点云PCL免费知识星球,点云论文速读。
文章:Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance
作者:Seungcheol Park, Shuyu Wang, Hunjung Lim, and U Kang
编译:点云PCL
代码:https://github.com/wangx1996/Lidar-Segementation
欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。文章仅做学术分享,如有侵权联系删文。未经博主同意请勿擅自转载。
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。
摘要
给定3D激光雷达点云,我们如何快速准确地实现分割?快速准确地分割三维激光雷达点云是移动机器人技术中的一个重要问题,在分类、跟踪、SLAM等领域有着广泛的应用。尽管其重要性,但现有的方法不能同时满足速度和精度;特别是,在3D视觉领域中执行分割的方法速度太慢,无法在实时处理中使用,在本文中,我们提出了曲率体素聚类(CVC),这是一种利用激光雷达优化的曲率体素快速准确地分割三维激光雷达点云的方法,CVC通过考虑三维激光雷达点云聚类的三个重要方面来实现精细识别:距离传感器的距离、方向分辨率和点云的稀有性,CVC通过使用哈希表管理曲率体素,成功地提供了实时性能,特别是CVC在稀疏的3D点云上运行良好表现,实验表明,该方法比其他分割方法快1.7倍,准确率高30%,CVC可以在一秒钟内进行20次以上的实时分割。
