@ROS(安装ROS)
1.2 安装 ROS
本小节介绍ROS的安装过程,参考链接:http://wiki.ros.org/cn/melodic/Installation
1.2.1 安装环境
ROS对于 Ubuntu 系统的支持比较好,所以本次我们的版本选择是 Ubuntu18.04 环境下安装 ROS Melodic Morenia 发行版,关于 Ubuntu18.04 的系统安装和简易教程参考学习平台上的《Ubuntu Linux操作系统》系列教程(http://www.iflyros.com/)。
1.2.2 配置 Ubuntu 软件源
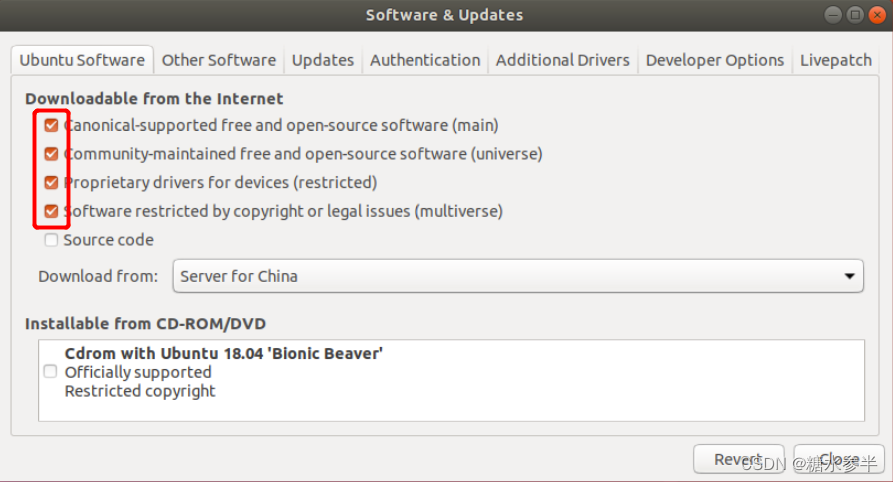
Ubuntu 系统 和 Windows 系统以及 Android 系统一样有自己的软件库,软件库中有成千上万的程序来满足 Ubuntu 用户的需求。这些软件在 Ubuntu 系统中被分成了这样几类: main 是规范支持的免费且开源的软件;Universe 是由社区维护的免费且开源的软件;Restricted 是设备的专用驱动程序;Multiverse 是受版权或法律问题限制的软件。这里我们需要确保这几类软件源都已被勾选。
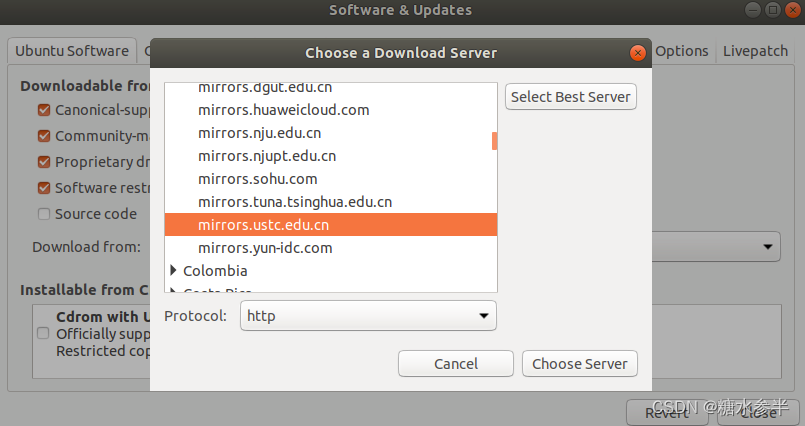
具体设置步骤如下:打开设置 -> Software&Update
 勾选main、universe、restricted、multiverse
勾选main、universe、restricted、multiverse
Ubuntu 有很多镜像源,可以在 Download from 的下拉菜单中选择一个国内镜像源,国内源下载速度要相对快很多。这里我们选择中国科学技术大学(USTC)的镜像源
 1.2.3 添加 ROS 软件源
1.2.3 添加 ROS 软件源
