
网络中的亮点:
1.超深的网络结构(超过1000层)
2.提出residual(残差)模块
3.使用Batch Normalization加速训练(丢弃dropout)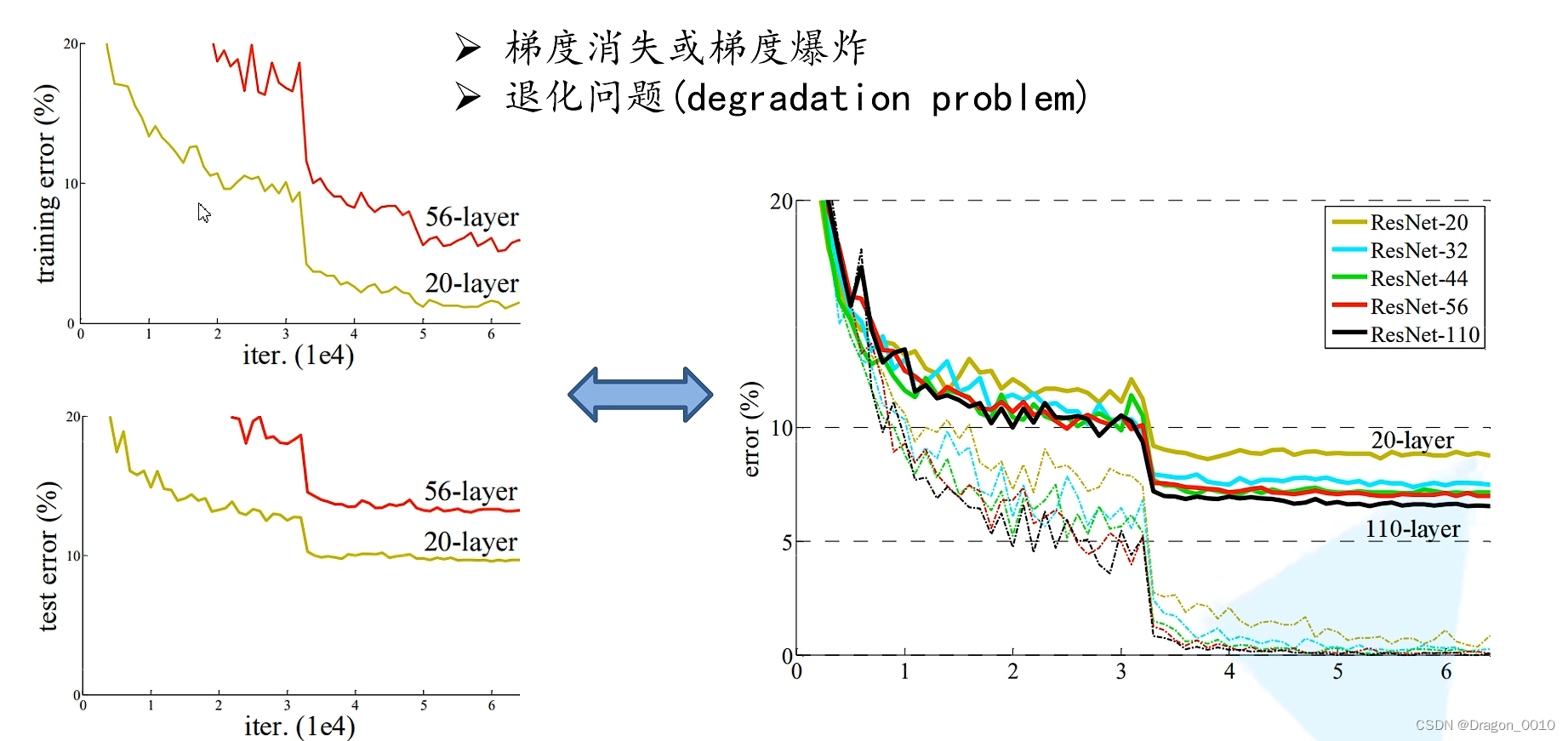
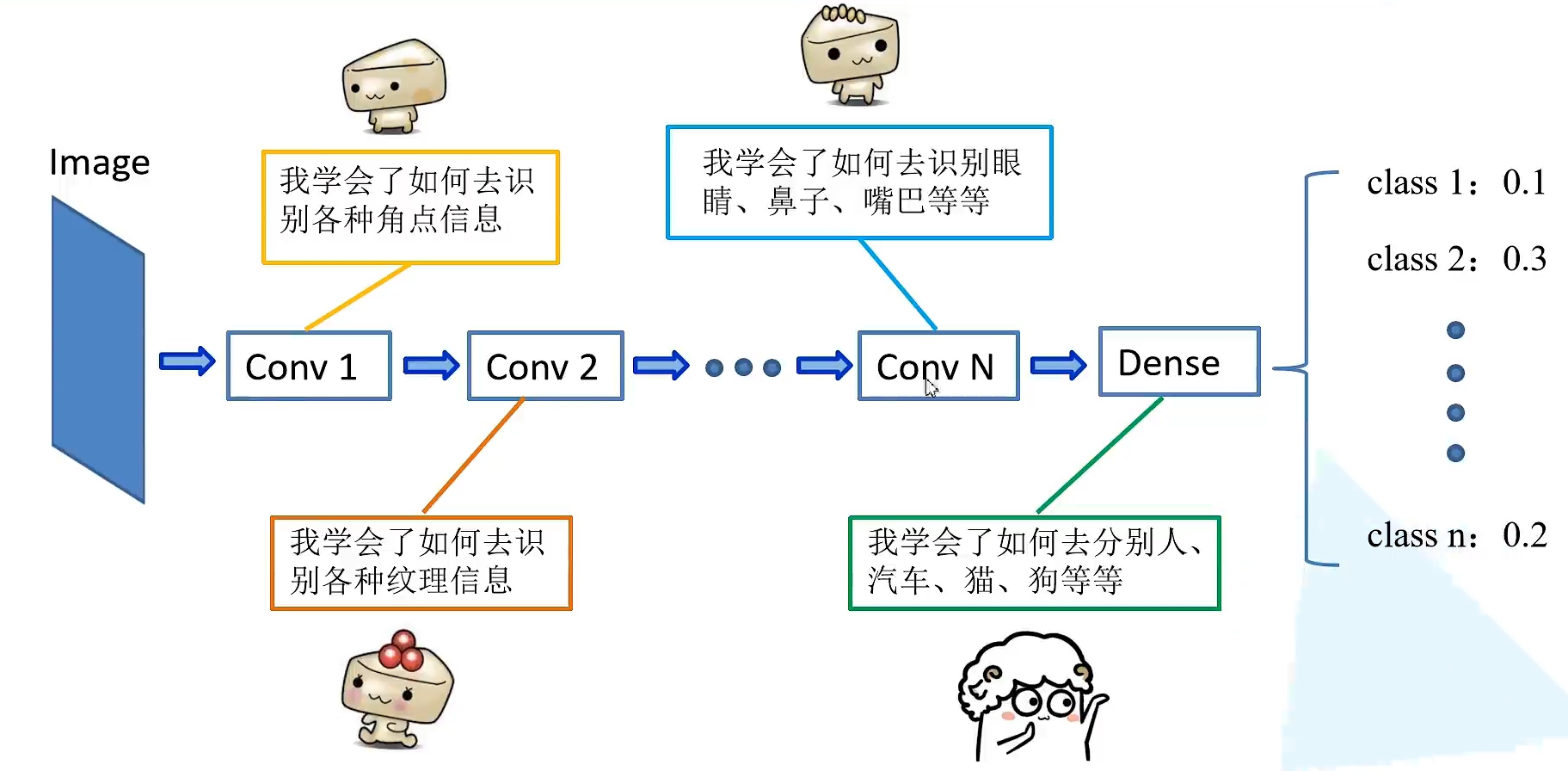
左边是将卷积层和池化层进行一个简单的堆叠所搭建的网络结构
20层的训练错误率大概在1%~2%左右
56层的训练错误率大概在7%~8%
所以通过简单的卷积层和池化层的堆叠,并不是层数越深训练效果越好
随着网络层数不断地加深,梯度消失和梯度爆炸这个现象会越来越明显:
假设我们每一层的误差梯度是一个小于1的数,那么在我们的反向传播过程中,
每向前传播一次,都要乘以一个小于1的系数,当我们网络越来越深的时候,结果就越趋近于0
这样梯度就会越来越小
假设误差梯度是一个大于1的数,最后会发生梯度爆炸
通常解决梯度消失和梯度爆炸问题的方法:
标准化处理,权重初始化,BN(Batch Normalization)
退化问题:
在我们解决了梯度消失和梯度爆炸问题后,我们仍然会存在层数深的效果不如层数浅的效果的问题
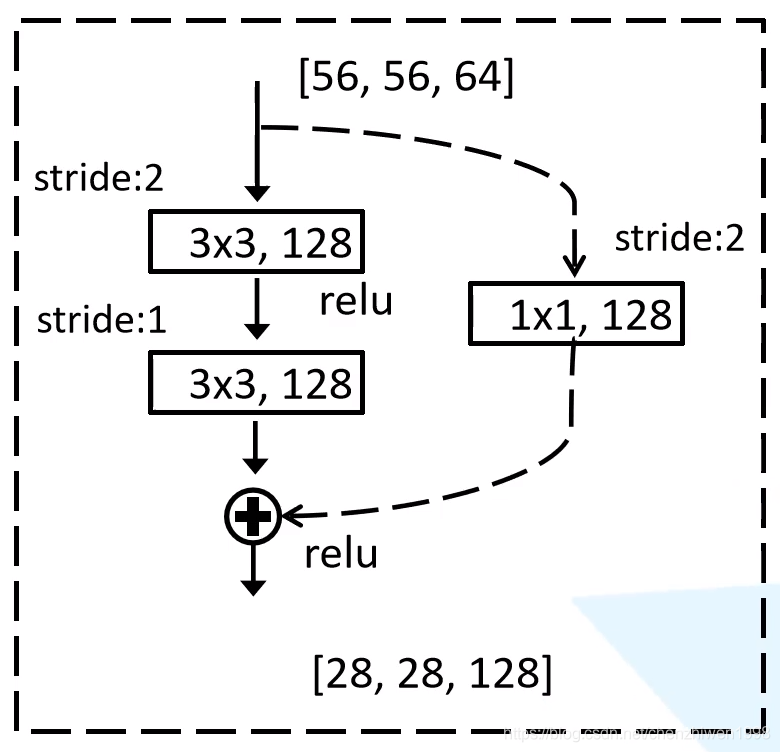
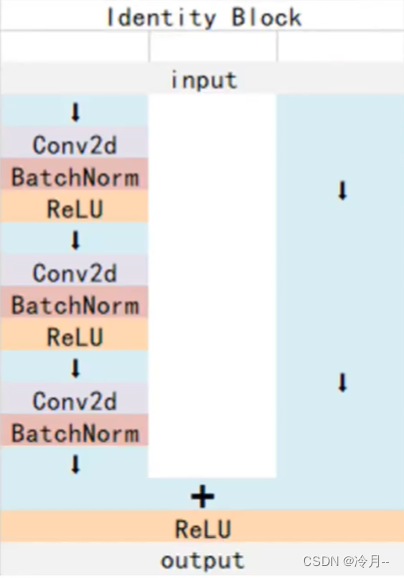
提出了残差结构:
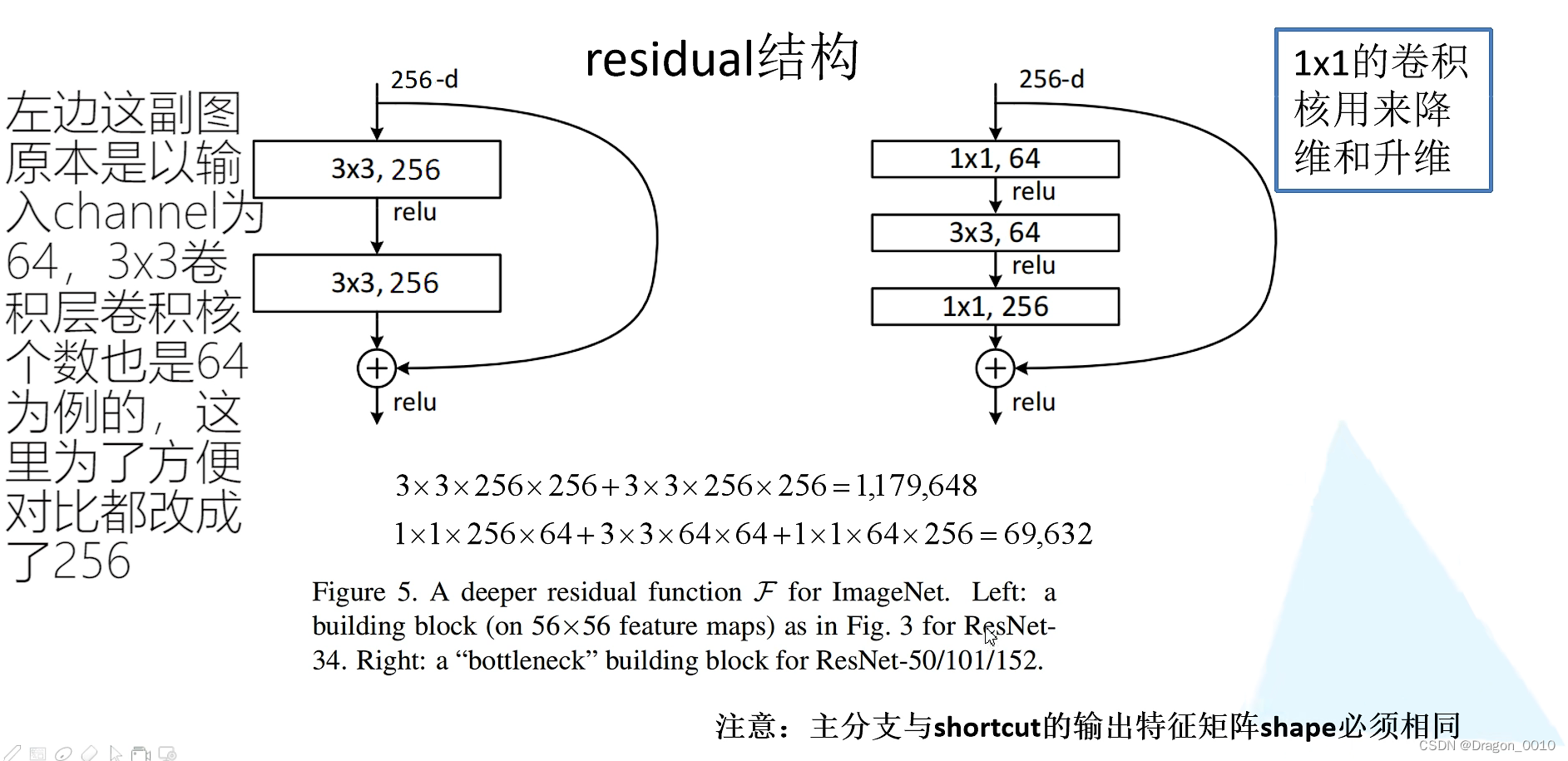
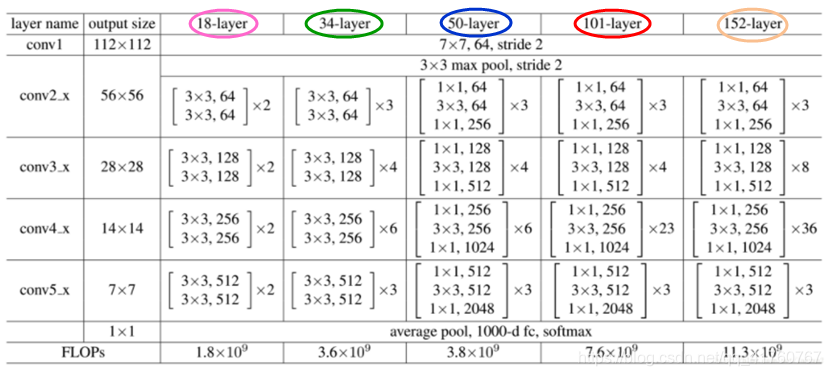
左边的残差结构主要是针对于网络层数较少的网络所使用的残差结构(ResNet-34)
主线是通过2个3*3的卷积层得到我们的一个结果,右边有一条弧线从输入连接到输出
将卷积之后的特征矩阵与我们输入的特征矩阵进行相加,相加之后再通过Relu激活函数
能相加就要求主分支和侧分支(shortcut)的输出特征矩阵shape必须相同(shape:高,宽,channel)
右边是针对网络层数较多的网络(50/101/152)
主线是先通过一个1*1的卷积层(降维),再通过一个3*3的卷积层,再通过一个1*1的卷积层(升维)
通过两个网络所需参数的对比可以发现,残差结构越多,所节省的参数越多

左边的实线部分,输入的特征矩阵与输出的特征矩阵shape相同,所以可以直接相加
右边虚线输入与输出shape不同
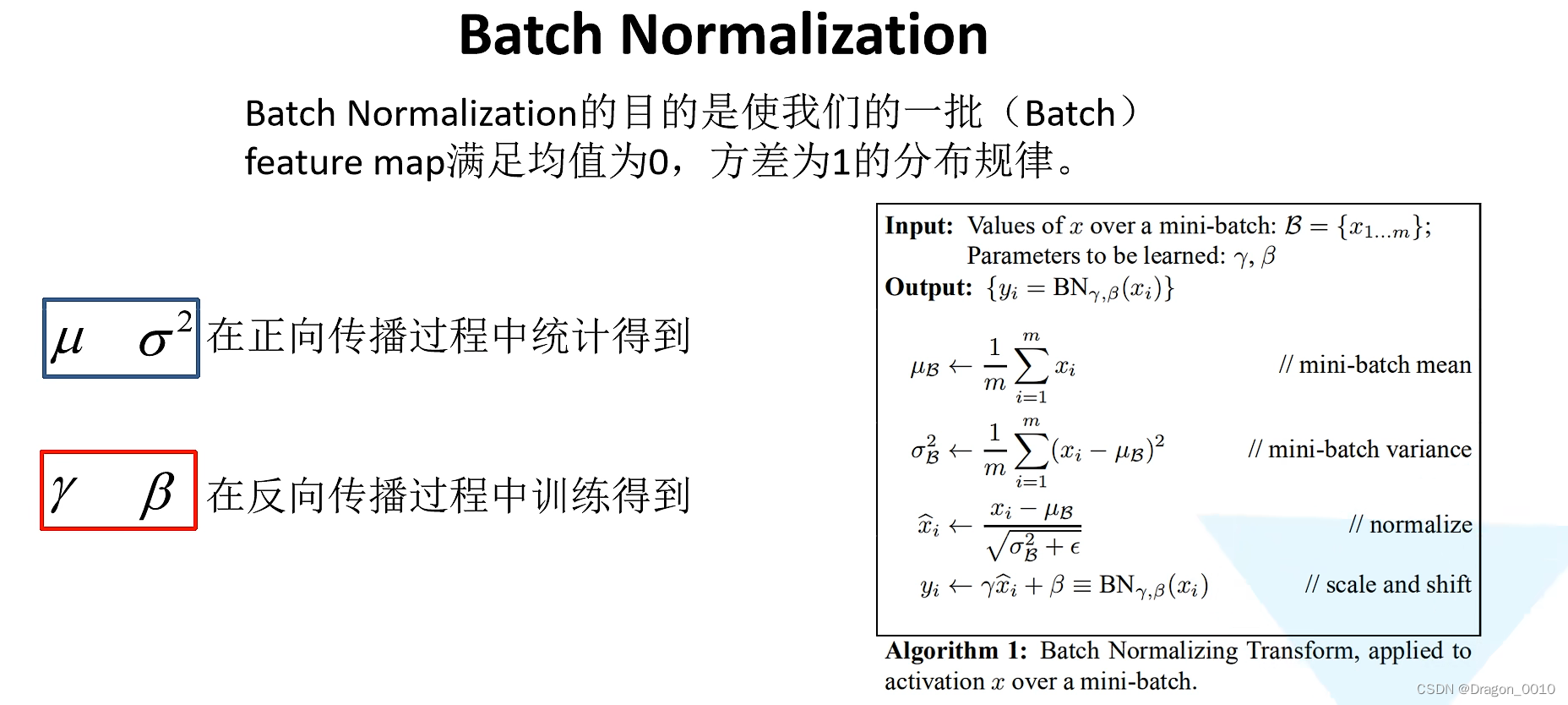
Batch Normalization
目的是使我们的一批(Batch)数据所对应的feature map(特征矩阵)每一个维度(channel)满足均值为0,方差为1的分布规律
通过该方法能够加速网络的收敛(训练)并提升准确率
对于一个拥有d维的输入x,我们将对它的每一个维度进行标准化处理
假设我们输入的x是RGB三通道的彩色图像,这里的d就是图像的channels,即d=3
使用BN时,在训练时将trainning参数设置为True,在验证时将trainning设置为False
将BN层放在卷积层和激活层的中间
迁移学习的简介
优势:
1.能够快速的训练出一个理想的结果(训练的epoch较少)
2.当数据集较少时也能训练出理想的结果
注意:使用别人的预训练模型参数时,注意别人的预处理方式

迁移学习就是将学习好的一些浅层网络的参数迁移到我们新的网络当中来
这样我们新的网络也有了识别底层通用特征的能力了
常见的迁移学习方式:
1.载入权重后训练所有参数
2.载入权重后只训练最后几层参数
3.载入权重后再原网络的基础上在添加一层全连接层,仅训练最后一个全连接层
ResNext

 组卷积
组卷积
