目录
Ubuntu20.04之ROS(noetic)安装教程
Ubuntu18.04之ROS(melodic)安装教程
ubuntu20.04之ROS(noetic)安装教程
1、软件源(作用是比官方快)
sudo sh -c '. /etc/lsb-release && echo "deb htt六p://m六irrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
2、密钥
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
3、更新软件源
sudo apt update
4、添加一个公钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
5、安装ROS(noetic)
sudo apt install ros-noetic-desktop-full
6、初始化rosdep
sudo rosdep init
7、错误:找不到rosdep命令
方法:sudo apt install python3-rosdep2
8、再初始化rosdep
报错:ERROR: cannot download default sources list from:
ht六tps://raw.git六hub六userc六ontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list Website may be down.
原因:网络不好连接github超时。
解决方法:
1、连手机热点(有时候也不好使)或者 能翻qiang的网(好使)
2、进入 sudo gedit /usr/lib/python3/dist-packages/rosdep2/sources_list.py 修改72行的DOWNLOAD_TIMEOUT = 15.0 改大点变成150。(网慢的时候可以改,但是如果你的网根本进不去github的网站,那这个数改到多大都不好使。)
3、(鱼香ROS的大佬写的 亲测好用!!)
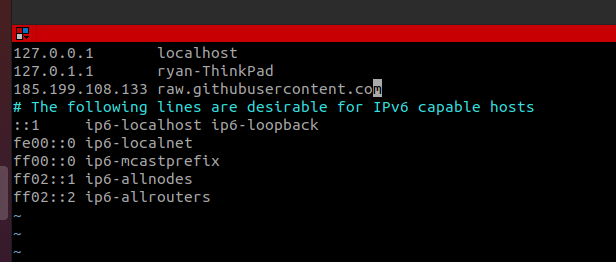
到 sudo gedit /etc/hosts,将199.232.28.133 raw.githubusercontent.com添加在文件中。
sudo apt-get install python3-pip
sudo pip install rosdepc再初始化一次
sudo rosdepc init再更新一次依赖
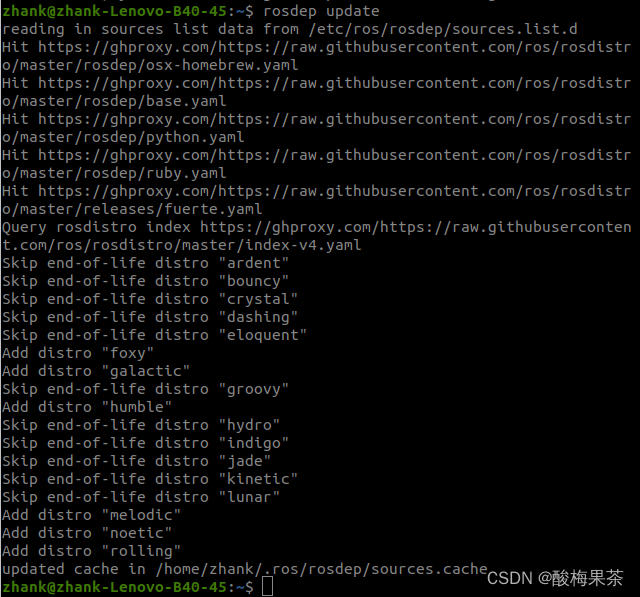
rosdepc update
如下是成功界面
自此就完成rosdep更新啦
9、设置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
更新一下修改后的脚本变量
source ~/.bashrc
10、安装rosinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool
11、验证ROS是否成功
安装roscore
sudo apt install python3-roslaunch
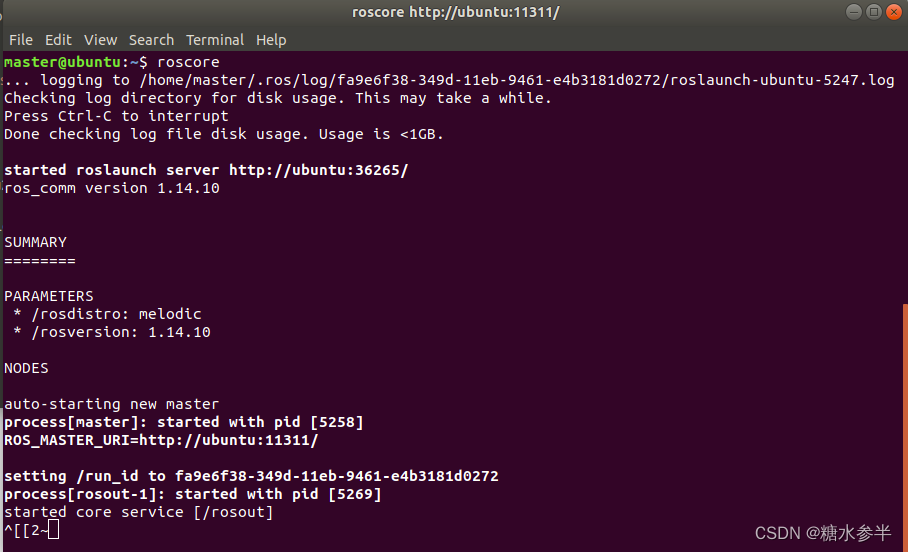
运行roscore
roscore小插曲:报错:Resource not found : roslaunch ...(说明ros安装不完整)
解决方法:重安装
sudo apt install ros-noetic-desktop-full
再运行roscore
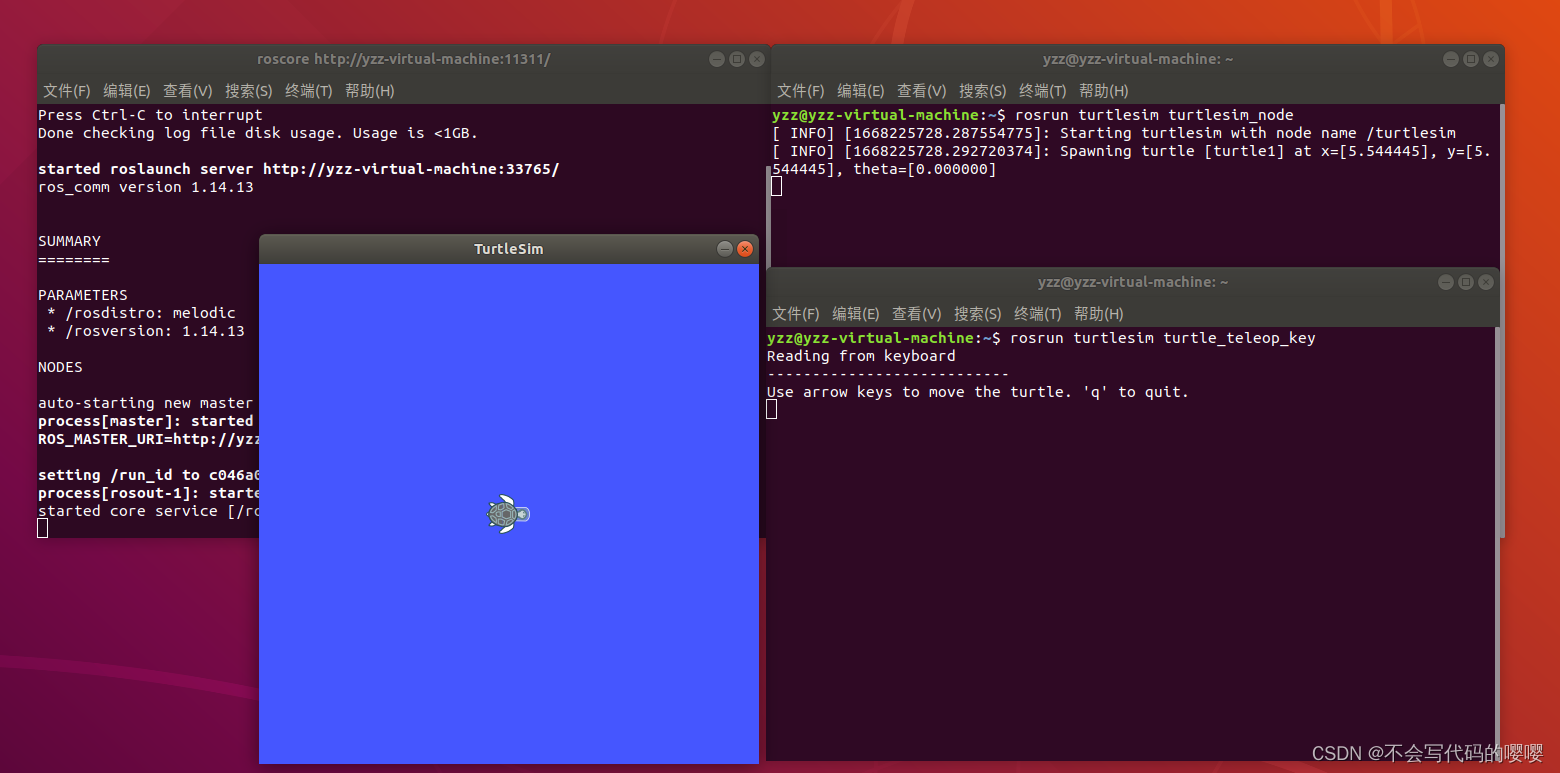