主要贡献
本文提出了基于曲率的体素聚类(CVC)方法,这是一种快速而准确的3D激光雷达点云分割方法。CVC通过引入
1)一种称为曲率体素的新空间基元,
2)考虑到3D激光雷达点云的三个不同属性的分割方法
3)一种高效的基于哈希的数据结构,高效、准确地分割点云。
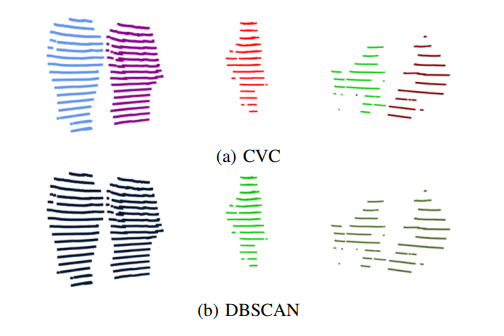
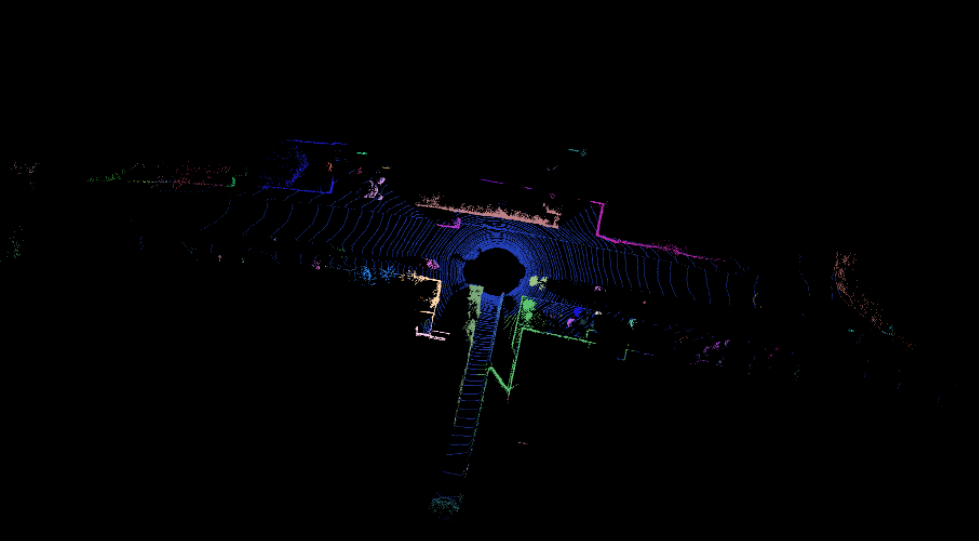
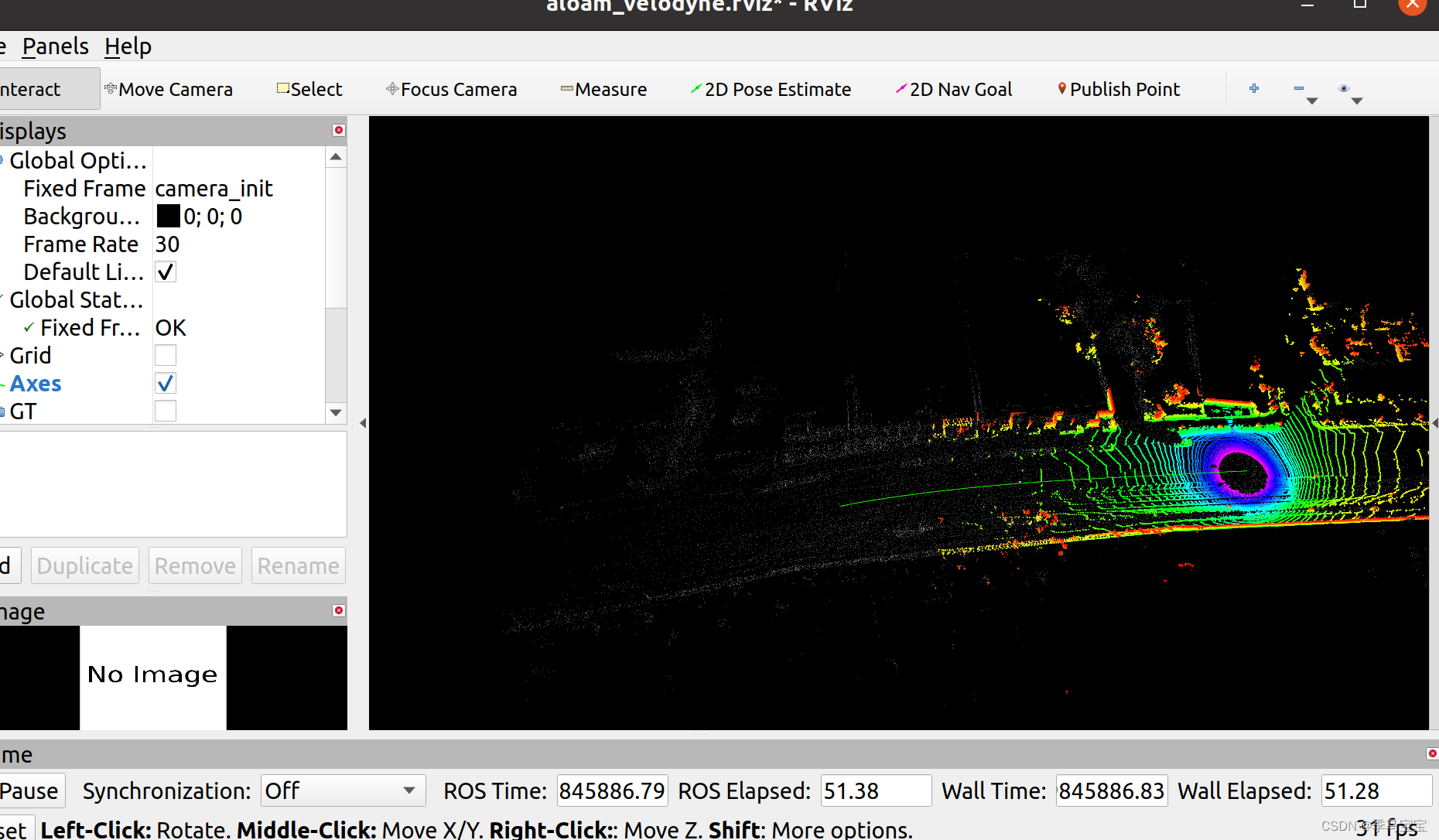
图1:使用Velodyne VLP-16扫描记录的数据对CVC和DBSCAN进行分割的结果,只有CVC能正确地将五个人分开,即使他们彼此距离很近。
图1显示了一个有五人的3D激光雷达点云的案例研究,每种颜色表示一个簇。这里应该注意,即使五个人彼此距离很近,CVC也能正确地将他们分为五组,而DBS可能会错误地将他们分为三组。
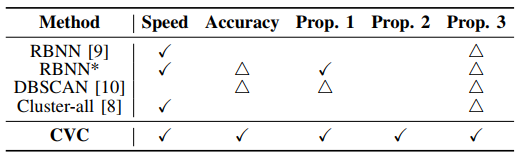
表一显示了CVC与其他方法在各个方面的比较。RBNN*表示对RBNN的改进版本。CVC是唯一一种快速且能够准确且考虑了3D激光雷达点云分割所有独特特性的方法。故本文的主要贡献如下:
新的空间方法,我们设计了曲率体素,这是一个激光雷达优化的空间单元,反映了3D激光雷达点云的显著特征.
