轴心结点变为父节点
3. 当前结点的兄弟结点是黑色的,而且兄弟结点的左孩子是黑色的,右孩子是红色的
-
将右孩子变黑
-
将兄弟节点变红
-
对兄弟结点左旋
-
将兄弟结点调整为父节点的左子树
-
现在情况3就会变成情况4,接着做情况4的步骤
4. 当前结点的兄弟结点是黑色的,而且兄弟结点的左孩子是红色的,右孩子是黑色的
-
将兄弟节点换成父节点的颜色
-
把父节点和兄弟节点的左孩子变黑
-
对父节点做右旋
-
将轴心结点调整为根结点
维护代码
void rbtree_delete_fixup(rbtree *T, rbtree_node *x) {//如果x是红色,变成黑色,如果x是黑色,需要调整while ((x != T->root) && (x->color == BLACK)) {//当前结点是父结点的左子树if (x == x->parent->left) {//兄弟节点rbtree_node *w = x->parent->right;// 情况1:兄弟节点为红色if (w->color == RED) {// 兄弟节点变成黑色w->color = BLACK;// 父节点变成红色x->parent->color = RED;// 父节点做左旋rbtree_left_rotate(T, x->parent);//将兄弟结点调整为父节点的右子树w = x->parent->right;}// 情况2:兄弟节点是黑色的,且兄弟的左孩子和右孩子都是黑色if ((w->left->color == BLACK) && (w->right->color == BLACK)) {// 兄弟节点变成红色w->color = RED;// 轴心结点变为父节点x = x->parent;} else {// 情况3:x的兄弟节点是黑色的,兄弟的左孩子是红色,右孩子是黑色if (w->right->color == BLACK) {// 将左孩子涂黑w->left->color = BLACK;// 将兄弟节点变红w->color = RED;// 对兄弟节点右旋rbtree_right_rotate(T, w);// 重新设置x的兄弟节点w = x->parent->right;}// 情况4:x的兄弟节点是黑色;x的兄弟节点的右孩子是红色的// 将兄弟节点换成父节点的颜色w->color = x->parent->color;// 把父节点和兄弟节点的右孩子涂黑x->parent->color = BLACK;w->right->color = BLACK;// 对父节点做左旋rbtree_left_rotate(T, x->parent);// 设置x指针,指向根节点x = T->root;}} else {//当前结点是父结点的右子树//兄弟节点rbtree_node *w = x->parent->left;//情况1:兄弟结点为红色if (w->color == RED) {// 兄弟节点变成黑色w->color = BLACK;// 父节点变成红色x->parent->color = RED;// 父节点做右旋rbtree_right_rotate(T, x->parent);//将兄弟结点调整为父节点的左子树w = x->parent->left;}// 情况2:兄弟节点是黑色的,且兄弟的左孩子和右孩子都是黑色if ((w->left->color == BLACK) && (w->right->color == BLACK)) {// 兄弟节点变成红色w->color = RED;// 轴心结点变为父节点x = x->parent;} else {// 情况3:x的兄弟结点是黑色的,兄弟的左孩子是黑色,右孩子是红色if (w->left->color == BLACK) {//将右孩子变黑w->right->color = BLACK;//将兄弟节点变红w->color = RED;//对兄弟结点左旋rbtree_left_rotate(T, w);//将兄弟结点调整为父节点的左子树w = x->parent->left;}// 情况4:x的兄弟结点是黑色的,兄弟的左孩子是红色,右孩子是黑色// 将兄弟节点换成父节点的颜色w->color = x->parent->color;// 把父节点和兄弟节点的左孩子变黑x->parent->color = BLACK;w->left->color = BLACK;// 对父节点做右旋rbtree_right_rotate(T, x->parent);//将轴心结点调整为根结点x = T->root;}}}// 继承节点变为黑色,为了弥补失去的黑高x->color = BLACK;
}
红黑树的遍历、查询、测试
rbtree_node *rbtree_search(rbtree *T, KEY_TYPE key) {rbtree_node *node = T->root;while (node != T->nil) {if (key < node->key) {node = node->left;} else if (key > node->key) {node = node->right;} else {return node;}}return T->nil;
}void rbtree_traversal(rbtree *T, rbtree_node *node) {if (node != T->nil) {rbtree_traversal(T, node->left);printf("key:%d, color:%d\n", node->key, node->color);rbtree_traversal(T, node->right);}
}int main() {int keyArray[20] = {24, 25, 13, 35, 23, 26, 67, 47, 38, 98, 20, 19, 17, 49, 12, 21, 9, 18, 14, 15};rbtree *T = (rbtree *) malloc(sizeof(rbtree));if (T == NULL) {printf("malloc failed\n");return -1;}T->nil = (rbtree_node *) malloc(sizeof(rbtree_node));T->nil->color = BLACK;T->root = T->nil;rbtree_node *node = T->nil;int i = 0;for (i = 0; i < 20; i++) {node = (rbtree_node *) malloc(sizeof(rbtree_node));node->key = keyArray[i];node->value = NULL;rbtree_insert(T, node);}rbtree_traversal(T, T->root);printf("----------------------------------------\n");for (i = 0; i < 20; i++) {rbtree_node *node = rbtree_search(T, keyArray[i]);rbtree_node *cur = rbtree_delete(T, node);free(cur);rbtree_traversal(T, T->root);printf("----------------------------------------\n");}
}