Ubuntu 安装 ROS
- 一、修改为国内镜像源
- 二、ROS 官网安装介绍(kinetic-16.04、melodic-18.04、noetic-20.04)
- 三、ROS 安装步骤
- 1.添加 ROS 软件源到 sources.list
- 2.导入密钥
- 3.更新
- 4.安装 ROS 完整版
- 5.初始化rosdep
- 第一步
- 第二步
- 6.配置环境变量
- 7.安装 rosinstall 依赖项
- 四、测试
- 打开三个终端分别运行以下三条指令
- 1.启动ROS Master
- 2.启动小海龟仿真器
- 3.启动海龟控制节点
一、修改为国内镜像源
在安装ROS时,修改为国内镜像源可以提高安装速度,避免出现无法定位软件包以及安装不成功的问题。
修改为国内镜像源的方法:点击此处跳转
二、ROS 官网安装介绍(kinetic-16.04、melodic-18.04、noetic-20.04)
网址:点击此处跳转
三、ROS 安装步骤
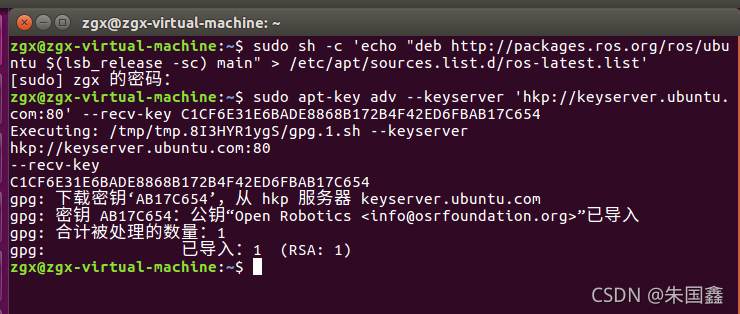
1.添加 ROS 软件源到 sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.导入密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3.更新
sudo apt-get update

4.安装 ROS 完整版
此指令代表安装桌面完整版本,包括:ROS,rqt, rviz,机器人通用库,2D/3D 仿真器,导航及 2D/3D 感知。
Ubuntu16.04 对应的 kinetic 版本
sudo apt-get install ros-kinetic-desktop-full
Ubuntu18.04 对应的 melodic 版本
sudo apt-get install ros-melodic-desktop-full
Ubuntu20.04 对应的 noetic 版本
sudo apt-get install ros-noetic-desktop-full
如下图情况,按 y 或者 Enter回车 继续

安装完成
5.初始化rosdep
第一步
sudo rosdep init
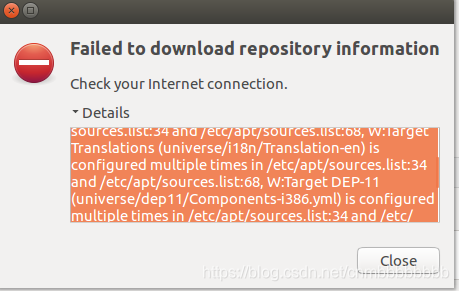
成功后长这个样子

