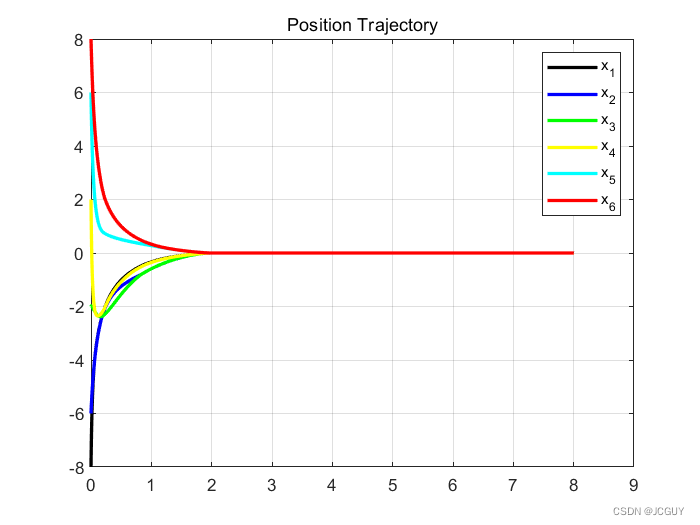
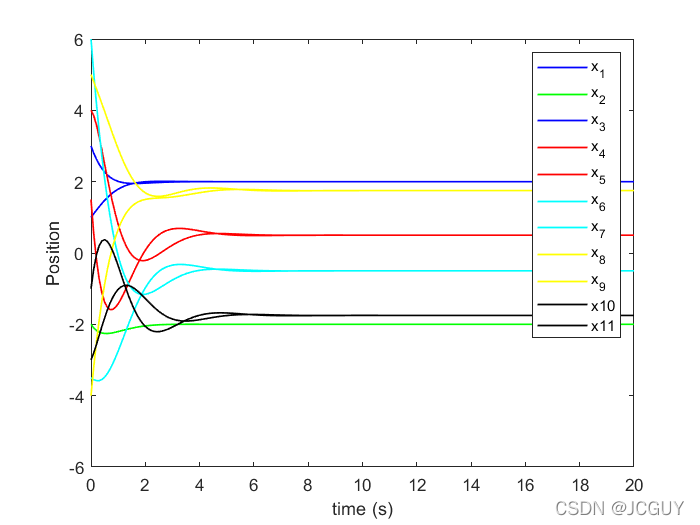
文章链接:Group-Bipartite Consensus in the Networks With Cooperative-Competitive Interactions
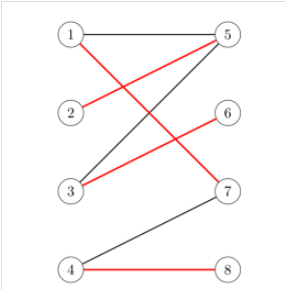
仿真图Fig3:
MATLAB代码
% Group-Bipartite Consensus in the Networks With Cooperative-Competitive Interactions
% Protocol Simulation Results
% author: JCGUY
% date: 2022-04-15
% 一阶 分组 二部 一致性clear;
clc;
%%
%状态初始值如下,十个智能体
X(:,1)= [ 1 -2 3 1.5 4 6 -3.5 -4 5 -1 -3]';
U(:,1) = [0,0,0,0,0,0,0,0,0,0,0]';
%a图的度矩阵D、邻接矩阵H、拉普拉斯矩阵H
A = [ 0 -1 0 0 0 0 0 0 0 0 0;0 0 -1 0 0 0 0 0 0 0 0;1 0 0 0 0 0 0 0 0 0 0;1 0 -1 0 0 -1 0 0 0 0 0;0 1 1 1 0 0 0 0 0 0 0;0 0 0 0 0 0 1 0 0 0 0;0 0 0 0 -1 0 0 0 0 0 0;1 1 0 0 0 0 0 0 1 0 0;0 0 0 0 0 0 0 0 0 0 -1;0 0 0 0 1 0 1 -1 0 0 0;0 0 0 0 0 0 0 0 0 1 0];L = [ 1 1 0 0 0 0 0 0 0 0 0;% 10 1 1 0 0 0 0 0 0 0 0;% 1-1 0 1 0 0 0 0 0 0 0 0;% 1-1 0 1 1 0 1 0 0 0 0 0;% 1+ -1 +1=10 -1 -1 -1 1 0 0 0 0 0 0;% -1+1+1 =10 0 0 0 0 1 -1 0 0 0 0;% 10 0 0 0 1 0 1 0 0 0 0;% 1-1 -1 0 0 0 0 0 1 -1 0 0;% 1+ -1 +1=10 0 0 0 0 0 0 0 1 0 1;% 10 0 0 0 -1 0 -1 1 0 1 0;% 1+ -1 +1=10 0 0 0 0 0 0 0 0 -1 1];% 1%设置收敛相关参数
tBegin = 0;
tEnd = 20;
dt = 0.1;
times = ( tEnd - tBegin )/dt;
time = 1;
t(1,1) = 0;
n = 10;
%定义图数据的存储数组% t(:,1) = tBegin; %定义能够记录时间的数组
%%
%开始相关的收敛计算
while (time <= times)%t(1, time) = tBegin + dt * time;%时间数组t(:,time+1) = t(:,time) + dt;U(:, time) =-L*X(:, time);X(:,time+1)= X(:,time)+U(:,time)*dt;time = time+1;
end%%
%绘图 t,Xt(1,:)subplot(1,1,1)
plot(t,X(1,:),'b','linewidth',1.0); hold on % x1
plot(t,X(2,:),'g','linewidth',1.0); hold on % x2
plot(t,X(3,:),'b','linewidth',1.0); hold on % x3
plot(t,X(4,:),'r','linewidth',1.0); hold on % x4
plot(t,X(5,:),'r','linewidth',1.0); hold on % x5
plot(t,X(6,:),'c','linewidth',1.0); hold on % x6
plot(t,X(7,:),'c','linewidth',1.0); hold on % x7
plot(t,X(8,:),'y','linewidth',1.0); hold on % x8
plot(t,X(9,:),'y','linewidth',1.0); hold on % x9
plot(t,X(10,:),'k','linewidth',1.0); hold on % x10
plot(t,X(11,:),'k','linewidth',1.0); hold on % x11
% title('Position Trajectory');
legend("x_1", "x_2", "x_3", "x_4", "x_5", "x_6", "x_7", "x_8", "x_9", "x10", "x11");
xlabel("time (s)");
ylabel("Position");
axis([0 20 -6 6]); % subplot(1,2,2)
% plot(t,U(1,1:55),'linewidth',1.0); hold on % x1
% plot(t,U(2,1:55),'linewidth',1.0); hold on % x2
% plot(t,U(3,1:55),'linewidth',1.0); hold on % x3
% plot(t,U(4,1:55),'linewidth',1.0); hold on % x4
% plot(t,U(5,1:55),'linewidth',1.0); hold on % x5
% title('Position Trajectory');
% legend("u_1", "u_2", "u_3", "u_4", "u_5");
% grid on; box on; 
![[VLDB 2022]Butterfly Counting on Uncertain Bipartite Graphs](https://img-blog.csdnimg.cn/img_convert/1b73ccd0e116142bc0cca4fe865cd11b.png)
![二分匹配大总结——Bipartite Graph Matchings[LnJJF]](https://img-blog.csdnimg.cn/f12f5708538c44c08101ac60cf3d8342.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBATG5KSkY=,size_20,color_FFFFFF,t_70,g_se,x_16)