算法,提出了CVC方法,这是一种利用激光雷达优化的曲率体素和高效的基于哈希的数据结构分割三维激光雷达点云的有效方法。
实验,我们给出的实验结果表明,CVC方法分割3D激光雷达点云的速度比其他竞争对手快1.7倍,准确度高30%。特别是,CVC具有正确区分相邻人群的优势。
主要内容
A. 分割三维激光雷达点云所需的属性
由于三维点云是由激光雷达传感器放射状发射的激光扫描生成的,它们具有以下三个不同的属性。
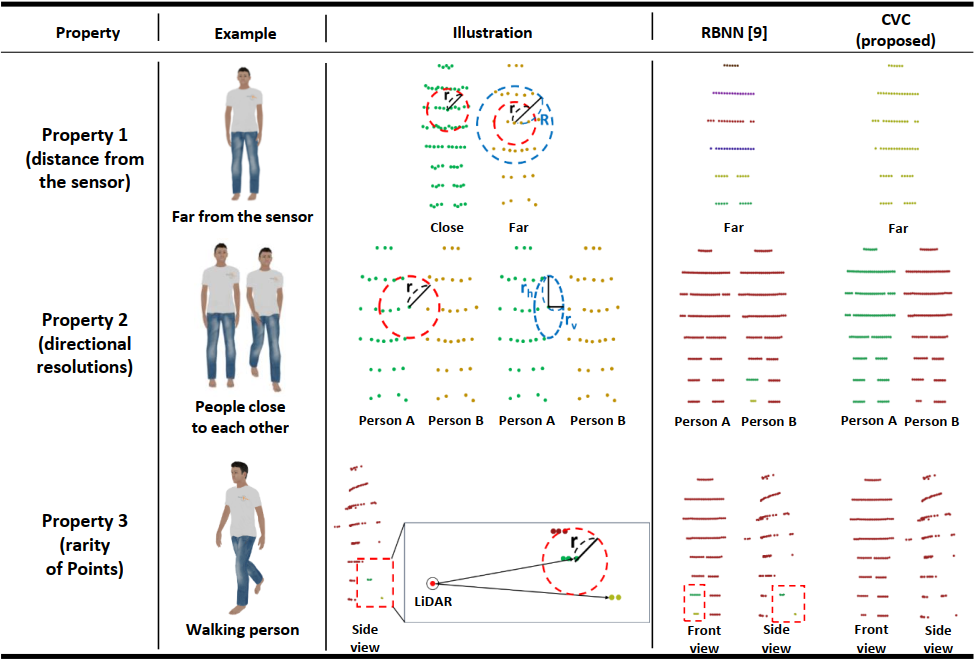
图2:3D激光雷达点云的三个不同属性,CVC方法设考虑所有的属性进行精确的分割
为了从具有上述特性的激光雷达传感器中正确分割3D点云,一种好的分割方法需要满足以下所需属性:
属性1(考虑到与传感器的距离):正确分组点云,而不考虑它们与激光雷达传感器的距离。
属性2(考虑方向分辨率):考虑水平和垂直角度分辨率的差异。
属性3(考虑点云的稀疏性):正确分组连续垂直激光扫描检测到的点云,即使它们在径向上有很大的深度差异。图2示出了使用RBNN分割3D激光雷达点云的示例,RBNN将每个点分组在固定半径r的圆中。第三列显示RBNN的失败案例(红色)和所需案例(蓝色)。
B. 算法概述
三维激光雷达点分割的主要挑战如下:
1)最大限度地提高分割效率,我们如何有效地实时分割数千个点云?