这里我们先介绍一下 sources.list 这个文件,它的存放目录是 /etc/apt/sources.list,是一个普通可编辑的文本文件,保存了ubuntu软件更新的源服务器的地址。和 sources.list 功能一样的是 /etc/apt/sources.list.d/.list ( 代表一个文件名,只能由字母、数字、下划线、英文句号组成)。sources.list.d 目录下的 *.list 文件为在单独文件中写入源的地址提供了一种方式,通常用来安装第三方的软件。这里我们需要把 ROS 的软件源地址添加到该文件夹中以确保安装的时候能找到准确的软件地址。
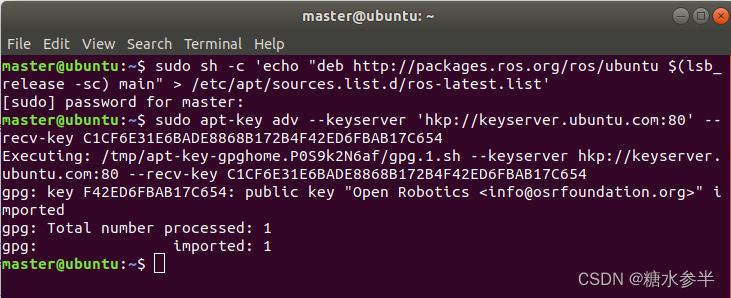
首先打开一个终端(ctrl+alt+T),然后在终端中敲入如下指令后回车
sudo sh -c ‘echo “deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
结果如下图所示,首次打开的终端操作这一步的时候会提示输入密码以获得相应权限

1.2.4 添加密钥
在终端中输入如下指令
sudo apt-key adv --keyserver ‘hkp://keyserver.ubuntu.com:80’ --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
1.2.5 正式安装
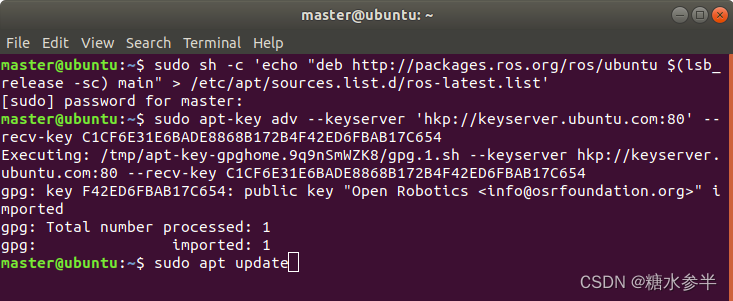
首先确认你的Debian包索引是最新的,在终端输入如下指令:
sudo apt update
前面我们有提到 ROS 给我们提供了很多不同的库和工具,但是并不是所有的库和工具我们都一定会用的上。就像 office 办公软件一样,我们可以选择所有软件一起安装,也可以在安装导引中选择只安装 Word 或者 Excel,ROS 的安装亦是如此,官方给我们提供了4个选项:
