一、通信接口介绍
1、处理器与外部设备通信的两种方式:
并行通信
- 传输原理:数据各个位同时传输。
-优点:速度快
-缺点:占用引脚资源多
串行通信
- 传输原理:数据按位顺序传输(一位一位传输)。
-优点:占用引脚资源少
-缺点:速度相对较慢
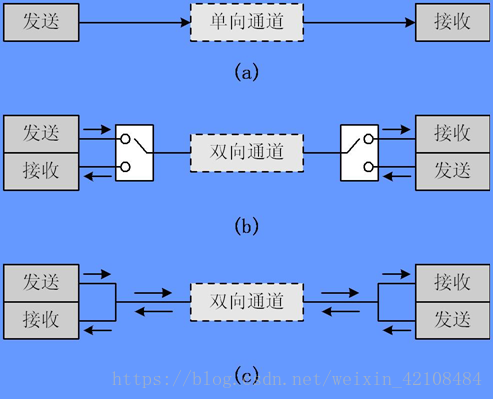
2、串行通信三种传送方式:
单工:
数据传输只支持数据在一个方向上传输
半双工:
允许数据在两个方向上传输,但是,在某一时刻,只允许数据在一个方向上传输,它实际上是一种切换方向的单工通信;
全双工:
允许数据同时在两个方向上传输,因此,全双工通信是两个单工通信方式的结合,它要求发送设备和接收设备都有独立的接收和发送能力。
3、串行通信的通信方式及举例
同步通信:带时钟同步信号传输。 -SPI,IIC通信接口
异步通信:不带时钟同步信号。 -UART(通用异步收发器),单总线

