目录
一、简介
二、环境介绍
三、接线连接
四、创建TwinCAT3程序工程
1、IO扫描和参数设置
2、字符串型数据发送和接收PLC程序创建
(1)库文件添加
(2)创建任务和程序
(3)变量关联
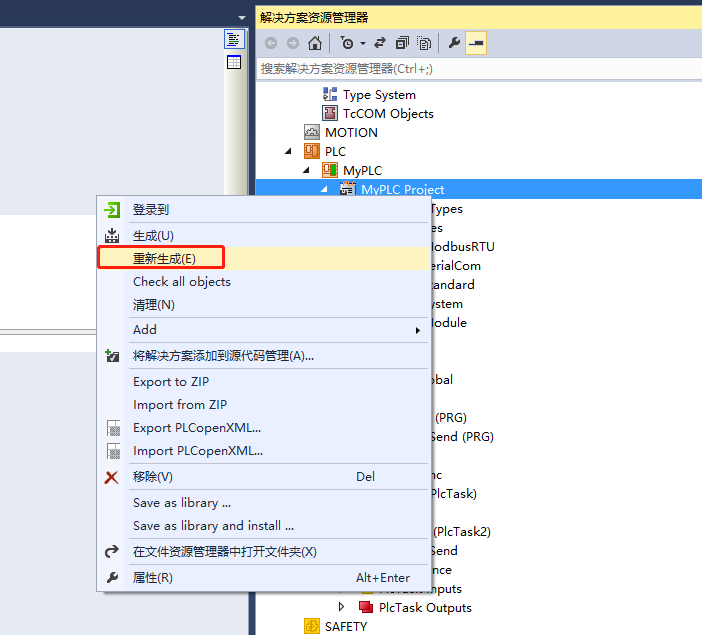
(4)重新激活工程、运行
3、运行和测试
(1)运行PLC程序
(2)串口调试助手和PLC程序测试
五、Byte型数据发送和接收
0、简介
1、变量创建
2、用户程序
3、测试
六、测试问题
七、程序工程下载链接
1、字符串型数据发送和接收程序工程
2、Byte型数据发送和接收程序工程
一、简介
EL6021是倍福推出的RS422/485串口通信模块,一般用作Modbus RTU通信的主站也可以做串口自由协议通讯,EL6021是单口RS422/485模块,EL6022是双口(DB9)RS422/485模块,且两个口可独立设置,互不影响。
