相关文章

pip3在Ubuntu下的安装、升级、卸载
一、参考资料
pip 常用命令 pip 官方文档
二、安装pip包
如何在 Ubuntu 20.04 上安装 Python Pip - 知乎 (zhihu.com)
1. 离线安装
Installation pip下载地址
1.1 为 Python 3 安装 pip
方式一
# 下载get-pip.py脚本
wget https://bootstrap.pypa.io/pip/3.6/get-pip.p…

conda和pip卸载包的注意事项
安装和import时包的名称不一致时,比如scikit-learn和sklearn(scikit意思是科学工具箱,通常被缩写成sk, 比如scikit-image和skimage也是同样的情况) 卸载的时候还是应该用包的全称,也就是与安装时一致用pip安装的就要用…
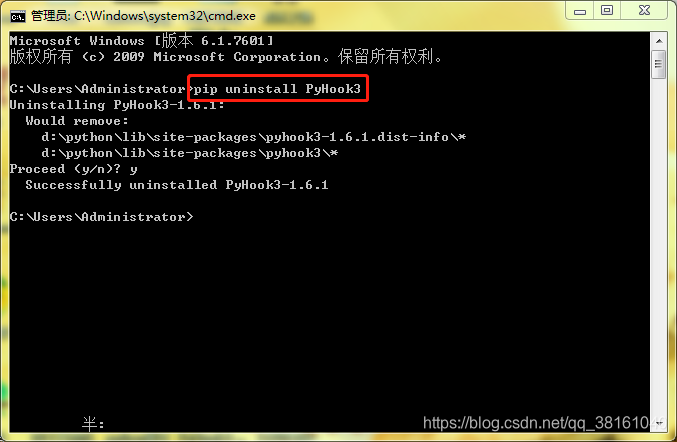
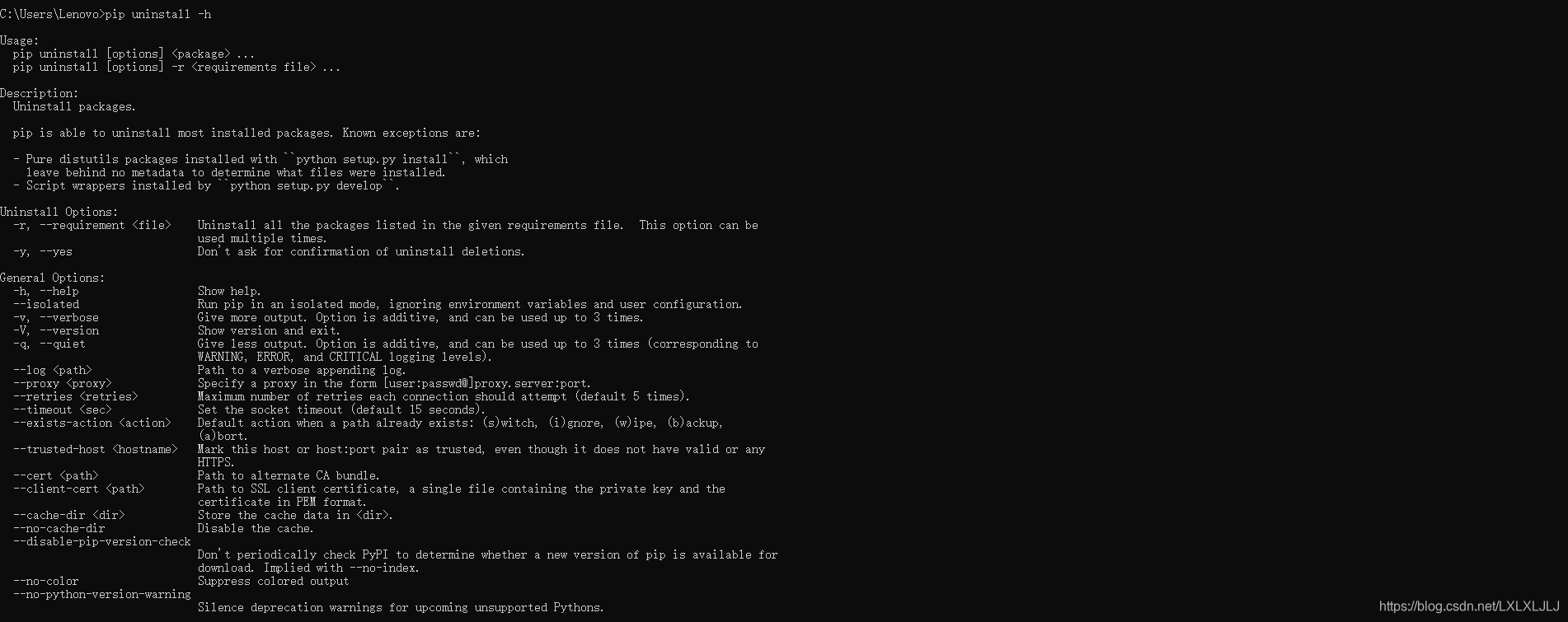
Python 技巧篇-pip卸载python库实例演示,查看pip命令大全方法
因为安装的 PyHook3 没安装对吧,有点问题,就想着把它卸载掉,然后再重新安装一个,那应该怎么卸载呢?