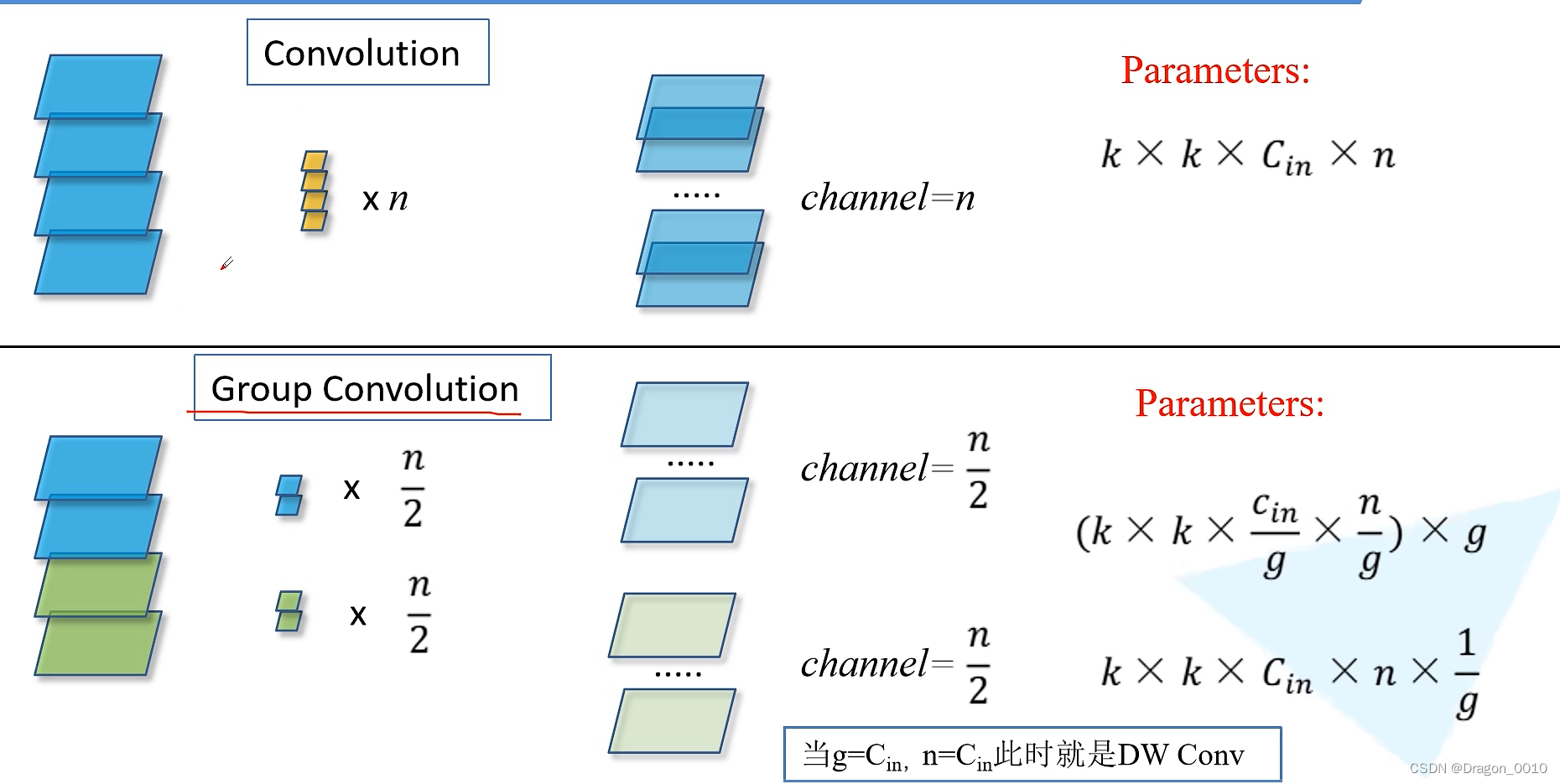
g是组数
代码实现
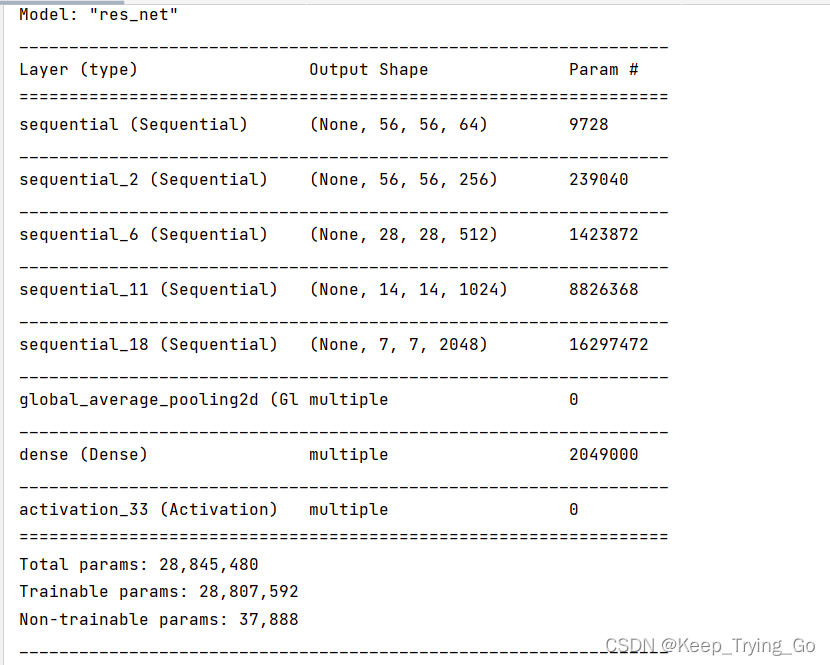
网络搭建
import torch.nn as nn
import torchclass BasicBlock(nn.Module):#对应的是18层和34层对应的残差结构expansion = 1#(扩张)对应的是残差层的卷积核个数有没有发生变化 18 34 layers都没有发生变化def __init__(self, in_channel, out_channel, stride=1, downsample=None, **kwargs):super(BasicBlock, self).__init__()self.conv1 = nn.Conv2d(in_channels=in_channel, out_channels=out_channel,kernel_size=3, stride=stride, padding=1, bias=False)self.bn1 = nn.BatchNorm2d(out_channel)self.relu = nn.ReLU()self.conv2 = nn.Conv2d(in_channels=out_channel, out_channels=out_channel,kernel_size=3, stride=1, padding=1, bias=False)self.bn2 = nn.BatchNorm2d(out_channel)self.downsample = downsampledef forward(self, x):identity = x#侧分支的输出值if self.downsample is not None:identity = self.downsample(x)out = self.conv1(x)out = self.bn1(out)out = self.relu(out)out = self.conv2(out)out = self.bn2(out)out += identityout = self.relu(out)return outclass Bottleneck(nn.Module):#50/101/152层的残差结构"""注意:原论文中,在虚线残差结构的主分支上,第一个1x1卷积层的步距是2,第二个3x3卷积层步距是1。但在pytorch官方实现过程中是第一个1x1卷积层的步距是1,第二个3x3卷积层步距是2,这么做的好处是能够在top1上提升大概0.5%的准确率。可参考Resnet v1.5 https://ngc.nvidia.com/catalog/model-scripts/nvidia:resnet_50_v1_5_for_pytorch"""expansion = 4#4对应的就是残差结构所使用的卷积核的变化def __init__(self, in_channel, out_channel, stride=1, downsample=None,groups=1, width_per_group=64):super(Bottleneck, self).