EL6021支持2400…115200 kbuds的标准波特率,默认波特率为9600,8N1配置。 RS422支持全双工的通信模式,其发送数据线采用差分线对TxD+和TxD-,接收数据线也采用差分线对RxD+和RxD-,这样的设计方式增强了通信的抗干扰能力。 RS485支持半双工的通信模式,不支持全双工模式,只使用一对差分线进行数据传输,一般称为A和B或者TxD和RxD,这样的设计导致设备在发送数据的时候是无法接收数据的,因为总线被占用且正在进行发送操作。
EL6021出厂默认的工作模式是RS422。
二、环境介绍
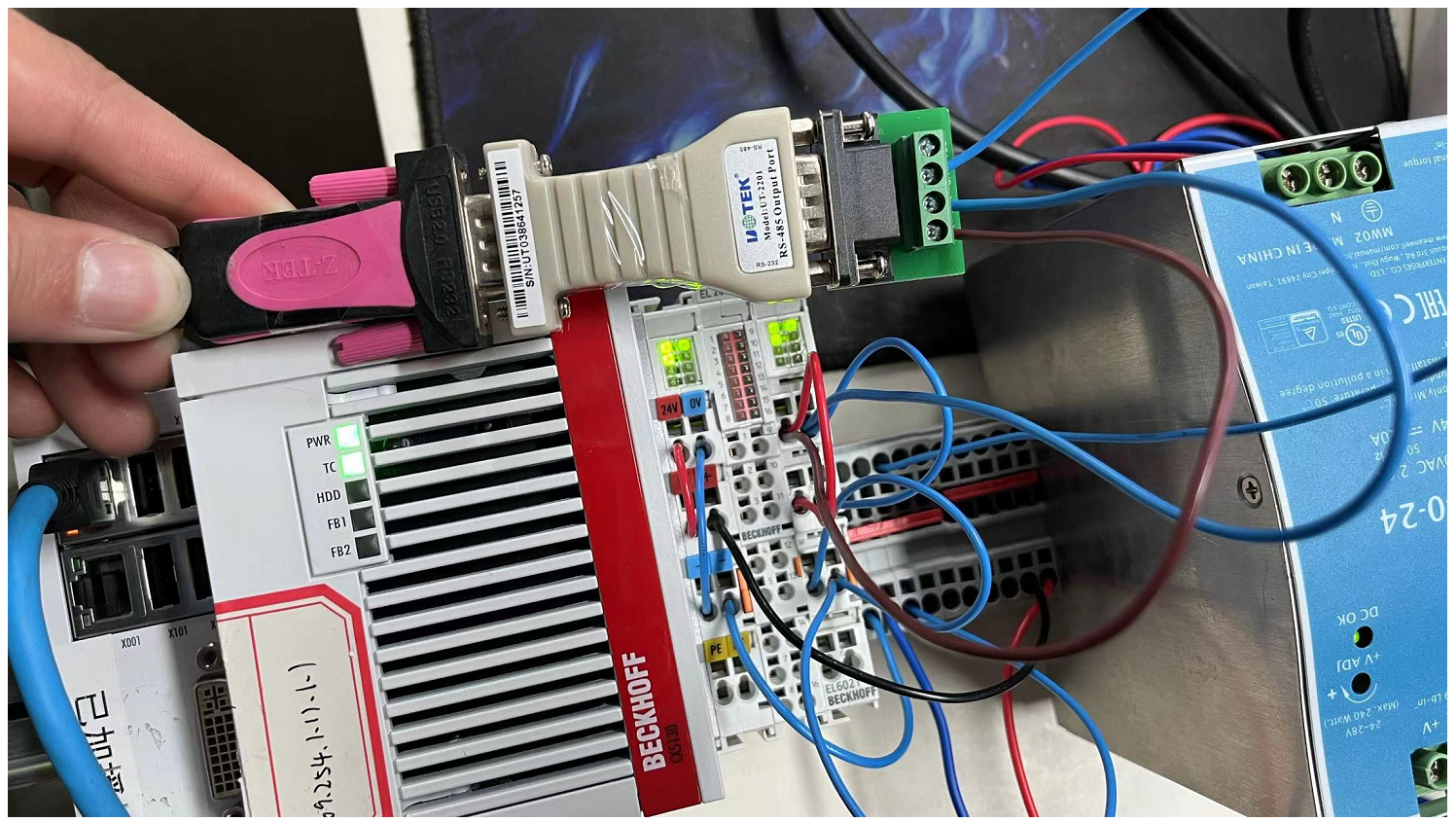
1、PLC端:CX5130-0125、EL6021,Twincat3
2、PC端:USB转232、232/485转换器,win10系统(USB转232驱动安装好)、串口调试助手