非常简单,就是 pip uninstall xxx,正好和我们安装时的 pip install xxx 对应,下…
windows下将python自带的pip卸载了,怎么重新装pip
文章目录 windows下将python自带的pip卸载了,怎么重新装pipLinux下将python自带的pip卸载了,怎么重新装pip新装Linux系统没有pip怎么装pip方法1方法2方法3总结 Linux换pip为国内镜像源|pip换源|pip修改源 windows下将python自带的pip卸载了,怎…

解决“更新pip版本竟将pip卸载了,提示No module named ‘pip‘”
更新pip后,报错无权限之类的,结果在运行pip发现被卸载了。 ModuleNotFoundError: No module named ‘pip’ 
如何使用Pip卸载软件包?
Python Pip command provides search, install, update, uninstall packages. We can use pip command to uninstall packages easily even there are some alternatives like easy_install. Python Pip命令提供搜索,安装,更新,卸载软件包。 即使有easy_install之类的替代方…
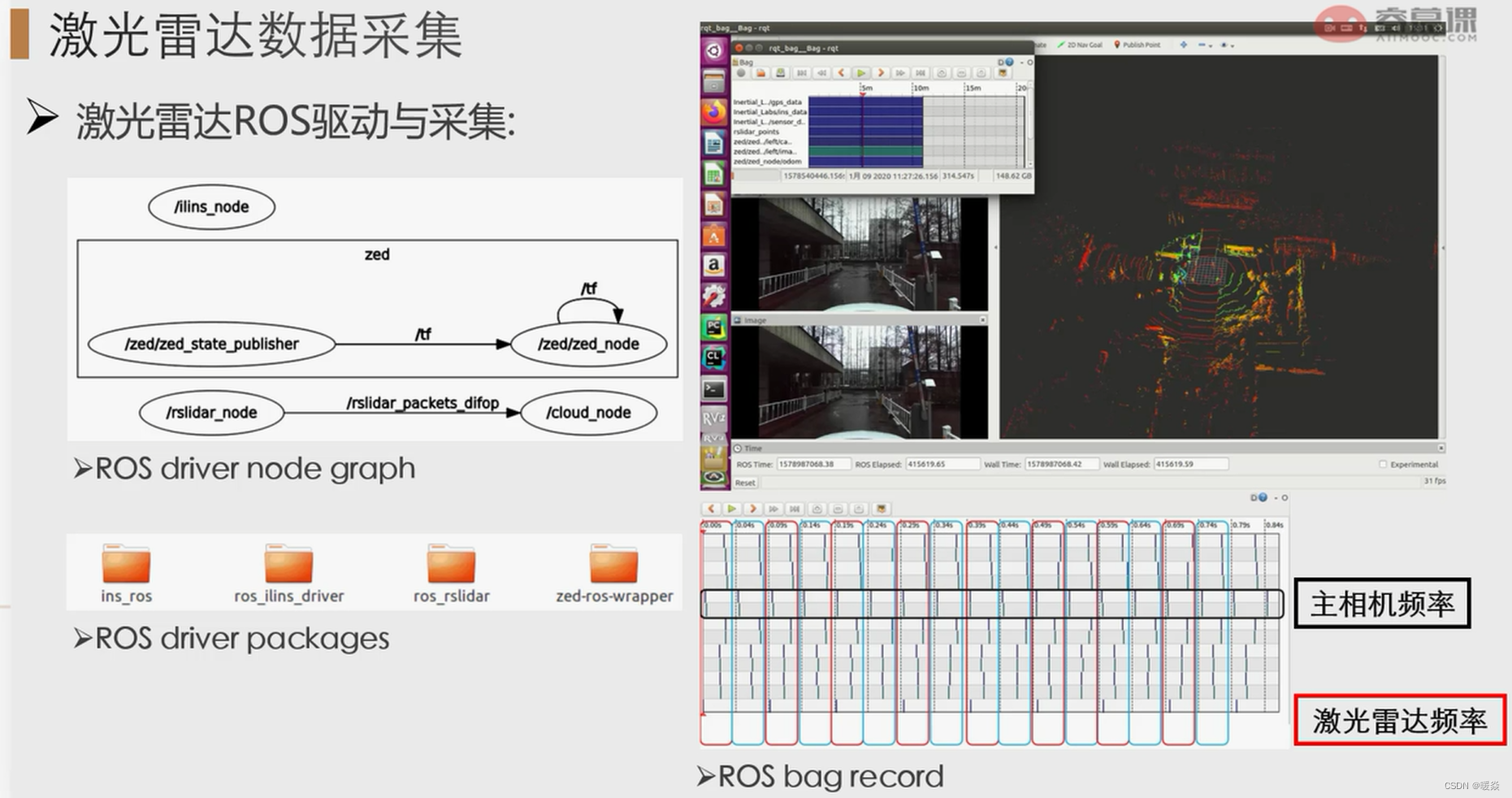
【三维点云】01-激光雷达原理与应用
文章目录 内容概要1 激光雷达原理1.1 什么是激光雷达?1.2 激光雷达原理1.3 激光雷达分类三角法TOF法脉冲间隔测量法幅度调制的相位测量法 相干法激光雷达用途 2 激光雷达安装、标定与同步2.1 激光雷达安装方式考虑因素 2.2 激光雷达点云用途2.3 数据融合多激光雷达数…
轻量化固态激光雷达的三维定位与建图
点云PCL免费知识星球,点云论文速读。 文章:Lightweight 3-D Localization and Mapping for Solid-State LiDAR 作者:Han Wang, Chen Wang, and Lihua Xie 编译:点云PCL 代码:https://github.com/wh200720041/ssl_slam.…