__init__()width = int(out_channel * (width_per_group / 64.)) * groupsself.conv1 = nn.Conv2d(in_channels=in_channel, out_channels=width,kernel_size=1, stride=1, bias=False) # squeeze channelsself.bn1 = nn.BatchNorm2d(width)# -----------------------------------------self.conv2 = nn.Conv2d(in_channels=width, out_channels=width, groups=groups,kernel_size=3, stride=stride, bias=False, padding=1)self.bn2 = nn.BatchNorm2d(width)# -----------------------------------------self.conv3 = nn.Conv2d(in_channels=width, out_channels=out_channel*self.expansion,kernel_size=1, stride=1, bias=False) # unsqueeze channelsself.bn3 = nn.BatchNorm2d(out_channel*self.expansion)self.relu = nn.ReLU(inplace=True)self.downsample = downsampledef forward(self, x):identity = xif self.downsample is not None:identity = self.downsample(x)out = self.conv1(x)out = self.bn1(out)out = self.relu(out)out = self.conv2(out)out = self.bn2(out)out = self.relu(out)out = self.conv3(out)out = self.bn3(out)out += identityout = self.relu(out)return outclass ResNet(nn.Module):def __init__(self,block,blocks_num,num_classes=1000,include_top=True,groups=1,width_per_group=64):super(ResNet, self).__init__()self.include_top = include_topself.in_channel = 64self.groups = groupsself.width_per_group = width_per_groupself.conv1 = nn.Conv2d(3, self.in_channel, kernel_size=7, stride=2,padding=3, bias=False)self.bn1 = nn.BatchNorm2d(self.in_channel)self.relu = nn.ReLU(inplace=True)self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)self.layer1 = self._make_layer(block, 64, blocks_num[0])self.layer2 = self._make_layer(block, 128, blocks_num[1], stride=2)self.layer3 = self._make_layer(block, 256, blocks_num[2], stride=2)self.layer4 = self._make_layer(block, 512, blocks_num[3], stride=2)if self.include_top:self.avgpool = nn.AdaptiveAvgPool2d((1, 1)) # output size = (1, 1)self.fc = nn.Linear(512 * block.expansion, num_classes)for m in self.modules():if isinstance(m, nn.Conv2d):nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')def _make_layer(self, block, channel, block_num, stride=1):downsample = Noneif stride != 1 or self.in_channel != channel * block.expansion:downsample = nn.Sequential(nn.Conv2d(self.in_channel, channel * block.expansion, kernel_size=1, stride=stride, bias=False),nn.BatchNorm2d(channel * block.expansion))layers = []layers.append(block(self.in_channel,channel,downsample=downsample,stride=stride,groups=self.groups,width_per_group=self.width_per_group))self.in_channel = channel * block.expansionfor _ in range(1, block_num):layers.append(block(self.in_channel,channel,groups=self.groups,width_per_group=self.width_per_group))return nn.Sequential(*layers)def forward(self, x):x = self.conv1(x)x = self.bn1(x)x = self.relu(x)x = self.maxpool(x)x = self.layer1(x)x = self.layer2(x)x = self.layer3(x)x = self.layer4(x)if self.include_top:x = self.avgpool(x)x = torch.flatten(x, 1)x = self.fc(x)return xdef resnet34(num_classes=1000, include_top=True):# https://download.pytorch.org/models/resnet34-333f7ec4.pthreturn ResNet(BasicBlock, [3, 4, 6, 3], num_classes=num_classes, include_top=include_top)def resnet50(num_classes=1000, include_top=True):# https://download.pytorch.org/models/resnet50-19c8e357.pthreturn ResNet(Bottleneck, [3, 4, 6, 3], num_classes=num_classes, include_top=include_top)def resnet101(num_classes=1000, include_top=True):# https://download.pytorch.org/models/resnet101-5d3b4d8f.pthreturn ResNet(Bottleneck, [3, 