3、EL6021对应的软件授权需额外购买,测试使用7天试用
Modebus-RTU:TF6255
Serial-Communication:TF6340

三、接线连接
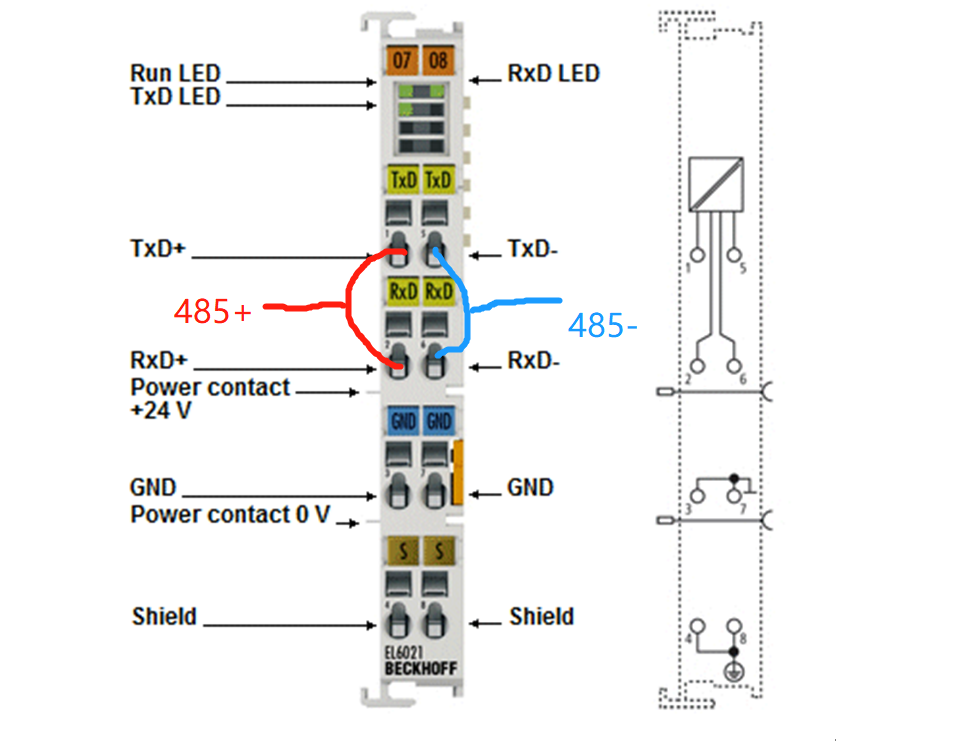
485模式 接线说明:
1和2短接然后跟第三方设备485正连接
5和6短接然后跟第三方设备485负连接
422模式 接线说明:
四根线分开依次连接。
首先确保接线正确,将EL6021上面的1、2短接,5、6短接,然后将EL6021的1和5管脚连接到电脑USB转485/422口的RXD+和RXD-上面,USB转485/422的驱动必须装好,这种方式采用485的接线方式,EL6021默认的COEONLINE设置就是485的方式。
EL6021和485的地GND,可以接也可以不接。建议都接0V。
