远在火星的美国毅力号探测器早已开始工作,并不断的采集火星的数据传回到地球。现实中距离大众最近的无人车有谷歌的Google Driverless Car,以及特斯拉的model电动汽车。无人驾驶汽车正逐渐走进普通人的生活中。

毅力号火星探测器

谷歌无人汽车
提到无人驾驶,就不得不提到环境感知,环境感知是实现无人驾驶的核心技术之一,其任务是通过车载传感器来识别周围的环境信息,从而为无人驾驶汽车(无人车)的导航定位、路径规划和决策控制提供信息支撑。对周围环境感知的目标主要包括静态障碍物(路面、路牙、植物、建筑等)和动态障碍物(车辆、行人、自行车等)。无人车障碍物检测是指通过分析传感器获取的道路环境信息,判别车辆行驶过程中静态障碍物和动态障碍物。
相比于可见光、红外线等传统被动成像技术,三维激光雷达技术具有如下显著特点:一方面,它颠覆传统的二维投影成像模式,可采集目标表面深度信息,得到目标相对完整的空间信息,经数据处理重构目标三维表面,更能获得反映目标几何外形的三维图形,同时还能获取目标表面反射特性、运动速度等丰富的特征信息,为目标探测、识别、跟踪等数据处理提供充分的信息支持、降低算法难度;另一方面,主动激光技术的应用,使得其具有测量分辨率高,抗干扰能力强、抗隐身能力强、穿透能力强和全天候工作的特点。
激光雷达主要包括激光发射、扫描系统、激光接收和信息处理四大系统,这四个系统相辅相成,形成传感闭环。首先激光发射系统中激励源周期性地驱动激光器,发射激光脉冲,激光调制器通过光束控制器控制发射激光的方向和线数,最后通过发射光学系统,将激光发射至目标物体;扫描系统负责以稳定的转速旋转起来,实现对所在平面的扫描,并产生实时的平面图信息;激光接收系统中光电探测器接受目标物体反射回来的激光,产生接收信号;信息处理系统中接收信号经过放大处理和数模转换,经由信息处理模块计算,获取目标表面形态、物理属性等特性,最终建立物体模型。激光雷达主要工作原理如下图1所示。

