1.安装Ubuntu 14.04
2.安装ROS Indigo版本
安装可能以下出现的问题
错误信息:Unpacking ros-indigo-desktop-full (1.1.6-0trusty-20181006-135515-0800) ...
Errors were encountered while processing:/var/cache/apt/archives/python-rosdistro-modules_0.7.0-1_all.deb/var/cache/apt/archives/python-rosdistro_0.7.0-100_all.deb先卸载ROS再更新dpkg后再重新安装(建议先更新dpkg再进行安装)
sudo apt-get remove ros-indigo-desktop-full
sudo apt-get remove ros-*
sudo apt-get install dpkg3.下载 Apollo platform并解压
https://github.com/ApolloAuto/apollo-platform/releases
4.覆盖已安装的ROS目录
cp -rf indigo/ /opt/ros/5.安装 protobuf
pip install protobuf6. 更新 catkin_pkg
到https://pypi.org/project/catkin_pkg/#files下载
解压进入该目录执行编译安装的命令
python setup.py buildsudo python setup.py install7.测试
创建talker.cpp
#include "ros/ros.h"
#include "std_msgs/String.h"#include <sstream>int main(int argc, char **argv)
{ros::init(argc, argv, "talker");ros::NodeHandle n;ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);ros::Rate loop_rate(10);int count = 0;while (ros::ok()){std_msgs::String msg;std::stringstream ss;ss << "hello world " << count;msg.data = ss.str();ROS_INFO("%s", msg.data.c_str());chatter_pub.publish(msg);loop_rate.sleep();++count;}return 0;