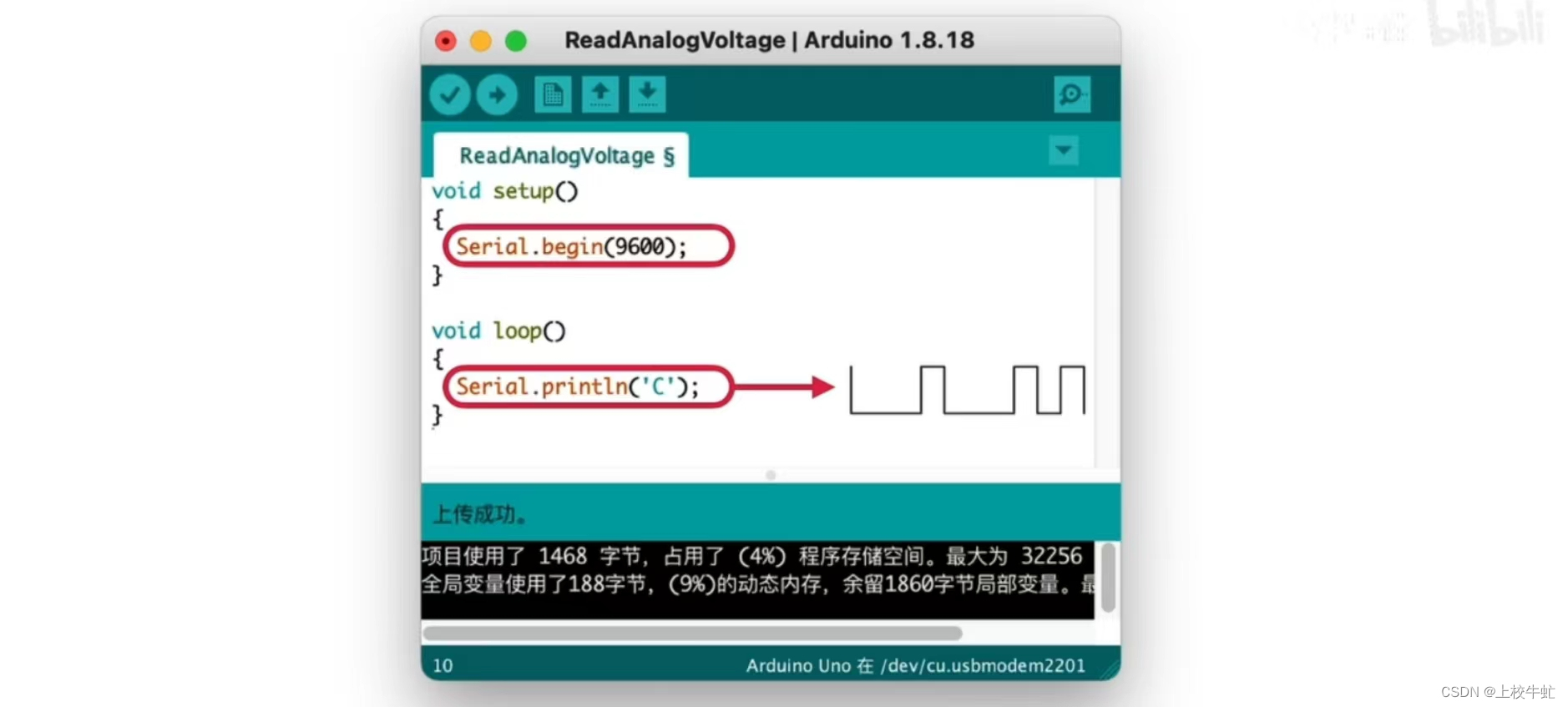
二、什么是串口:
串口是我们的大多数微控制单元(MCU)都具有的基本的外部接口,一般串口最基本的功能就是调试,又能做数据通信的接口(数据量要小一些)。
数据从A到B只能通过1根线,数据就像是羊肉块一样被串在线上
UART:通用异步收发器
USART:通用同步异步收发器
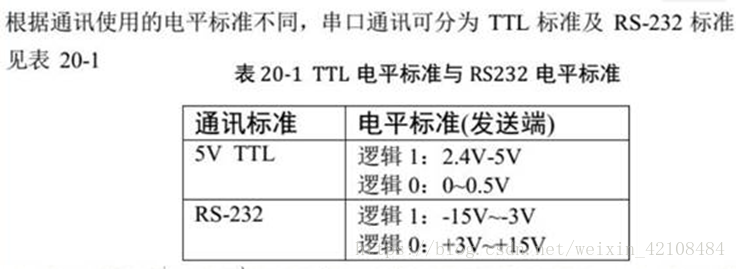
三、串口电平标准及引脚连接方法:
1、电平标准
TTL是常见的模块的通讯电平标准:串口wifi、串口蓝牙(4针接口:VCC、GND、TXD、RXD)
232一般是数据通讯接口:台式电脑的主机背后的九针接口
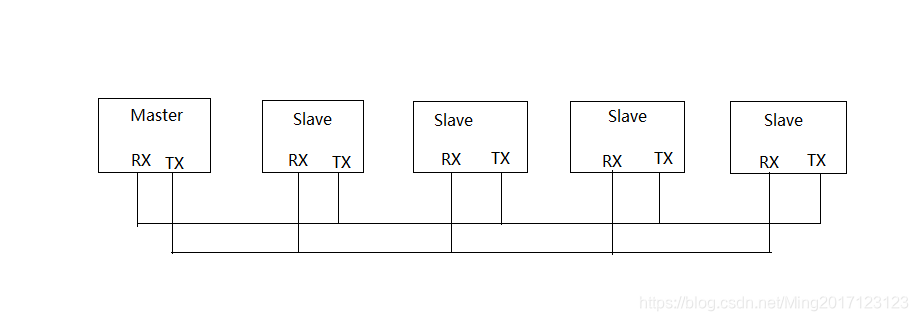
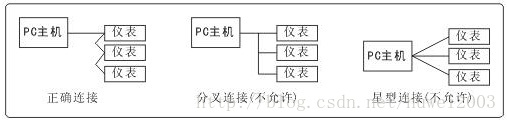
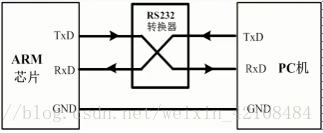
2、连接方法
RXD:数据输入引脚。数据接受。
TXD:数据发送引脚。数据发送。