四、创建TwinCAT3程序工程
1、IO扫描和参数设置
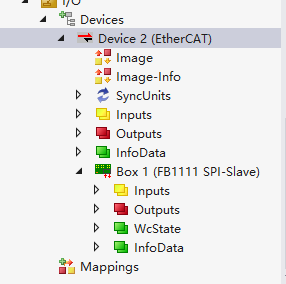
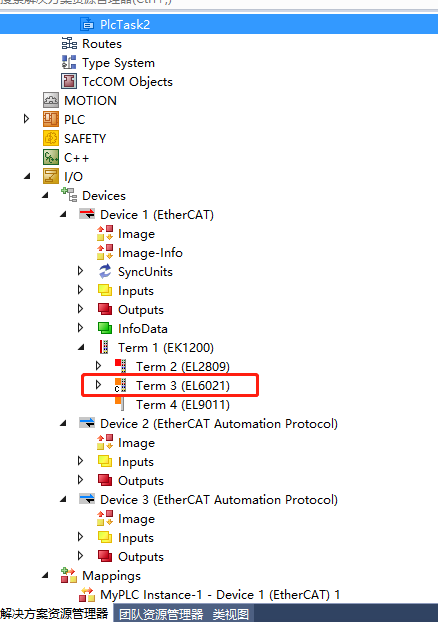
(1)配置模式下,在IO-Device进行硬件扫描。找到EL6021硬件模块。
(2)CeE-OnLine参数设置
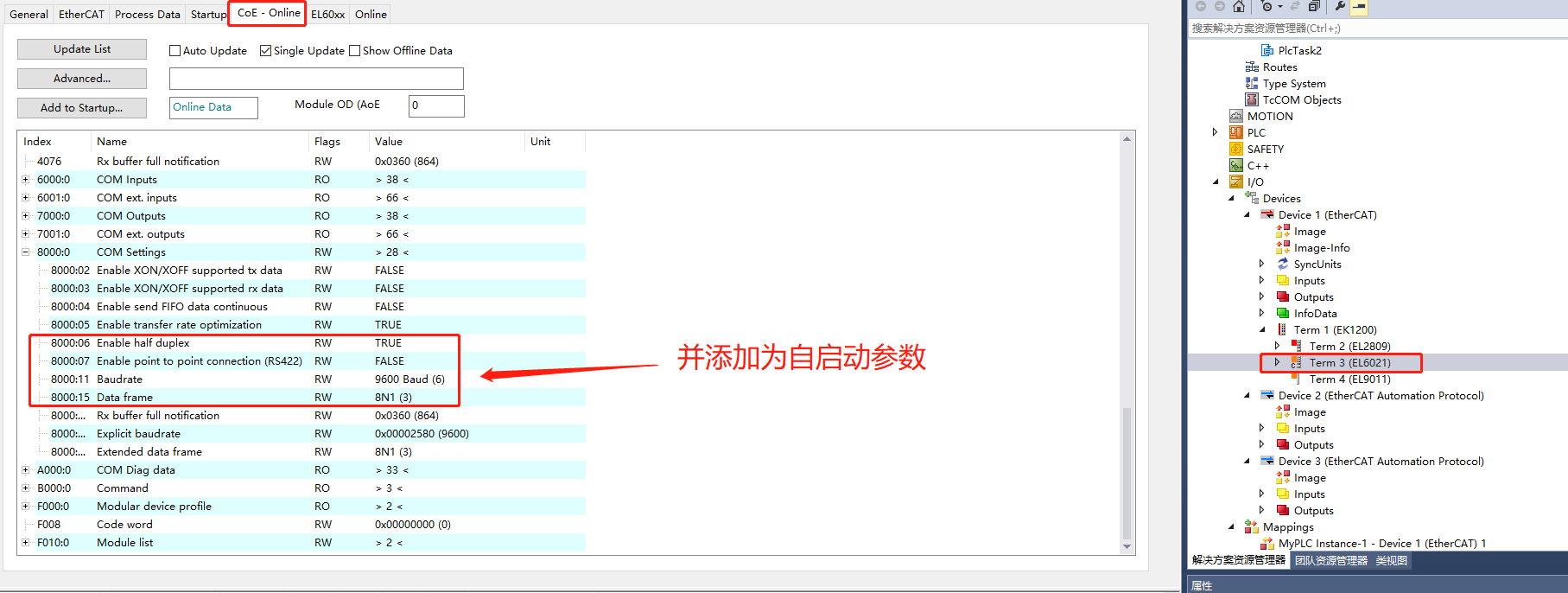
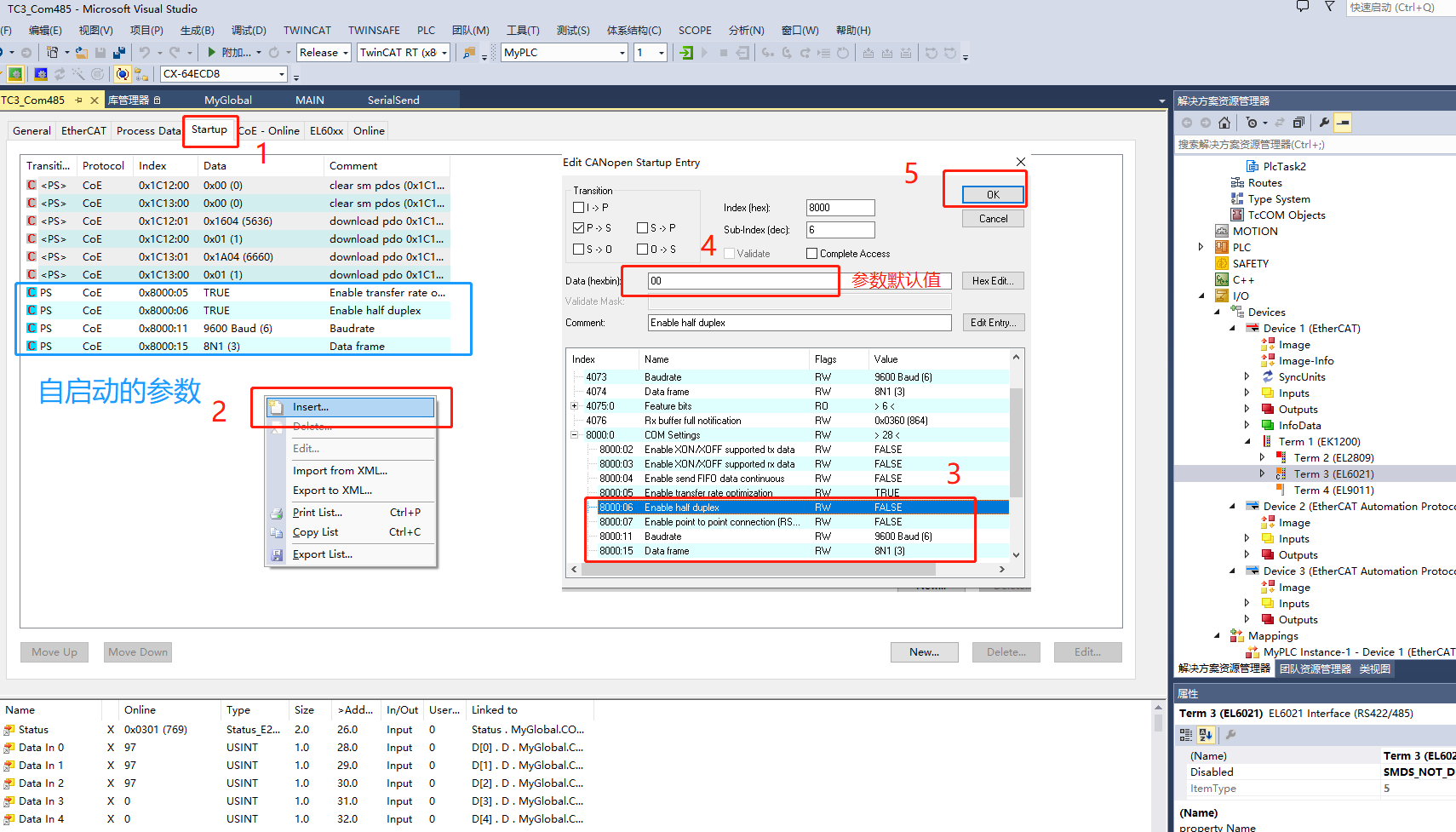
(3)设置自启动初始化时候参数值
2、字符串型数据发送和接收PLC程序创建
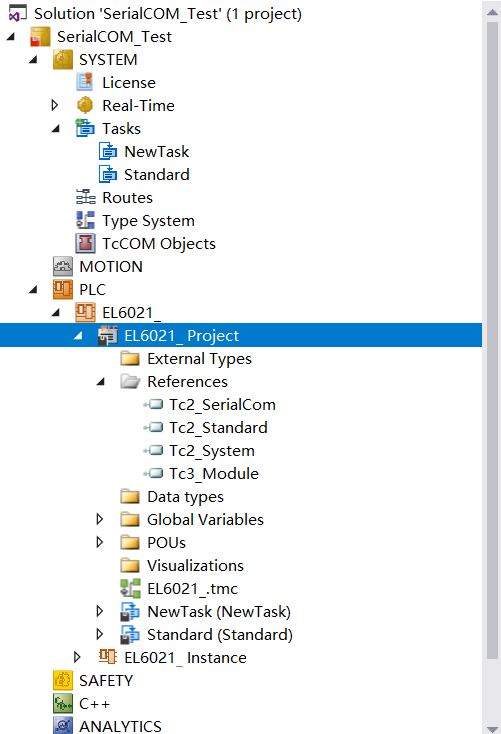
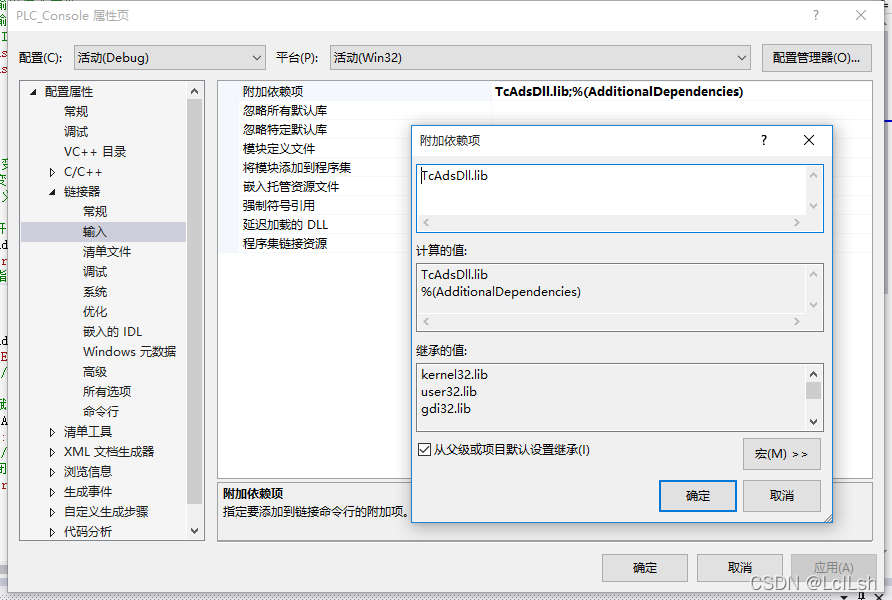
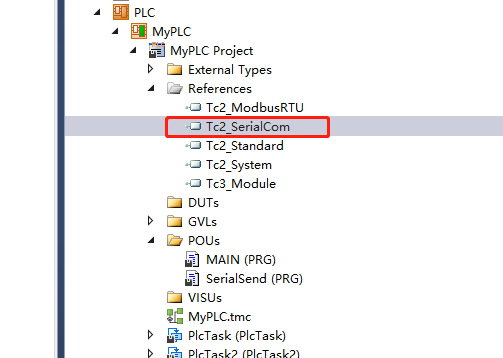