roscore12、ROS测试之小海龟
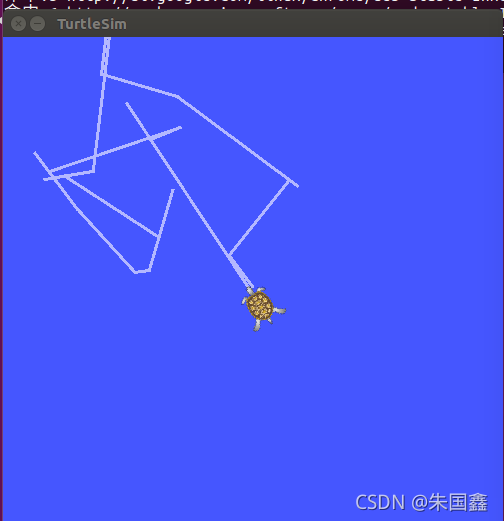
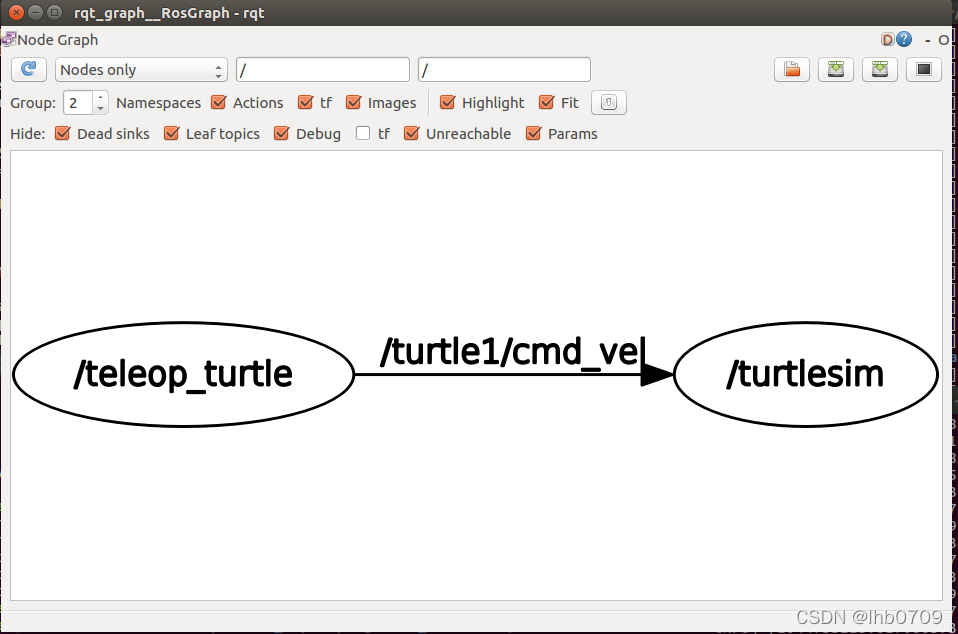
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
尝试用↑←↓→方向键操纵海龟,成了就代表ROS安装完毕!
Ubuntu18.04之ROS(melodic)安装教程
1、软件源(作用是比官方快)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
2、密钥
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
3、更新软件源
sudo apt update
4、添加一个公钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
5、安装ROS(melodic)
sudo apt install ros-melodic-desktop-full
安装ROS(kinetic)
sudo apt install ros-kinetic-desktop-full
6、初始化rosdep
sudo rosdep init
7、错误:找不到rosdep命令
方法:sudo apt install python3-rosdep2
8、再初始化rosdep
报错:ERROR: cannot download default sources list from:
ht六tps://raw.githubu六serco六ntent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
解决方法:同上
9、剩余步骤也同上