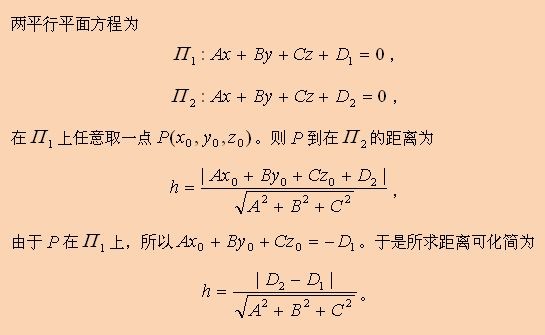
点到直线距离最小二乘解释
推倒部分
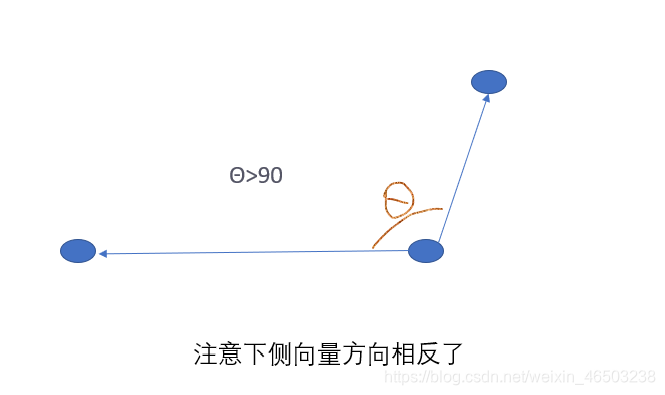
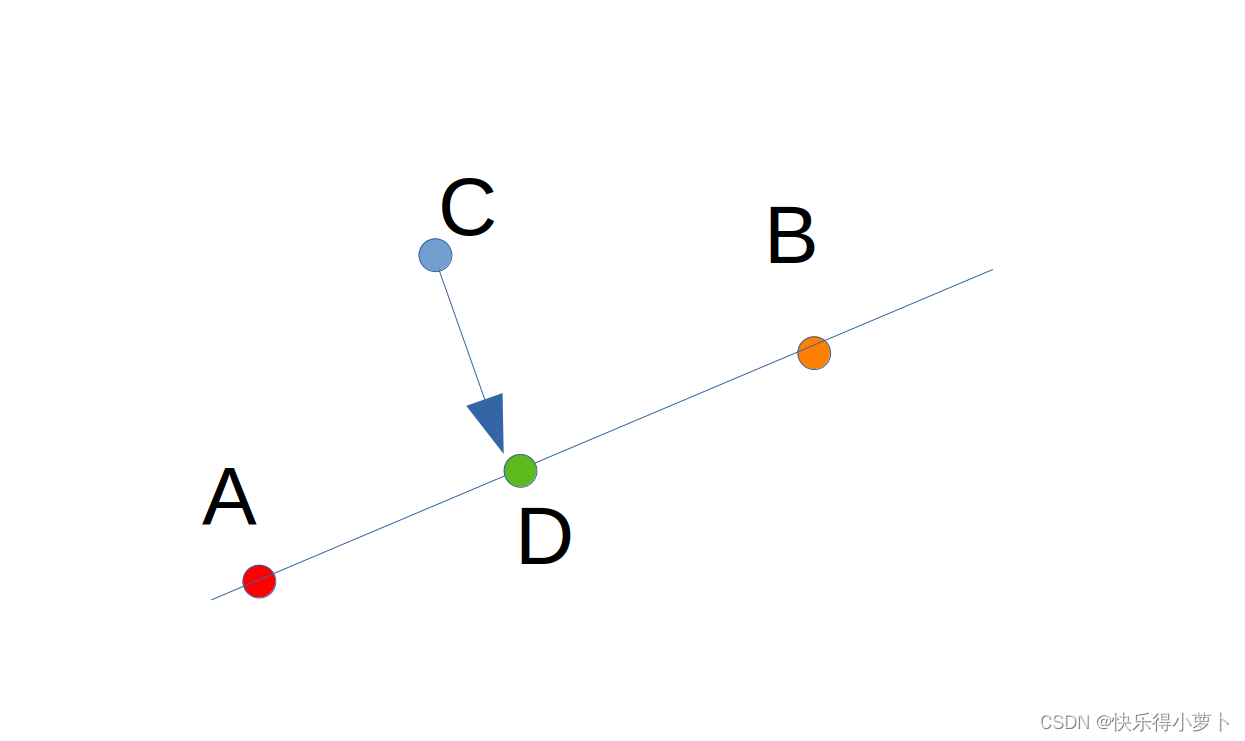
形象描述是C到AB距离最短,也就是CD最短用数学语言描述是 m i n ∣ ∣ ( B − A ) λ + A − C ∣ ∣ min||(B-A) \lambda + A - C || min∣∣(B−A)λ+A−C∣∣ 其中 D = ( B − A ) λ + A D = (B-A) \lambda + A D=(B−A)λ+A,其实本质是一个最小二乘问题。因此带入得到
λ = ( ( B − A ) T ( B − A ) ) − 1 ( B − A ) T ( C − A ) \lambda = ((B-A)^T(B-A))^{-1}(B-A)^T(C-A) λ=((B−A)T(B−A))−1(B−A)T(C−A)
因此带入得到 C D CD CD
D C = C − [ λ ( B − A ) + A ] DC = C - [\lambda (B-A)+A] DC=C−[λ(B−A)+A]
实现代码
#include "bits/stdc++.h"
#include "eigen3/Eigen/Core"// 求点到直线距离using namespace std;// 定义求解的模板类
// 目的求解C点到AB两点的距离template<typename point>
class solve
{
private:point mPA;point mPB;point mPC;
public:// 求解的部分point getMinVec(bool isNeedCheck = false){point subBA = mPB - mPA;double inv = 1./(subBA.transpose()*subBA);double temp = (subBA.transpose()*(mPC-mPA));double lambda = inv * temp;point res = mPC - subBA * lambda - mPA;// 验证 点积为0,是垂直的状态if(isNeedCheck){cout << "check " << (res.transpose() * subBA).transpose() << endl;}return res;}solve(point _A, point _B, point _C):mPA(_A), mPB(_B), mPC(_C){}~solve(){}
};int main(int argc, char ** argv){// 例子1 求解两个2维度的点构成的线 与另一个点的距离Eigen::Matrix<double,2,1> iA(1,1);Eigen::Matrix<double,2,1> iB(2,2);Eigen::Matrix<double,2,1> iC(0,1);solve<Eigen::Matrix<double,2,1>> cal(iA, iB, iC);Eigen::Vector2d res = cal.getMinVec();cout << "2 维度向量:" << res.transpose() << endl;cout << "2 模长:" << res.norm() << endl;// 例子2 3维度的Eigen::Matrix<double, 3, 1> iA3(1, 1, 1);Eigen::Matrix<double, 3, 1> iB3(2, 2, 2);Eigen::Matrix<double, 3, 1> iC3(0, 1, 0);solve<Eigen::Matrix<double,3,1>> cal3(iA3, iB3, iC3);Eigen::Vector3d res3 = cal3.getMinVec(true);cout << "3 维度向量:" << res3.transpose() << endl;cout << "3 模长:" << res3.norm() << endl;return 0;}