4, 23, 3], num_classes=num_classes, include_top=include_top)def resnext50_32x4d(num_classes=1000, include_top=True):# https://download.pytorch.org/models/resnext50_32x4d-7cdf4587.pthgroups = 32width_per_group = 4return ResNet(Bottleneck, [3, 4, 6, 3],num_classes=num_classes,include_top=include_top,groups=groups,width_per_group=width_per_group)def resnext101_32x8d(num_classes=1000, include_top=True):# https://download.pytorch.org/models/resnext101_32x8d-8ba56ff5.pthgroups = 32width_per_group = 8return ResNet(Bottleneck, [3, 4, 23, 3],num_classes=num_classes,include_top=include_top,groups=groups,width_per_group=width_per_group)
训练模块
import os
import sys
import jsonimport torch
import torch.nn as nn
import torch.optim as optim
from torchvision import transforms, datasets
from tqdm import tqdmfrom model import resnet34def main():device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")print("using {} device.".format(device))data_transform = {"train": transforms.Compose([transforms.RandomResizedCrop(224),transforms.RandomHorizontalFlip(),transforms.ToTensor(),transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])]),"val": transforms.Compose([transforms.Resize(256),transforms.CenterCrop(224),transforms.ToTensor(),transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])}data_root = os.path.abspath(os.path.join(os.getcwd(), "../..")) # get data root pathimage_path = os.path.join(data_root, "data_set", "flower_data") # flower data set pathassert os.path.exists(image_path), "{} path does not exist.".format(image_path)train_dataset = datasets.ImageFolder(root=os.path.join(image_path, "train"),transform=data_transform["train"])train_num = len(train_dataset)# {'daisy':0, 'dandelion':1, 'roses':2, 'sunflower':3, 'tulips':4}flower_list = train_dataset.class_to_idxcla_dict = dict((val, key) for key, val in flower_list.items())# write dict into json filejson_str = json.dumps(cla_dict, indent=4)with open('class_indices.json', 'w') as json_file:json_file.write(json_str)batch_size = 16nw = min([os.cpu_count(), batch_size if batch_size > 1 else 0, 8]) # number of workersprint('Using {} dataloader workers every process'.format(nw))train_loader = torch.utils.data.DataLoader(train_dataset,batch_size=batch_size, shuffle=True,num_workers=0)validate_dataset = datasets.ImageFolder(root=os.path.join(image_path, "val"),transform=data_transform["val"])val_num = len(validate_dataset)validate_loader = torch.utils.data.DataLoader(validate_dataset,batch_size=batch_size, shuffle=False,num_workers=0)print("using {} images for training, {} images for validation.".format(train_num,val_num))net = resnet34()# load pretrain weights# download url: https://download.pytorch.org/models/resnet34-333f7ec4.pthmodel_weight_path = "./resnet34-pre.pth"#载入迁移学习模型参数assert os.path.exists(model_weight_path), "file {} does not exist.".format(model_weight_path)net.load_state_dict(torch.load(model_weight_path, map_location='cpu'))# for param in net.parameters():# param.requires_grad = False# change fc layer structurein_channel = net.fc.in_featuresnet.fc = nn.Linear(in_channel, 5)net.to(device)# define loss functionloss_function = nn.CrossEntropyLoss()# construct an optimizerparams = [p for p in