(1)库文件添加
在References中添加Tc2_SerialCom库文件
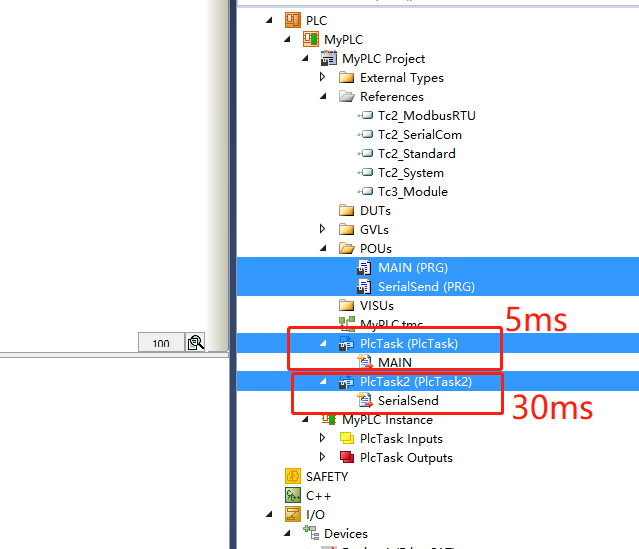
(2)创建任务和程序
添加全局变量
VAR_GLOBAL(**xBuffer 的作用是,在 PLC 要发送的数据和串行通讯的硬件 Process Data 之间设置一个缓存区。*比如 KL6outData22B 类型的接口,每个 PLC 周期只能发送 22 字节。假如程序需要发送的数据为 100 个,*那么实际上 PLC 程序是把这些数据放到 TxBuffer 中,再由硬件分几个 PLC 周期发送出去*)TxBuffer_PC: ComBuffer; RxBuffer_PC: ComBuffer;COMin AT%I* :KL6inData22B; COMout AT%Q* :KL6outData22B;COMportControl :SerialLineControl;