ROS移动机器人 Solidworks整个机器人设计文件(三维 激光雷达 arduino nvidia)(SLDPRT SLDASM)
还是17年本科时制作的毕业设计,基于solidworks 2014所制作。
文件里包含了制作的整个移动机器人的SolidWorks原文件。
是设计完各个零件然后组合在一起的,所以适用性很强,可以根据你的需求将绘制的零件加到你的机器人solidwroks三维中&…
Velodyne 16线三维激光雷达
Velodyne 16线三维激光雷达VLP-16介绍 16线激光雷达VLP-16是Velodyne公司出品的小型的3维激光雷达,保留了电机转速可调节的功能。实时上传周围距离和反射率的测量值。16线激光雷达VLP-16具有100米的远量程测量距离。精巧的外观设计使得安装非常方便。重量轻…
技术分享 | 带你探索三维激光雷达“眼中”的世界
远在火星的美国毅力号探测器早已开始工作,并不断的采集火星的数据传回到地球。现实中距离大众最近的无人车有谷歌的Google Driverless Car,以及特斯拉的model电动汽车。无人驾驶汽车正逐渐走进普通人的生活中。 毅力号火星探测器 谷歌无人汽车 提到无人驾…

ubuntu18.04使用calibration_toolkit进行相机和三维激光雷达的联合标定
一、配置 硬件配置:
速腾聚创激光雷达32线、usb相机;
软件配置:
ubuntu18.04、calibration_toolkit、autoware1.12.0、opencv3.4.3
(软件的安装及配置遇到的问题可以参考我别的博客,可能会有你想要的答案,标定其实…
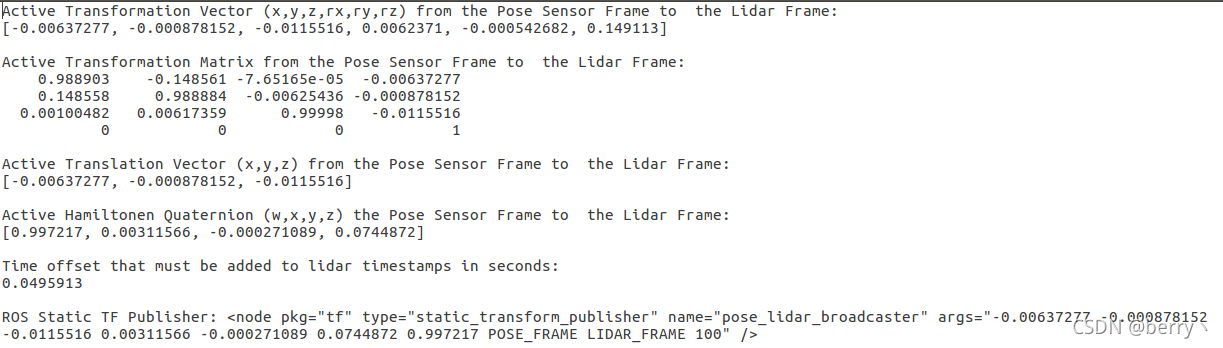
ubuntu16.04 lidar_align实现三维激光雷达和Imu联合标定
实现环境:
系统环境: Ubuntu16.04激光雷达: velodyne16线imu品牌 : xsens
一 简介
lidar-imu标定方法为瑞士苏黎世理工大学-自动驾驶实验室开源的一种校准 3D 激光雷达和 6 自由度位姿传感器外参的方法。该方法需要大量非平面…
【ouster】ubuntun18.04安装ouster三维激光雷达ros版本驱动
1、下载驱动文件 需先创建一个ros工作区间,如何将代码下载至src文件夹
