肯定有许多人在安装ros的过程中遇到过各种各样的问题,接下来我将对ros安装进行详细的描述
1、下载操作系统
首先是版本的对应问题,ros安装一定要对应相应的操作系统版本,这里我们要安装的是Ros-Melodic-Morenia版本,对应的是Ubuntu的18.04版本
Ubuntu18.04下载地址:https://releases.ubuntu.com/18.04.6/
2、操作系统配置
下载完ubuntu的iso镜像之后,将镜像导入到vm虚拟机中,并且安装ubuntu
1. 换源
打开软件和更新,然后在ubuntu软件栏将下载自的地址改为国内源,我这里选择的是科大源,选完之后点击关闭然后点击重新载入即可
如果你的虚拟机没有网络的话尤其是对于使用校园网的同学来说,可以在开启虚拟机之前选择vm的编辑然后打开虚拟网络编辑器,点击更改设置然后还原默认设置

2. 调整窗口大小
注意: 不要使用网上说的通过解压安装官网vmtools的方法,之前因为这个问题一直没法解决复制粘贴的问题
这里我们要安装的是open-vm-tools
打开终端,逐个输入如下指令
sudo apt-get autoremove open-vm-tools
sudo apt-get install open-vm-tools
sudo apt-get install open-vm-tools-desktop
然后关闭虚拟机,在 vmware菜单栏-虚拟机-设置-选项-右侧下“增强型键盘”选为“在可用时使用”。重新开启虚拟机,这时候主虚之间复制粘贴的问题就解决了
3、安装ros
1. 设置源列表
在这里我们需要根据你选择的国内源来选择相应的指令
https://wiki.ros.org/ROS/Installation/UbuntuMirrors
科大的指令如下:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
2. 密钥设置
这里随便网上找个就行了
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3. 安装ros
sudo apt-get update
sudo apt-get install ros-melodic-desktop-full
4. 初始化rosdepc
sudo apt-get install python-pip3
sudo pip3 install rosdepcsudo rosdepc init
rosdepc update
5. 设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6. 安装生成包依赖
sudo apt-get install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
此时ros就已经安装完成了
4、测试
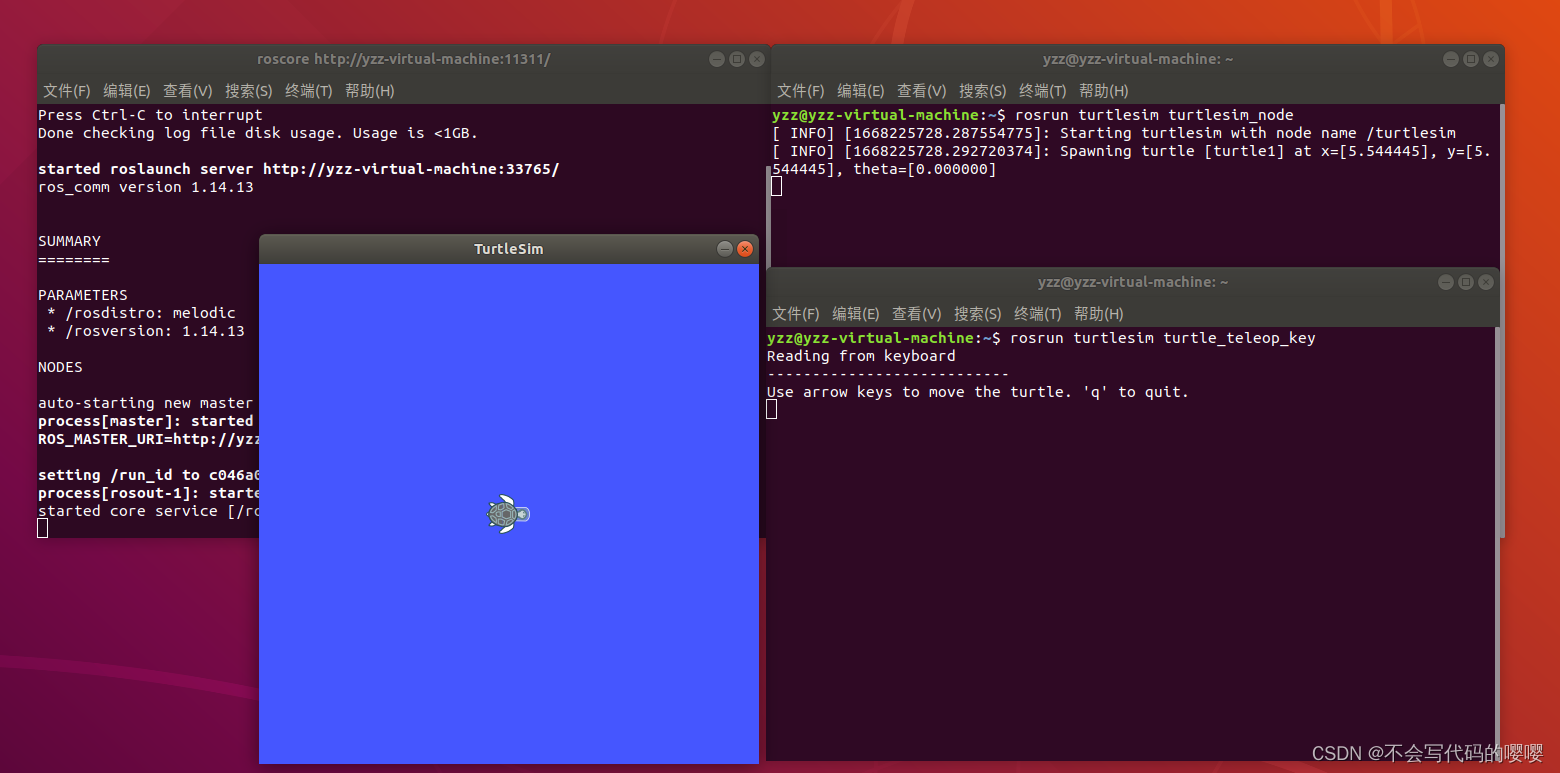
安装完成后,接下我们进行一个简单的测试来看看ros是否成功安装
打开三个终端,依次运行一下指令
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
最后是测试结果