END_VAR在Main程序中添加代码
(**功能块的作用,把 TxBuffer 缓存区的数据经过 Process Data 的 ComOut 发送出去,*而把 ComIn 中的数据接收到 RxBuffer。引用这个功能块的程序执行周期越短,*数据交换的效率就越高,所以这段程序应该放在快速任务中作为 Backgroud 代码无条件执行。
*)
COMportControl(Mode:= SERIALLINEMODE_KL6_22B_STANDARD, pComIn:= ADR(COMin), pComOut:= ADR(COMout), SizeComIn:= SIZEOF(COMin), Error=> , ErrorID=> , TxBuffer:= TxBuffer_PC, RxBuffer:= RxBuffer_PC );在SerialSend程序中添加局部变量
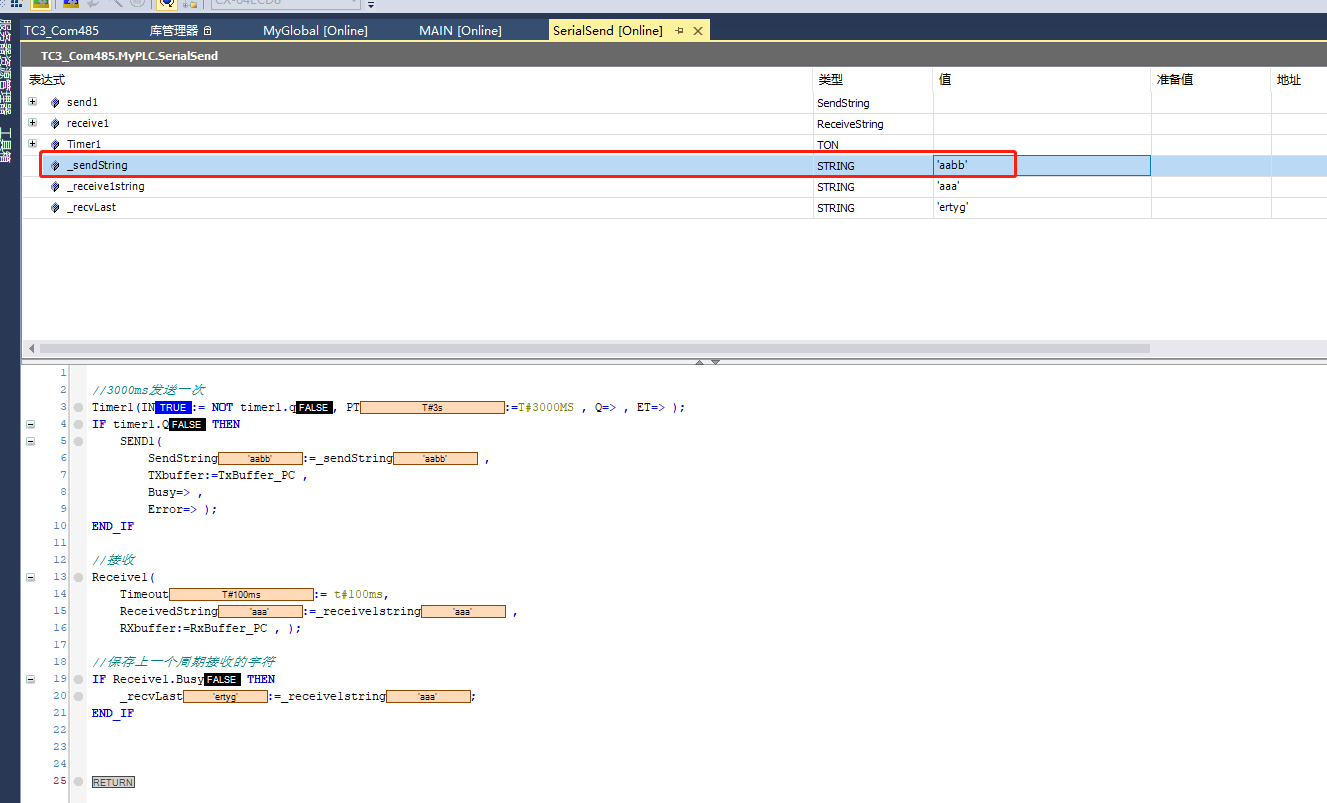
PROGRAM SerialSend
VARsend1: SendString;receive1: ReceiveString;Timer1: TON;_sendString: STRING:='4567';_receive1string: STRING;_recvLast: STRING; //保存上一个周期接收的字符END_VAR在SerialSend程序中添加程序
//3000ms发送一次
Timer1(IN:= NOT timer1.q, PT:=T#3000MS , Q=> , ET=> );
IF timer1.Q THENSEND1(SendString:=_sendString ,TXbuffer:=TxBuffer_PC ,Busy=> ,Error=> );