mkdir catkin_ws_ouster/srccd catkin_ws_ouster/srccatkin_init_workspacecd ..source devel/setup.shsudo gedit ~/.bashrc#将下列代码添加至打开的文件source ~/catkin_ws_ouster/devel/set…
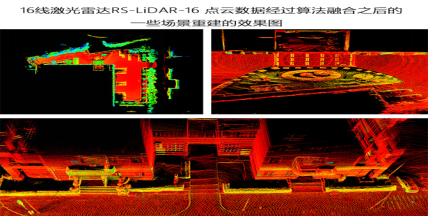
激光雷达--C16镭神16线三维激光雷达使用
一、基础知识介绍
1、点云数据一边采集一边重构,对处理器的硬件资源消耗特别大,所以用电脑作为处理器时,电脑的配置要高,具体需要什么杨的配置,下面会有数据介绍。
2、虽然激光雷达采集的数据和摄像头采集的数据没法…
基于曲率的体素聚类的三维激光雷达点云实时鲁棒分割方法
点云PCL免费知识星球,点云论文速读。 文章:Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance 作者:Seungcheol Park, Shuyu Wang, Hunjung Lim, and U Kang 编译:点云PCL…
从零开始的三维激光雷达SLAM教程第一讲(搭建运行环境,并跑Kitti数据集)
文章目录 引言第一节:运行xx-LOAM与数据集编译A-LOAM安装ceres(最小二乘求解库)安装pcl(最常见的点云处理库)安装OPENCVcatkin_make 制作Kitti数据集运行A-LOAM建图LOAM安装Lego-LOAM安装gtsam安装 结果 引言
毕业设计…
三维激光雷达点云处理分类
三维激光雷达点云处理分类TOC 目录 激光雷达点云的研究激光雷达数据的处理方法分类体素转化为图像直接对点云操作 三种方式的优劣 激光雷达点云的研究 目前,学术界和业界对于激光雷达点云的处理方式的研究变的非常热门。我认为原因有二: 来自学术界的推力…

三维激光雷达点云拼接
写在前面
这是一篇于2017.4.19完成的实验报告,现整理成博客,当时处于摸索阶段,水平有限,后来也未对点云处理进行深入的研究,在此只是记录一下。 主要参考资料为CloudCompare wiki document。 对三维点云的处理&…

基于二维激光雷达的三维激光扫描系统的设计与实现
CSDN话题挑战赛第2期 参赛话题:学习笔记
学习之路,长路漫漫,写学习笔记的过程就是把知识讲给自己听的过程。这个过程中,我们去记录思考的过程,便于日后复习,梳理自己的思路。学习之乐,独乐乐&a…