可能会出现如下报错,点击此处跳转解决

第二步
rosdep update
6.配置环境变量
Ubuntu16.04 对应的 kinetic 版本
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
Ubuntu18.04 对应的 melodic 版本
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
Ubuntu20.04 对应的 noetic 版本
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
然后执行:
source ~/.bashrc
7.安装 rosinstall 依赖项
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
安装完成!!!
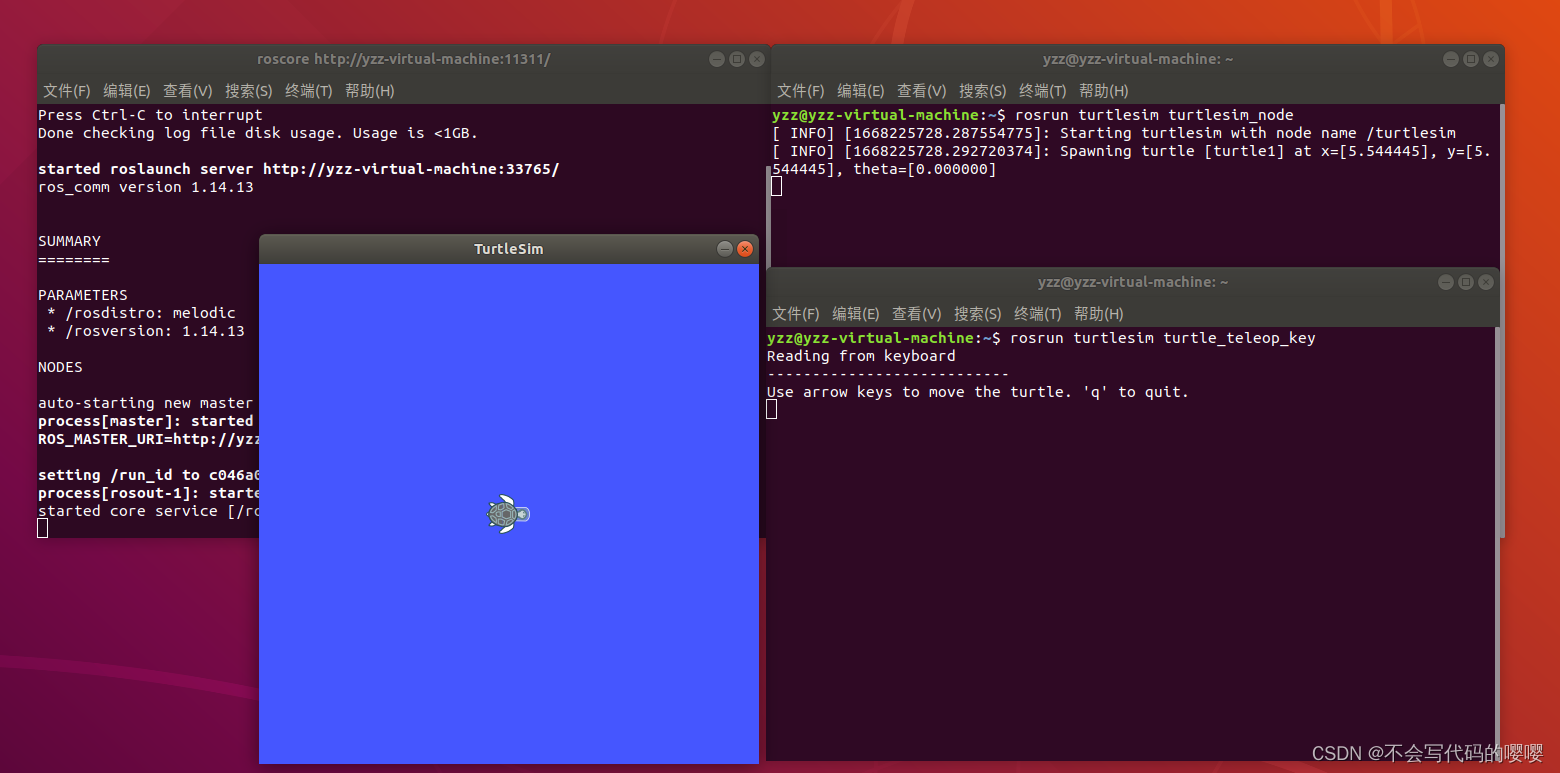
四、测试
打开三个终端分别运行以下三条指令
1.启动ROS Master
roscore
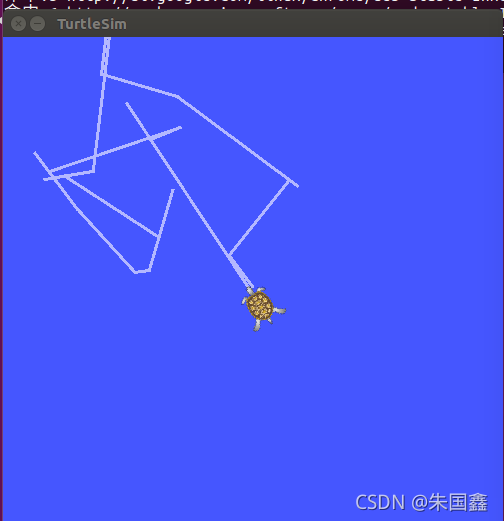
2.启动小海龟仿真器
rosrun turtlesim turtlesim_node

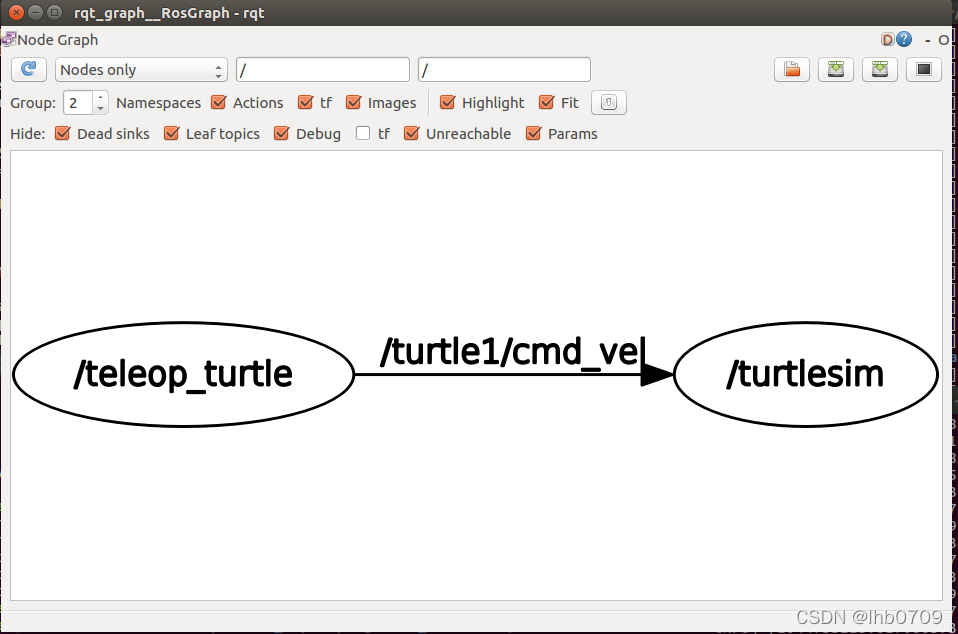
3.启动海龟控制节点
rosrun turtlesim turtle_teleop_key