net.parameters() if p.requires_grad]optimizer = optim.Adam(params, lr=0.0001)epochs = 3best_acc = 0.0save_path = './resNet34.pth'train_steps = len(train_loader)for epoch in range(epochs):# trainnet.train()running_loss = 0.0train_bar = tqdm(train_loader, file=sys.stdout)for step, data in enumerate(train_bar):images, labels = dataoptimizer.zero_grad()logits = net(images.to(device))loss = loss_function(logits, labels.to(device))loss.backward()optimizer.step()# print statisticsrunning_loss += loss.item()train_bar.desc = "train epoch[{}/{}] loss:{:.3f}".format(epoch + 1,epochs,loss)# validatenet.eval()acc = 0.0 # accumulate accurate number / epochwith torch.no_grad():val_bar = tqdm(validate_loader, file=sys.stdout)for val_data in val_bar:val_images, val_labels = val_dataoutputs = net(val_images.to(device))# loss = loss_function(outputs, test_labels)predict_y = torch.max(outputs, dim=1)[1]acc += torch.eq(predict_y, val_labels.to(device)).sum().item()val_bar.desc = "valid epoch[{}/{}]".format(epoch + 1,epochs)val_accurate = acc / val_numprint('[epoch %d] train_loss: %.3f val_accuracy: %.3f' %(epoch + 1, running_loss / train_steps, val_accurate))if val_accurate > best_acc:best_acc = val_accuratetorch.save(net.state_dict(), save_path)print('Finished Training')if __name__ == '__main__':main()
训练结果
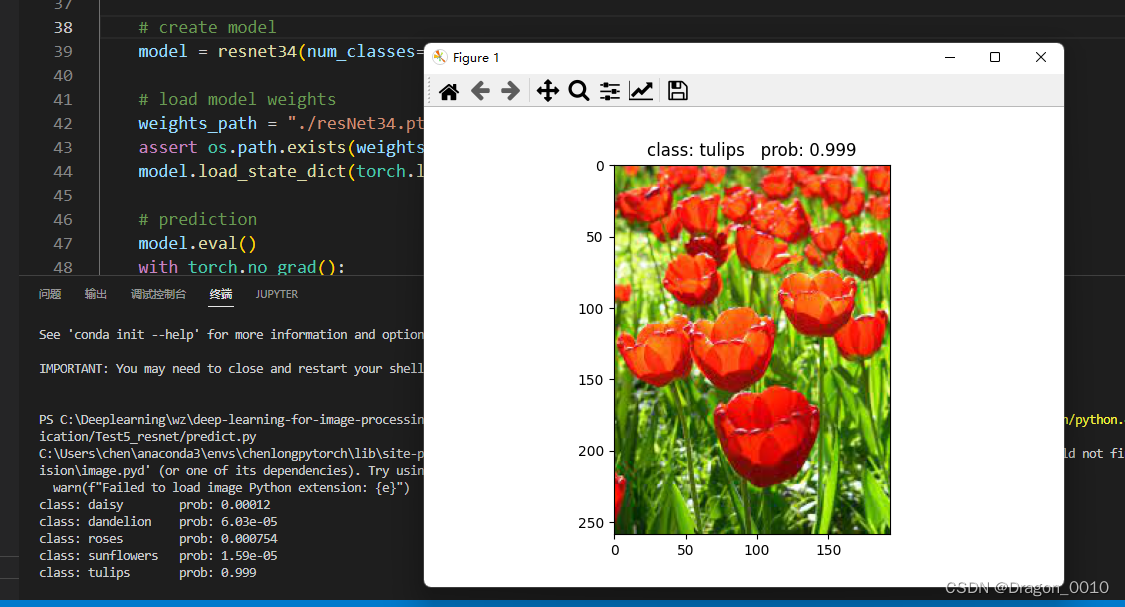
预测模块
import os
import jsonimport torch
from PIL import Image
from torchvision import transforms
