Velodyne 16线三维激光雷达VLP-16介绍
16线激光雷达VLP-16是Velodyne公司出品的小型的3维激光雷达,保留了电机转速可调节的功能。实时上传周围距离和反射率的测量值。16线激光雷达VLP-16具有100米的远量程测量距离。精巧的外观设计使得安装非常方便。重量轻,只有830g,非常适合安装在小型无人机和小型移动机器人上。
16线激光雷达VLP-16每秒高达30万个点数据输出。±15°的垂直视场,360°水平视场扫描。IP67的防护等级。
16线激光雷达VLP-16支持两次回波接收,可以测量次回波和后一次回波的距离值和反射强度值。
16线激光雷达VLP-16技术参数:
激光线数:16线;
测量范围:高达100m;
测量精度:±3cm;
支持两次回波;
垂直测量角度范围:30°(﹢15°到﹣15°);
垂直方向角度分辨率:2°;
水平方向测量角度范围:360°;
水平方向角度分辨率:0.1°到0.4°;
测量频率:5到20Hz;
可以通过网络浏览器监测和改变电机的转速;
激光安全等级:1级(人眼安全);
激光波长:905nm;
传感器功率:8W(典型值);
工作电压:9-32V;
重量:830g;
外形尺寸:103mmX72mm;
振动测试:500m/sec² 振幅,持续时间11msec;
振动:5Hzto2000Hz,3Grms;
防护等级:IP67;
工作温度:﹣10℃到﹢60℃;
储存温度:-40℃到﹢105℃;
输出:
每秒高达30万个测量点输出;
100M快速以太网连接;
数据包包含:距离值、物体反射率、旋转角度、同步时间(μs分辨率);
支持外接GPS;
16线激光雷达VLP-16行业应用:汽车自动驾驶、建图测量、测绘、高精度地图、机器人导航避障、环境3维建模、自动化行业




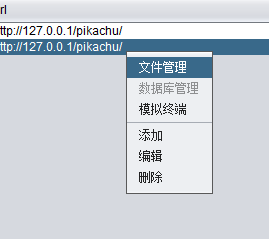
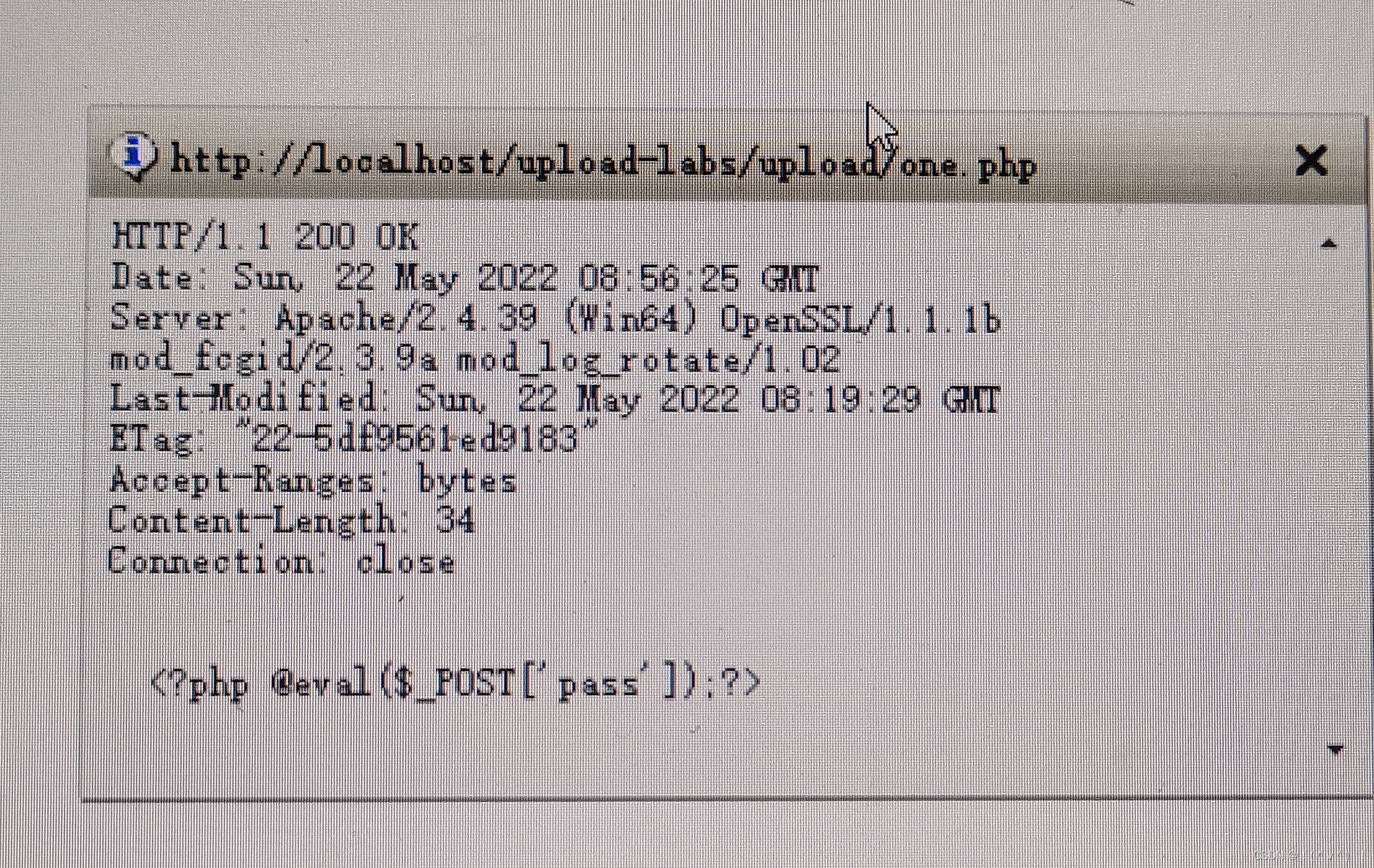


![[对抗训练]“中国菜刀”安装,20180222](https://images2018.cnblogs.com/blog/1409315/201805/1409315-20180527003102485-1143800464.png)
