⛄一、基于粒子滤波污染源定位简介
1 混合定位的系统结构
本文提出的GPS/TDOA混合定位系统结构可见于图1。
移动终端集成了无线通信模块和GPS接收模块,终端可同时测得通信网络中相对于服务基站的TDOA和GPS卫星到终端的伪距。在CDMA通信系统中,从通信终端测量TDOA的具体方法和定义可参见标准[11]。GPS伪距修正后可得TOA。当GPS可定位、可见卫星数等于或多于4时,一般可采用GPS定位位置提供服务;当GPS无法定位时(通常是在可见卫星数少于4时),采用GPS/TDOA混合定位方式提供位置服务。下面将具体讨论混合定位的算法。
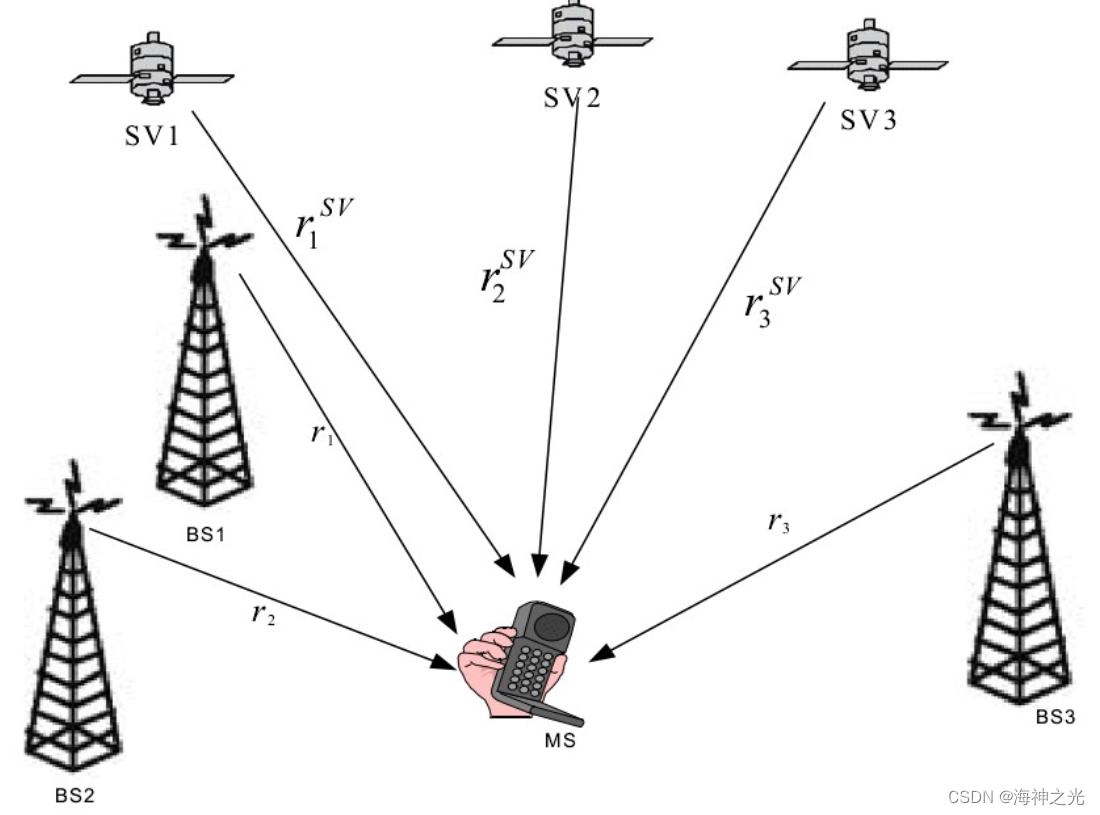
图1 CDMA通信网络GPS/TDOA混合定位结构
2 观测量测量模型
无线网络中,MS与BSi之间的距离(TOA)测量值可表示为:

其中,ri0为MS与BS之间TOA真值;εi为系统测量误差,一般服从零均值高斯分布,各εi之间相互独立;τei为NLOS引起的附加时延误差,一般服从非零均值高斯分布,各τei之间相互独立;N为参与定位测量的BS数目;
各BS与BS1到MS距离的差(TDOA)可表示为:

其中,r0i,1为TDOA真实值;ni,1为测量误差,包括了零均值、高斯分布的系统测量误差和非零均值、高斯分布的NLOS引起的附加时延误差。在NLOS环境下,NLOS误差一般远远大于LOS环境下的测量误差,因此在NLOS条件下,主要考虑NLOS误差,LOS环境下的高斯测量误差可忽略。BS1为距离移动终端最近的服务基站,所以ri,1一般为正值。
GPS观测方程为:

相对星座1做星际单差,消掉未知项b得:
GPS定位系统中,移动终端测得无线信号从卫星到达终端的传播距离,即伪距。一般,移动终端时钟与GPS标准时间都存在偏差。卫星的时钟差通过报文中信息补偿后可认为相互都已同步。因此,各GPS卫星伪距可表示为:

其中,rj为终端与卫星j之间的真实距离;b为终端时间偏差造成的距离差;Ij为电离层折射影响,可按有关辅助信息进行改正、消除;Tj为对流层折射影响,也可按有关辅助信息进行改正、消除。
⛄二、部分源代码
clc
clear
close all
%% 设置仿真环境
%GPS卫星坐标
GPSxyz=[
20000, 20000,20000;
-20000, 20000,20000;
-20000,-20000,20000;
20000,-20000,20000;
];
%基站坐标
BSxyz0=[1000,0,30];
BSxyz=[
0, 1000, 30;
-1000, 0, 30;
0,-1000, 30;
];
%目标真实坐标
xr=1000*(rand-0.5);
yr=1000*(rand-0.5);
zr=100*rand;
wr=0;
%% 模拟产生观测量
M=size(GPSxyz,1);%伪距观测量个数
N=size(BSxyz,1);%TDOA观测量个数
SigmaDist=20;%伪距观测误差,标准差,折算成距离(单位:米)
SigmaRho=60;%TDOA观测误差,标准差,折算成距离(单位:米)
Dist=zeros(M,1);
Rho=zeros(N,1);
for i=1:M
xgi=GPSxyz(i,1);
ygi=GPSxyz(i,2);
zgi=GPSxyz(i,3);
Dist(i)=sqrt((xr-xgi)2+(yr-ygi)2+(zr-zgi)^2)+normrnd(0,SigmaDist,1,1);
end
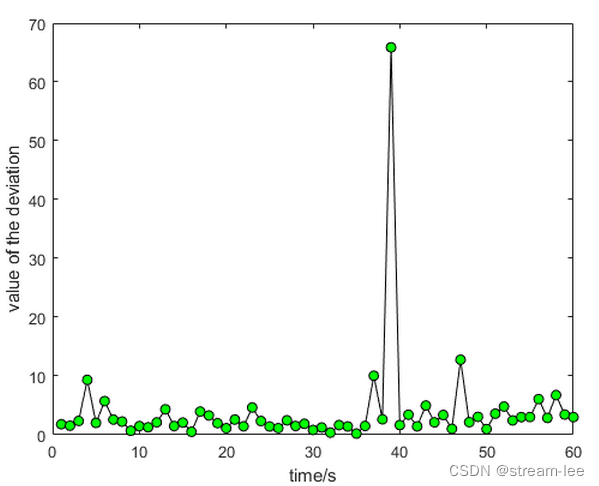
⛄三、运行结果


⛄四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]龚福祥,王庆,张小国.通信网络中的GPS/TDOA混合定位算法[J].中国惯性技术学报. 2011,19(02)
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除