图1:激光雷达工作原理

图2:激光雷达的工作原理
激光雷达采用飞行时间测量法(Time of Flight)。激光雷达发出激光脉冲开始计时(t1),当激光遇到目标物体光返回,接收端停止计时(t2),距离=光速×(t2-t1)/2。
以16线三维激光雷达举例,16线激光雷达装有16对激光发射接收模组,电机以5hz(或者10hz、 20hz)转速驱动进行360度扫描。
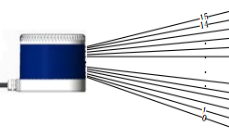
图3:16 线2度激光雷达示意图
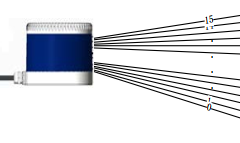
图4:16线1.33度激光雷达示意图
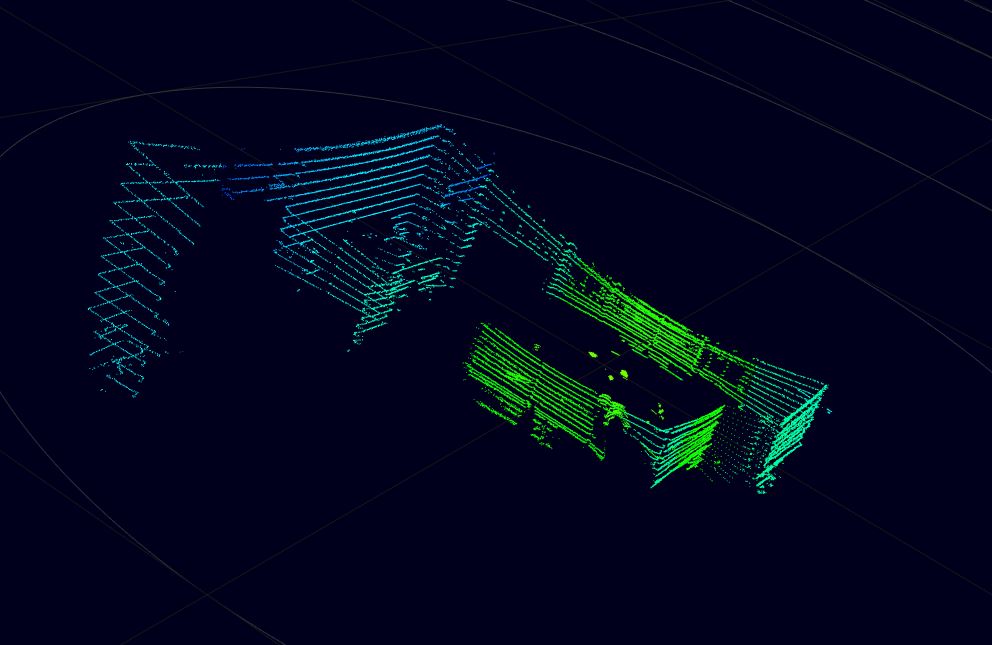
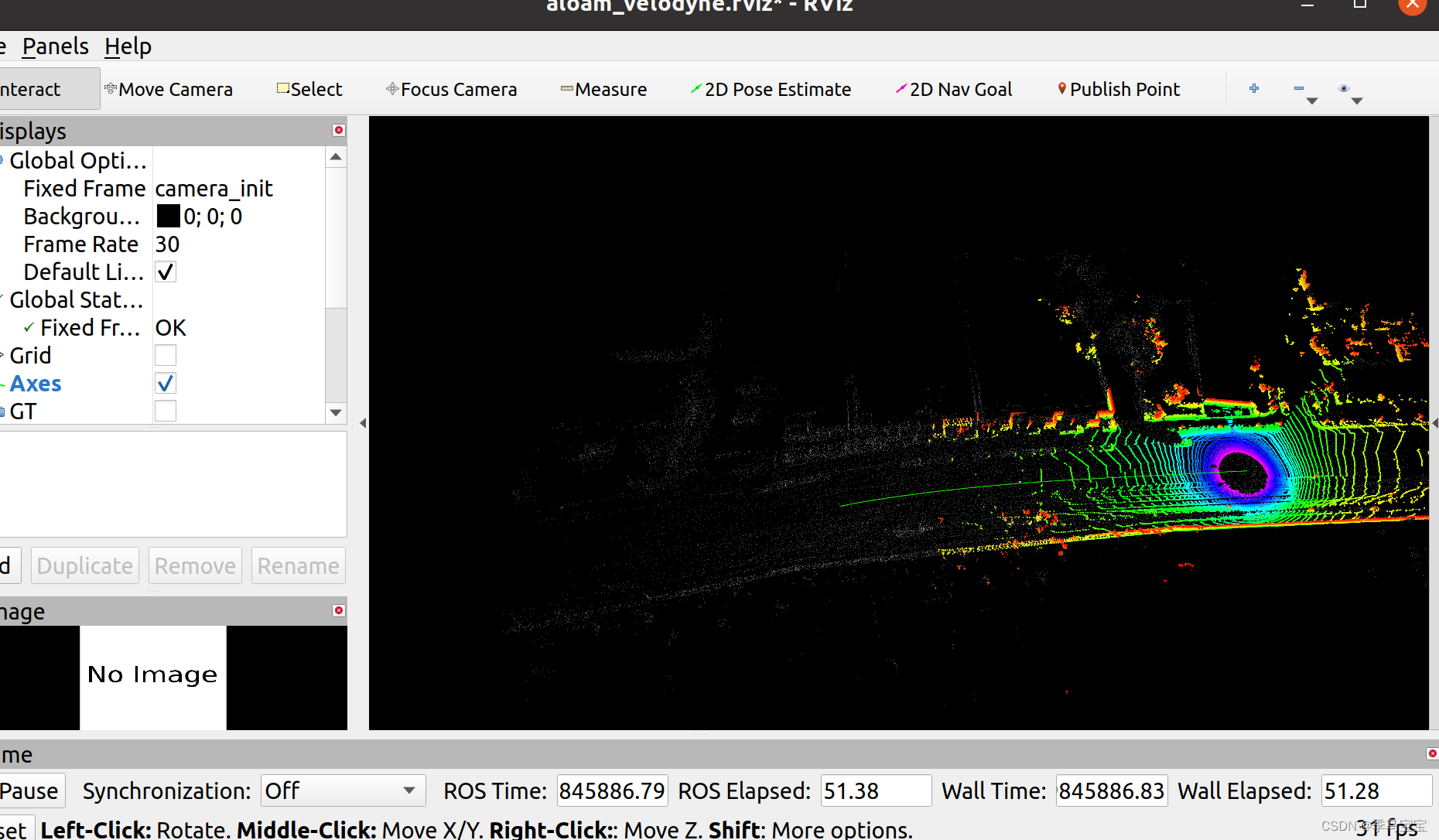
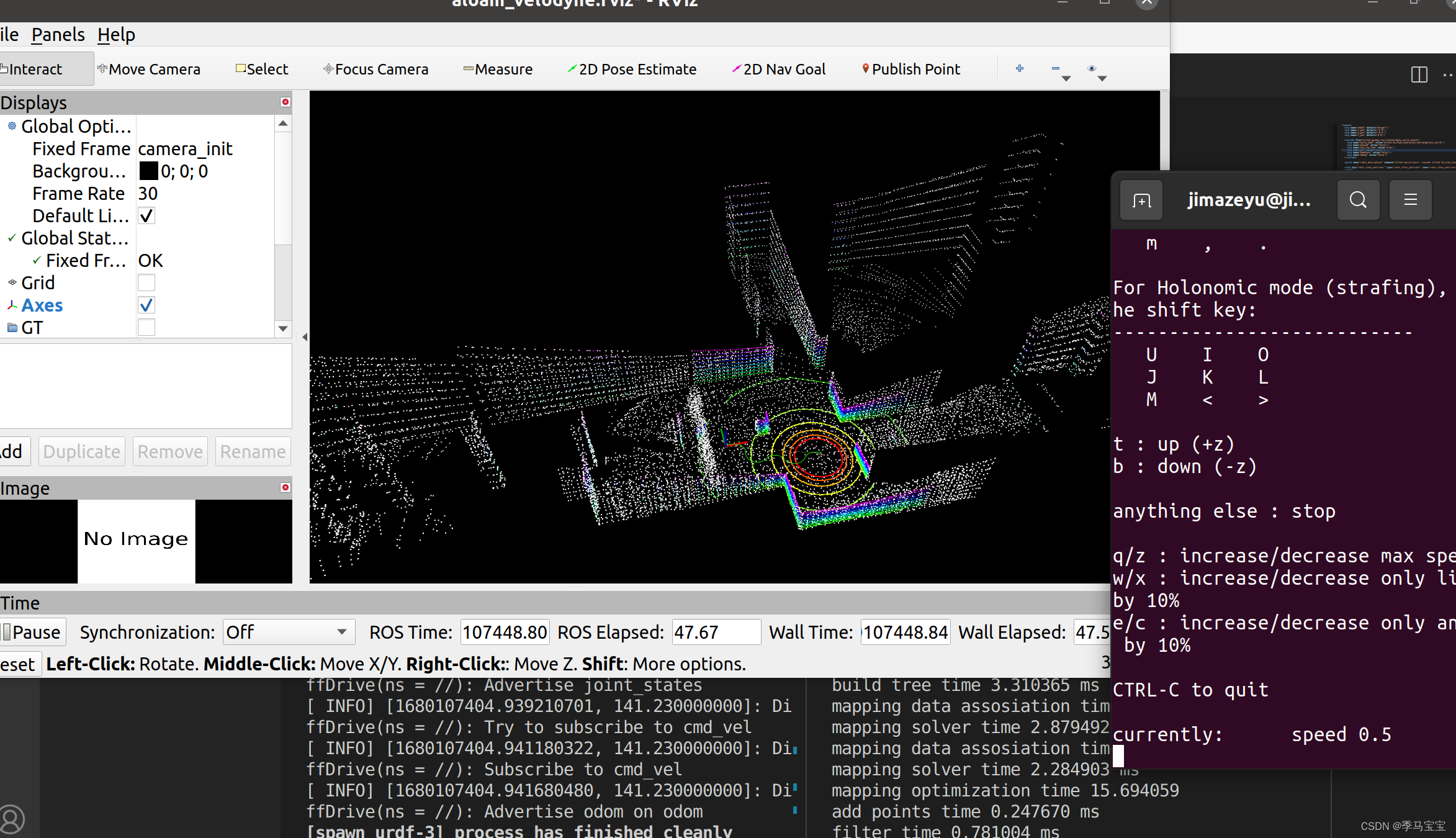
通过专用的软件,我们可以看到激光雷达所扫面出来的环境地图。从图中我们可以看到,16线激光雷达扫描到的环境特征信息比起单线激光雷达要丰富的多,同时距离和精度上都更加精准,对于障碍物而言还能得到它的高度信息。