import matplotlib.pyplot as pltfrom model import resnet34def main():device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")data_transform = transforms.Compose([transforms.Resize(256),transforms.CenterCrop(224),transforms.ToTensor(),transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])# load imageimg_path = "../tulip.jpg"assert os.path.exists(img_path), "file: '{}' dose not exist.".format(img_path)img = Image.open(img_path)plt.imshow(img)# [N, C, H, W]img = data_transform(img)# expand batch dimensionimg = torch.unsqueeze(img, dim=0)# read class_indictjson_path = './class_indices.json'assert os.path.exists(json_path), "file: '{}' dose not exist.".format(json_path)with open(json_path, "r") as f:class_indict = json.load(f)# create modelmodel = resnet34(num_classes=5).to(device)# load model weightsweights_path = "./resNet34.pth"assert os.path.exists(weights_path), "file: '{}' dose not exist.".format(weights_path)model.load_state_dict(torch.load(weights_path, map_location=device))# predictionmodel.eval()with torch.no_grad():# predict classoutput = torch.squeeze(model(img.to(device))).cpu()predict = torch.softmax(output, dim=0)predict_cla = torch.argmax(predict).numpy()print_res = "class: {} prob: {:.3}".format(class_indict[str(predict_cla)],predict[predict_cla].numpy())plt.title(print_res)for i in range(len(predict)):print("class: {:10} prob: {:.3}".format(class_indict[str(i)],predict[i].numpy()))plt.show()if __name__ == '__main__':main()











![[NCTF2019]SQLi 1regexp注入](https://img-blog.csdnimg.cn/4c262ff483944f478d13a83053002daf.png)
![buuctf-[NCTF2019]Keyboard](https://img-blog.csdnimg.cn/0d2cd646c0514b2198e62508d8e3c204.jpg)

![[NCTF2019]Fake XML cookbook](https://img-blog.csdnimg.cn/98fc6bd960dd496585955723c35c48fb.png)