桌面完整版安装(推荐) :这种安装方式几乎包含了 ROS、rqt、rviz、机器人通用库、2D/3D模拟器、导航以及2D/3D感知包。
sudo apt install ros-melodic-desktop-full
桌面版:包含 ROS,rqt,rviz和机器人通用库。
sudo apt install ros-melodic-desktop
ROS基础包:仅包含了 ROS 包,没有图形化工具,比较适合安装在一些算力资源比较紧张的嵌入式设备。
sudo apt install ros-melodic-ros-base
单独的包:也可以安装某个指定的 ROS 软件包(使用软件包的名称替换掉下面的 PACKAGE)
sudo apt install ros-melodic-PACKAGE
如安装 gmapping 这个 SLAM 算法包:
sudo apt install ros-melodic-slam-gmapping
如果想要查询可用的软件包,在终端输入如下指令:
apt search ros-melodic
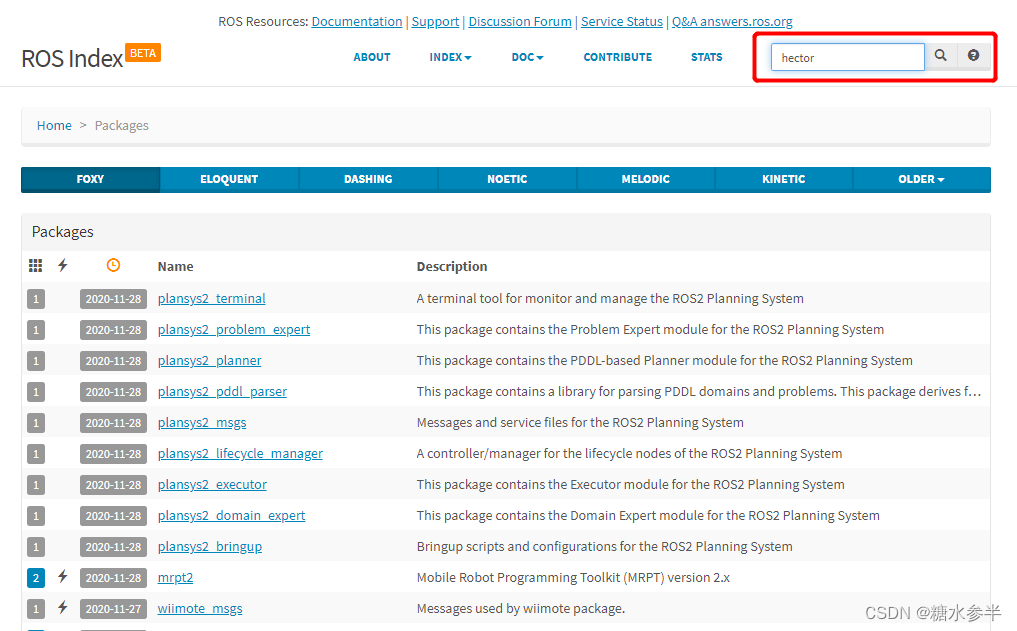
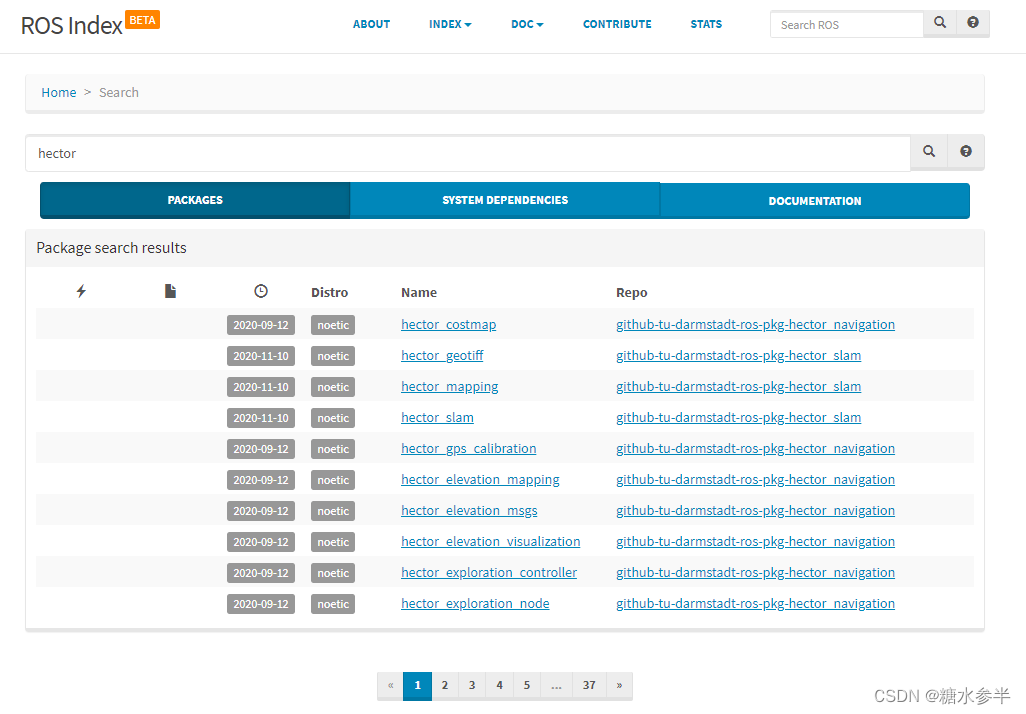
还有一种查询软件包的方式是在 ROS 官网的软件包索引页面中查询(https://index.ros.org/packages/),如下所示,我们来尝试查询一下 hector 算法相关的软件包:
这里我们出于教学角度考虑选择安装桌面完整版,在终端输入如下指令:
sudo apt install ros-melodic-desktop-full
过程中会提示一次整个安装大概会占用接近2个G的存储,询问是否继续安装,如下图所示:
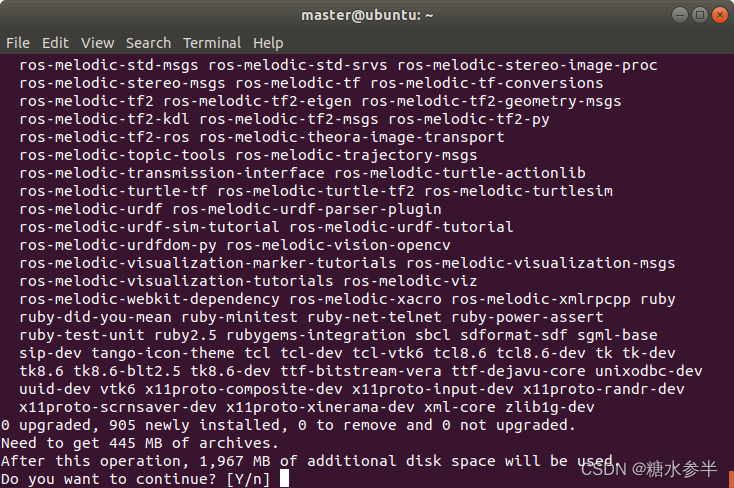
