文章目录
- windows下将python自带的pip卸载了,怎么重新装pip
- Linux下将python自带的pip卸载了,怎么重新装pip
- 新装Linux系统没有pip怎么装pip
- 方法1
- 方法2
- 方法3
- 总结
- Linux换pip为国内镜像源|pip换源|pip修改源
windows下将python自带的pip卸载了,怎么重新装pip
在更新pip的时候没有安装成功,但是却卸载成功了!于是乎pip就没有了。解决办法:
找到你python的安装目录的scripts文件夹。

win+R打开DOS命令窗口输入cmd;
cd 到你的Scripts文件夹中:
具体做法为:
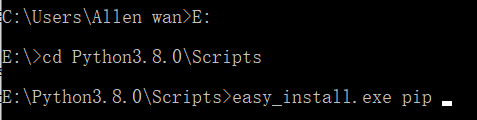
(1):直接输入盘符:
(2):cd 到你的python安装目录下的的Scripts文件夹下:
(3):执行easy_install.exe pip命令:
Linux下将python自带的pip卸载了,怎么重新装pip
新装Linux系统没有pip怎么装pip
方法1
1、安装python包管理工具
sudo apt-get install python3.7-distutils # 注意此处python版本要和系统对应2.1、如果python版本>=3.7,wget https://bootstrap.pypa.io/get-pip.pypython3 get-pip.py2.2 如果python版本<=3.6wget https://bootstrap.pypa.io/pip/<python版本>/get-pip.py# 此处的python版本要和系统对应,支持:2.6、2.7、3.2、3.3、3.4、3.5、3.6# 例如系统python为python3.6,则下载:wget https://bootstrap.pypa.io/pip/3.6/get-pip.pypython3 get-pip.py3、验证
pip -V
# 如果pip -V无法显示而pip3 -V可以显示,那就是没有创建pip->pip3的软链接方法2
1、下载安装setuptools
wget https://pypi.python.org/packages/28/4f/889339f38da415e49cff15b21ab27becbf4c017c79fbfdeca663f5b33b36/setuptools-36.4.0.zip
unzip setuptools-36.4.0.zip && cd setuptools-36.4.0
python setup.py build && python setup.py install2、下载安装pip,以下3个版本,任意下载一个即可,以9.0.1为例
#pip22.2.2版本
wget https://files.pythonhosted.org/packages/4b/30/e15b806597e67057e07a5acdc135216ccbf76a5f1681a324533b61066b0b/pip-22.2.2.tar.gz#pip1.5.4版本
wget https://pypi.python.org/packages/source/p/pip/pip-1.5.4.tar.gz#pip9.0.1版本
wget https://pypi.python.org/packages/11/b6/abcb525026a4be042b486df43905d6893fb04f05aac21c32c638e939e447/pip-9.0.1.tar.gz3、解压安装
tar xf pip-9.0.1.tar.gz
cd pip-9.0.1
python setup.py install4、验证
pip -V
# 如果pip -V无法显示而pip3 -V可以显示,那就是没有创建pip->pip3的软链接
方法3
sudo apt install python3-pip
总结
方法3会将pip3作为系统包进行安装,后期使用过程中易出现权限不足、库版本不对、无法import等一系列问题,不建议使用;
方法2建议安装pip9.0.1,因为该版本兼容所有python版本;
方法1建议使用该方法,其第一步会根据系统环境安装python开发包,第2步会根据系统python版本和环境安装合适的pip版本;
Linux换pip为国内镜像源|pip换源|pip修改源
pip config set global.index-url https://mirrors.aliyun.com/pypi/simple
pip config set install.trusted-host mirrors.aliyun.com# 该配置文件保存在:1、系统级: /etc/pip.conf2、用户级:/home/<username>/.config/pip/pip.conf# 可以手动修改配置文件,pypi.ngc.nvidia.com为nvidia的库托管地址
[global]
index-url = https://mirrors.aliyun.com/pypi/simple/[install]
trusted-host=mirrors.aliyun.compypi.ngc.nvidia.com
no-cache-dir = true
extra-index-url = https://pypi.ngc.nvidia.com