2) 最大化分割精度,我们如何才能正确地分割每一个物体,即使它们距离很近?
我们用以下想法解决上述挑战:
1)曲率体素:球坐标中的一种新型空间基元。
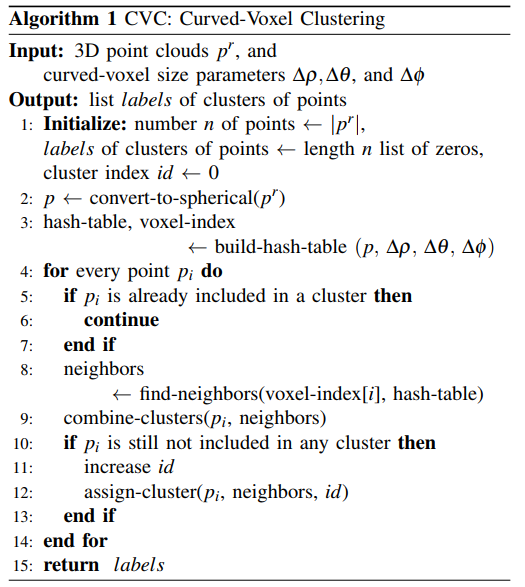
2)弯曲体素聚类(CVC):一种使用曲率体素的新分割算法。提出了一种基于曲率体素的三维激光雷达数据快速准确分割方法CVC。
CVC(算法1)包括四个步骤:首先,我们将笛卡尔坐标转换成球面坐标,P=[r;q;f],其中r是与传感器的径向距离,q是方位角,f是极角。其次,我们构建一个哈希表,将曲率体素索引映射到体素内的点索引。第三,我们使用哈希表在相邻的曲率体素中找到每个点的相邻点。最后,我们将每个点及其邻域合并为一个簇。图3显示了通过二维图示运行CVC的示例。
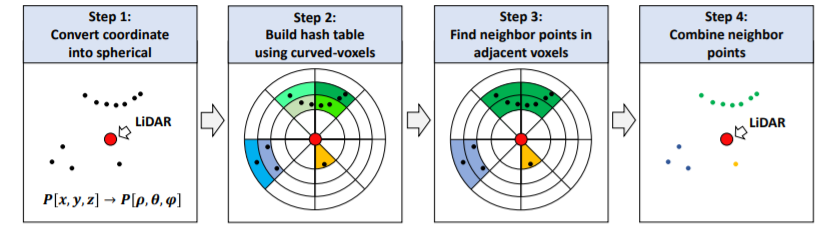
图3:CVC的步骤,使用鸟瞰图。在第一步中,我们将笛卡尔坐标转换成球面坐标。在第2步中,我们构建一个哈希表,将曲率体素索引映射到每个体素中包含的点的索引。在第3步中,我们在每个目标体素(包括包含目标点的体素)周围的9个体素内找到相邻点。在最后一步4中,我们将相邻点组合成一个簇。请注意,附近的点被分组为不同颜色的簇。
实验
所有实验都是在一台配备英特尔i7-8700处理器和32GB内存的机器上,在Ubuntu 16.04 LTS上使用机器人操作系统(ROS)Kinetic和Gazebo 7进行的。该方法将CVC与RBNN、DBSCAN和Cluster all方法进行了比较,RBNN是RBNN的改进版本,使半径r与距离传感器成比例,通过这种修改,RBNN*能够满足期望以提高精度。我们在最近的研究的基础上分配RBNN的参数,并基于CVC实现分割。
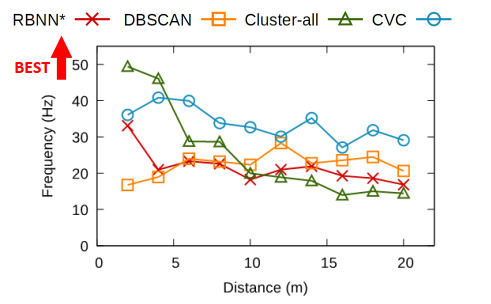
图5:合成数据在不同距离上的分割性能。CVC在大多数情况下给出了最大的分割频率
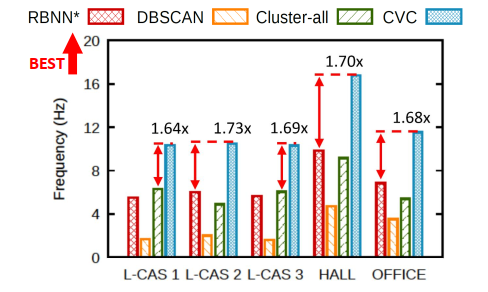
图6:真实世界数据的分割性能,CVC有效地分割真实世界的3D点云,提供高达1.7倍的分割频率
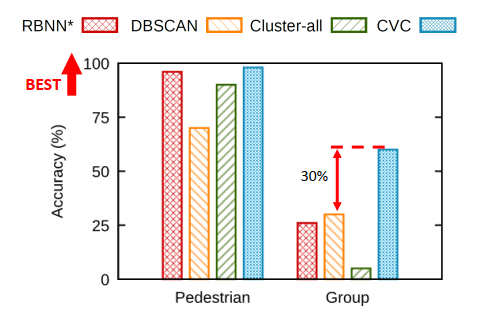
图7:真实世界数据的分割精度,CVC提供最高的精确度
总结
在本文中,我们提出了一种快速准确的三维激光雷达点分割方法CVC。我们设计曲率体素,一种新的空间基元,考虑3D激光雷达点的不同特征,我们还提出了一种高效的基于哈希的数据结构来加速分割,与其他分割方法相比,CVC的速度快1.7倍,准确率高30%,此外,CVC在一秒钟内提供20次以上的分割结果,实现了对真实世界数据的实时分割效果。