对于无人驾驶汽车而言,多线激光雷达的使用,就如同给汽车安装了一双“眼睛”,使其能更好的理解人类的世界。如以下的图6所示,安装在无人驾驶汽车上的16线激光雷达获得的点云数据经算法融合后所获得场景三维重建的效果图。
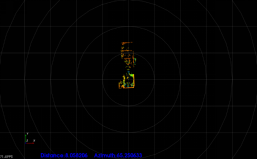
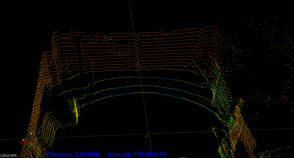
图5:激光雷达扫描的环境信息
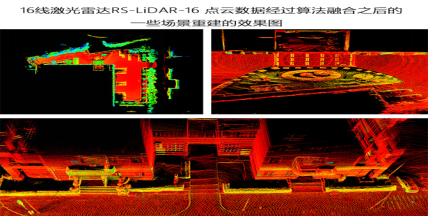
图6:16线激光雷达三维点云数据经算法融合后的三维重建效果图
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把无人机行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在无人机行业,就请关注我们的公众号,我们将持续发布无人机行业最有价值的信息和技术。






![[对抗训练]“中国菜刀”安装,20180222](https://images2018.cnblogs.com/blog/1409315/201805/1409315-20180527003102485-1143800464.png)