}
创建listener.cpp
#include "ros/ros.h"
#include "std_msgs/String.h"void chatterCallback(const std_msgs::String::ConstPtr& msg)
{ROS_INFO("I heard: [%s]", msg->data.c_str());
}int main(int argc, char **argv)
{ros::init(argc, argv, "listener");ros::NodeHandle n;ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback);ros::spin();return 0;
}
cmake.txt添加可执行节点
include_directories(${catkin_INCLUDE_DIRS})
add_executable(talker talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})include_directories(${catkin_INCLUDE_DIRS})
add_executable(listener listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})在工作空间环境下进行的进行编译
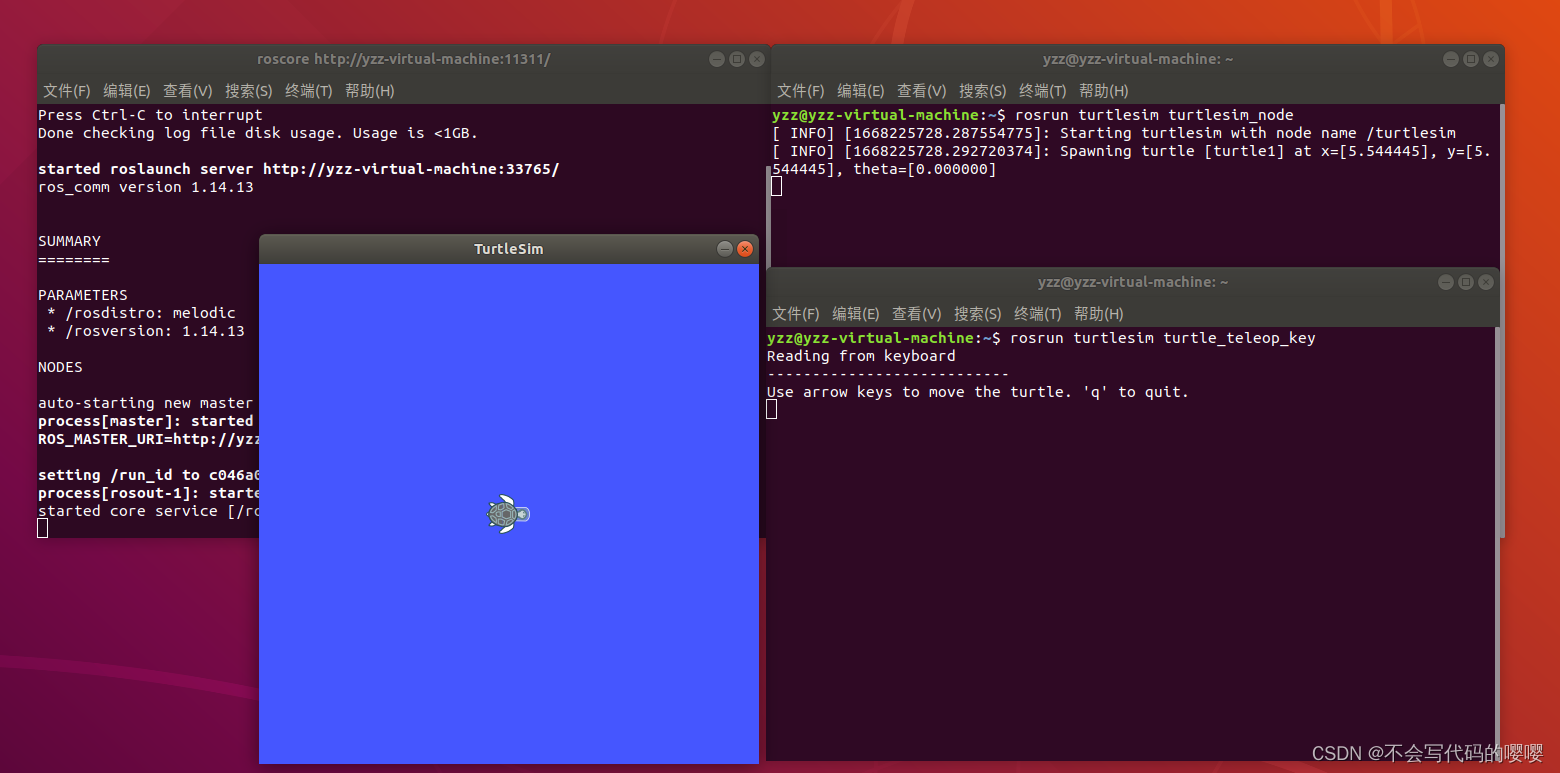
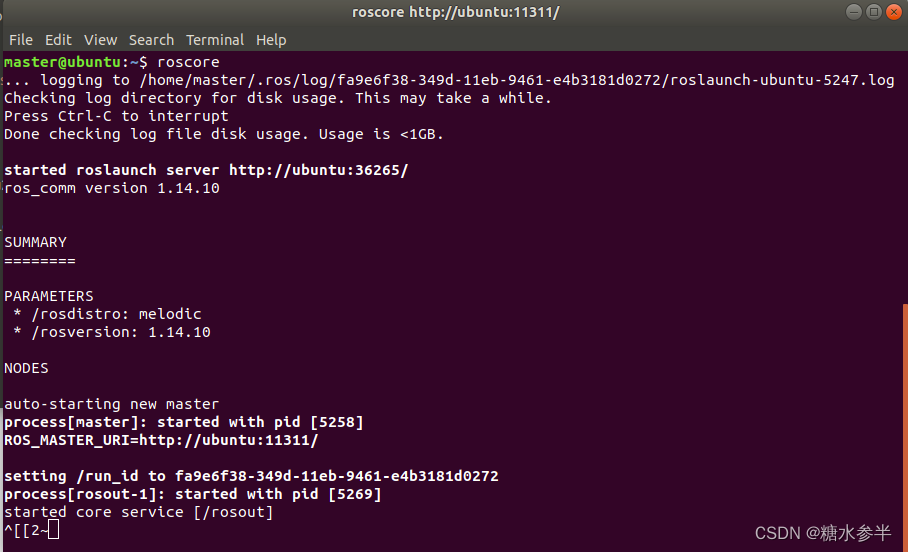
catkin_make在终端下运行
source /opt/ros/indigo/setup.bash
rosrun roscpp_tutorials talker 打开另一个终端
source /opt/ros/indigo/setup.bash
rosrun roscpp_tutorials listener
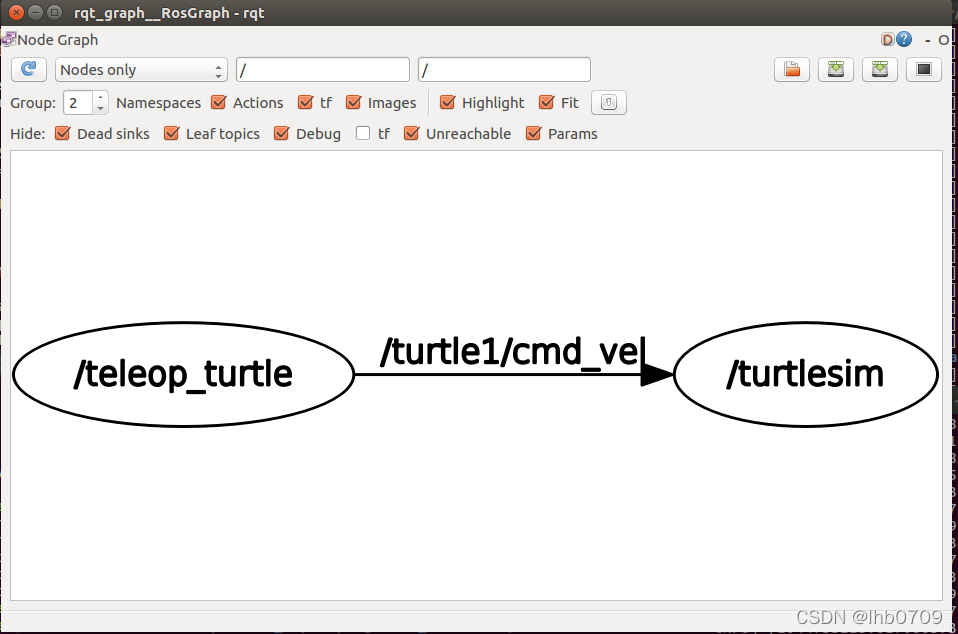
可以看到master节点并未启动,但talker和listener之间依然进行了通讯,因主节点没启动所以rqt_graph也未运行起来(想运行起来则需要roscore)。