资源
三维点云论文及相关应用分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
3D目标检测:MV3D-Net
三维点云分割综述(上)
3D-MiniNet: 从点云中学习2D表示以实现快速有效的3D LIDAR语义分割(2020)
win下使用QT添加VTK插件实现点云可视化GUI
JSNet:3D点云的联合实例和语义分割
大场景三维点云的语义分割综述
PCL中outofcore模块---基于核外八叉树的大规模点云的显示
基于局部凹凸性进行目标分割
基于三维卷积神经网络的点云标记
点云的超体素(SuperVoxel)
基于超点图的大规模点云分割
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
【开源方案共享】ORB-SLAM3开源啦!
【论文速读】AVP-SLAM:自动泊车系统中的语义SLAM
【点云论文速读】StructSLAM:结构化线特征SLAM
SLAM和AR综述
常用的3D深度相机
AR设备单目视觉惯导SLAM算法综述与评价
SLAM综述(4)激光与视觉融合SLAM
Kimera实时重建的语义SLAM系统
SLAM综述(3)-视觉与惯导,视觉与深度学习SLAM
易扩展的SLAM框架-OpenVSLAM
高翔:非结构化道路激光SLAM中的挑战
SLAM综述之Lidar SLAM
基于鱼眼相机的SLAM方法介绍
新年新姿势
欢迎各位伙伴,一起经营知识星球,加入我们新的收费知识星球,一起分享!有兴趣运营者可直接评论加群主微信!
如果你对本文感兴趣,请后台发送“知识星球”获取二维码,务必按照“姓名+学校/公司+研究方向”备注加入免费知识星球,免费下载pdf文档,和更多热爱分享的小伙伴一起交流吧!
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入免费星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享及合作方式:微信“920177957”(需要按要求备注) 联系邮箱:dianyunpcl@163.com,欢迎企业来联系公众号展开合作。
点一下“在看”你会更好看耶





![[对抗训练]“中国菜刀”安装,20180222](https://images2018.cnblogs.com/blog/1409315/201805/1409315-20180527003102485-1143800464.png)