Python Pip command provides search, install, update, uninstall packages. We can use pip command to uninstall packages easily even there are some alternatives like easy_install.
Python Pip命令提供搜索,安装,更新,卸载软件包。 即使有easy_install之类的替代方法,我们也可以使用pip命令轻松卸载软件包。
用Pip列出已经安装的Python软件包 (List Already Installed Python Packages with Pip)
Before uninstalling or removing Python packages with pip we will list already installed Python packages. We will use list command for pip like below.
在通过pip卸载或删除Python软件包之前,我们将列出已安装的Python软件包。 我们将如下所示对pip使用list命令。
$ pip list
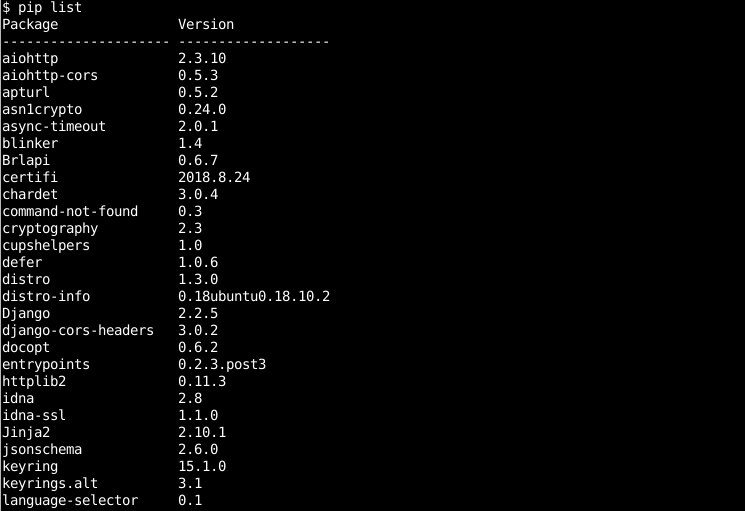
We can see that the following information is provided by listing installed packages.
通过列出已安装的软件包,我们可以看到以下信息。
- `Package` column shows the package complete name “包裹”列显示包裹的完整名称
- `Version` column shows the most recent version of the given package“版本”列显示了给定软件包的最新版本
列出/显示Python软件包信息,版本(List/Display Python Packages Information, Version)
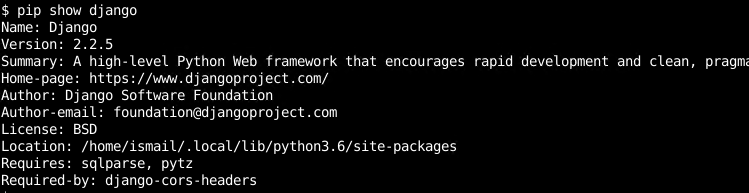
We can also show a given package complete information with the show command which can be useful before uninstalling it. In this example, we will show information about the Python package named Django.
我们还可以使用show命令显示给定的软件包完整信息,这在卸载之前可能很有用。 在此示例中,我们将显示有关名为Django的Python软件包的信息。
$ pip show django