我们在终端输入 Y,然后按回车键进入正式安装,耐心等待,整个安装过程确保网络状态良好,否则会遇到很多未知问题。安装完成后如下图所示:
1.2.6 设置环境变量
ROS 的默认安装路径为 /opt/ros,但是系统默认的可执行程序大多存放在 /usr/bin目录,由于后续我们需要经常在终端中使用 ROS 相关的命令,为了能够便利地找到 ROS 命令所在的位置,这里我们把 ROS 的环境变量做一些设置,命令如下:
echo “source /opt/ros/melodic/setup.bash” >> ~/.bashrc
source ~/.bashrc
1.2.7 安装常用命令行工具和依赖
到目前为止,已经安装了运行核心 ROS 软件包所需要的基本内容。此外为了便于后续开发,这里还是推荐继续安装一些常用的命令行工具和其他的一些依赖,打开终端输入以下命令:
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
1.2.7 初始化 rosdep
在使用很多 ROS 工具之前,我们需要先初始化 rosdep。当我们要编译代码或者使用 ROS 的某些核心组件的时候,rosdep可以很容易地帮我们安装相关的依赖,安装步骤如下:
如果还没有安装rosdep,在终端中输入如下命令(在上一小节其实已经安装过):
sudo apt install python-rosdep
安装完成后就可以初始化 rosdep,按顺序输入以下命令:
sudo rosdep init
rosdep update
1.2.8 完成安装并检验
至此我们已经完成 ROS 的全部安装工作,这时候我们在终端输入如下指令以检验 ROS 是否成功安装。
roscore
结果信息如下
恭喜完成繁琐的安装过程,接下来的课程会更加精彩!!
参考文献:
[1]:http://www.iflyros.com/courseInfo?id=82