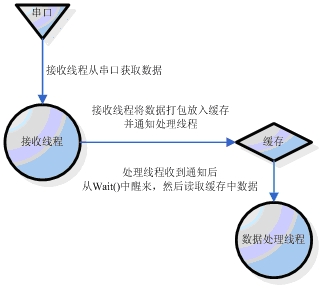
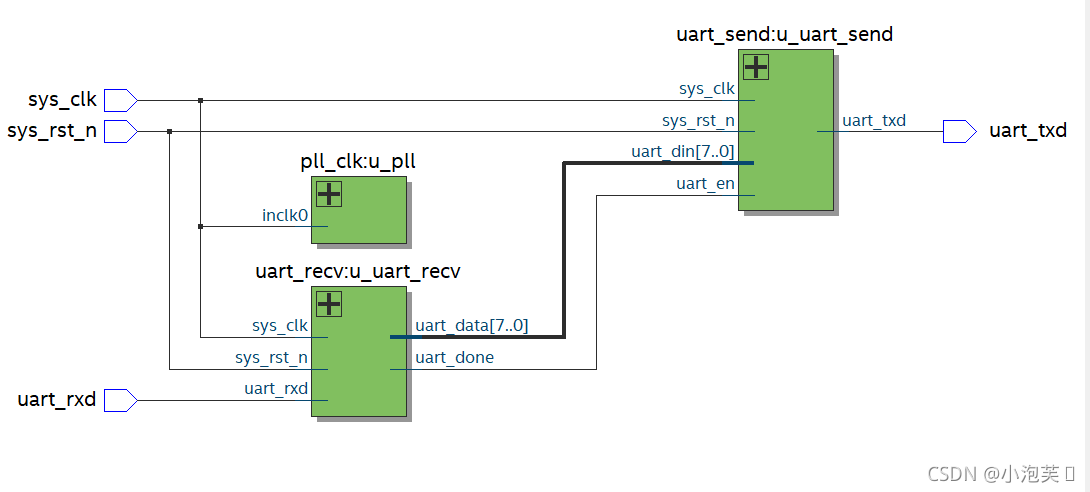
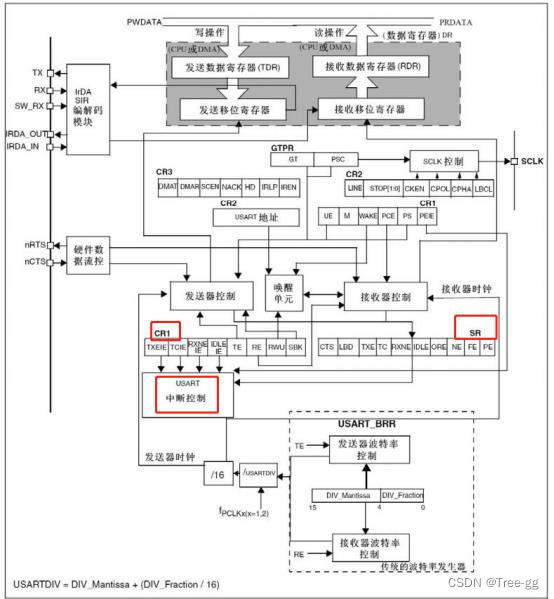
四、STM32串口通信过程
数据接收过程:

数据发送过程:

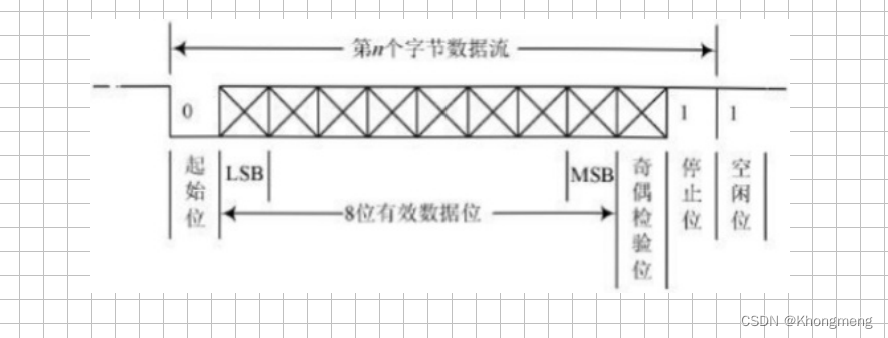
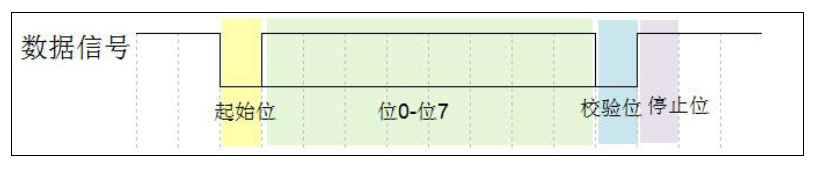
五、STM32串口异步通信需要定义的参数
①起始位
②数据位(8位或者9位) 9位是带奇偶校验位
③奇偶校验位(第9位)
奇检验就是保证8位数据位中1的个数为基数个,如果1是基数个则检验位就为0,反之为1;
偶检验就是保证8位数据位中1的个数为偶数个,如果1是偶数个则检验位就为0,反之为1;
④停止位(1,15,2位)
⑤波特率设置

六、UART配置过程
//1、串口时钟和GPIO时钟使能①串口时钟使能: RCC_APBxPeriphClockCmd();②GPIO时钟使能:RCC_AHB1PeriphClockCmd();//2、设置引脚复用器映射:GPIO_PinAFConfig();//3、串口参数初始化(GPIO配置)(五大参数)GPIO_Init();//初始化//4、串口参数初始化(六大参数)USART_Init(); //初始化串口//5.使能串口USART_Cmd();//6.开启中断(如果需要开启中断才需要这个步骤)// 设置中断进入的条件:接收数据缓冲区有数据的时候就会进入中断USART_ITConfig(USART1, USART_IT_RXNE,ENABLE);//7.配置NVIC中断(四大参数)NVIC_Init(&NVIC_InitStructure);//8、编写中断处理函数:USARTx_IRQHandler(); //串口数据收发:void USART_SendData();//发送数据到串口,DRuint16_t USART_ReceiveData();//接受数据,从DR读取接受到的数据//串口传输状态获取:FlagStatusUSART_GetFlagStatus();void USART_ClearITPendingBit();