END_IF//接收
Receive1(Timeout:= t#100ms,ReceivedString:=_receive1string ,RXbuffer:=RxBuffer_PC , );//保存上一个周期接收的字符
IF Receive1.Busy THEN_recvLast:=_receive1string;
END_IF然后,重新编译、生成工程,没有错误、没有警告。
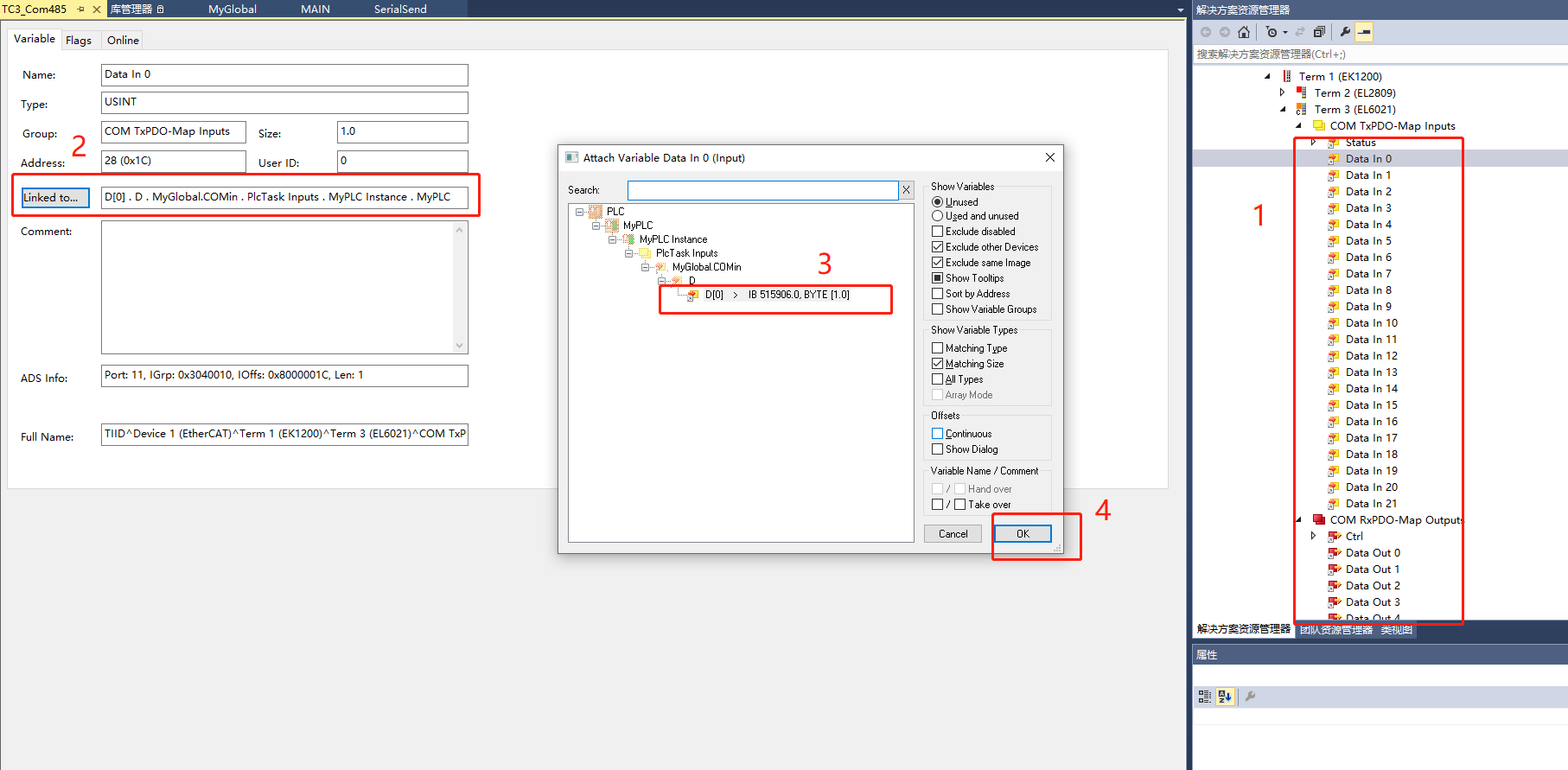
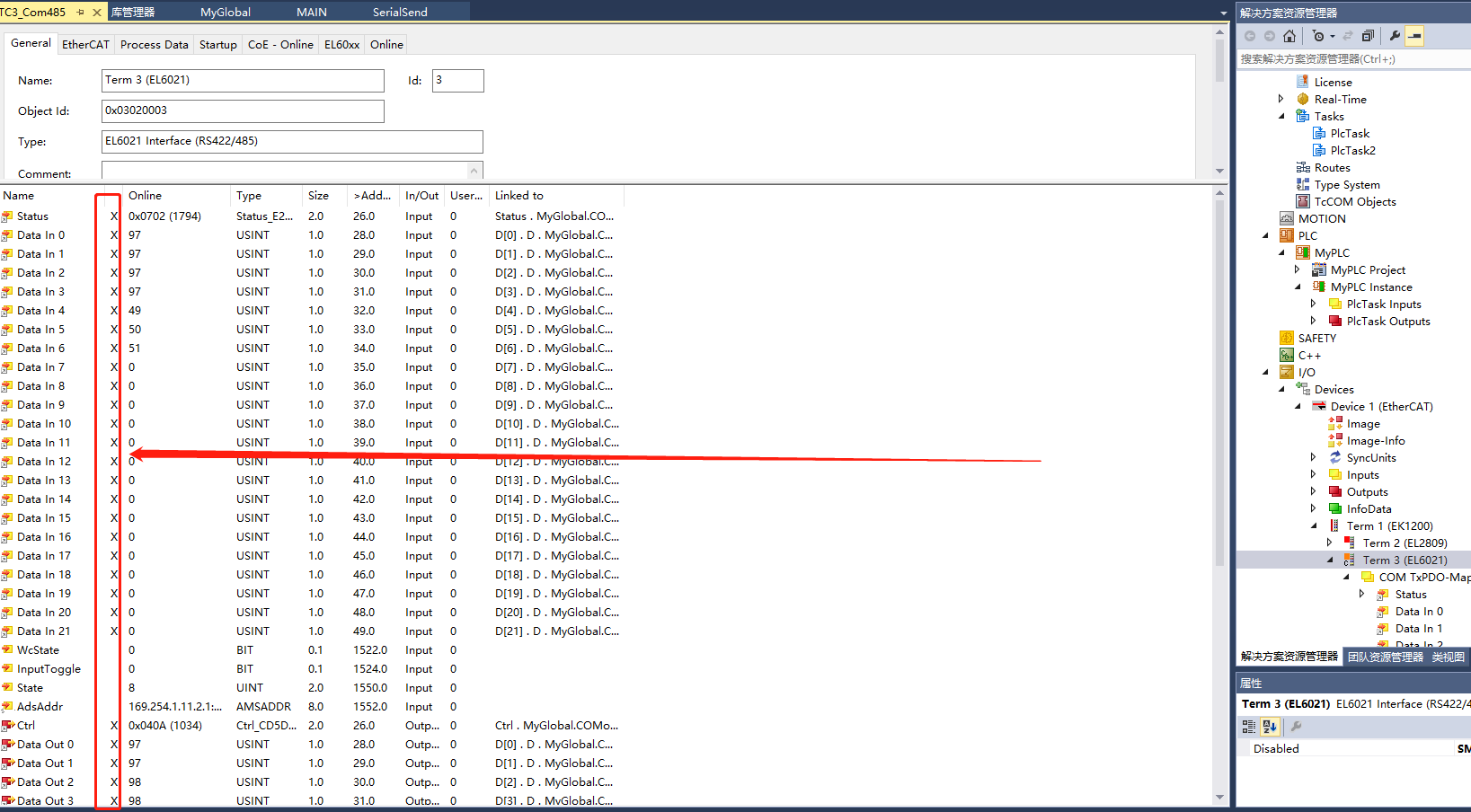
(3)变量关联
EL6021中输入输出的21个IO变量分别和PLC程序中的变量关联起来
(4)重新激活工程、运行
3、运行和测试
(1)运行PLC程序
①程序设置3000ms发送一次
②设置发送的字符串
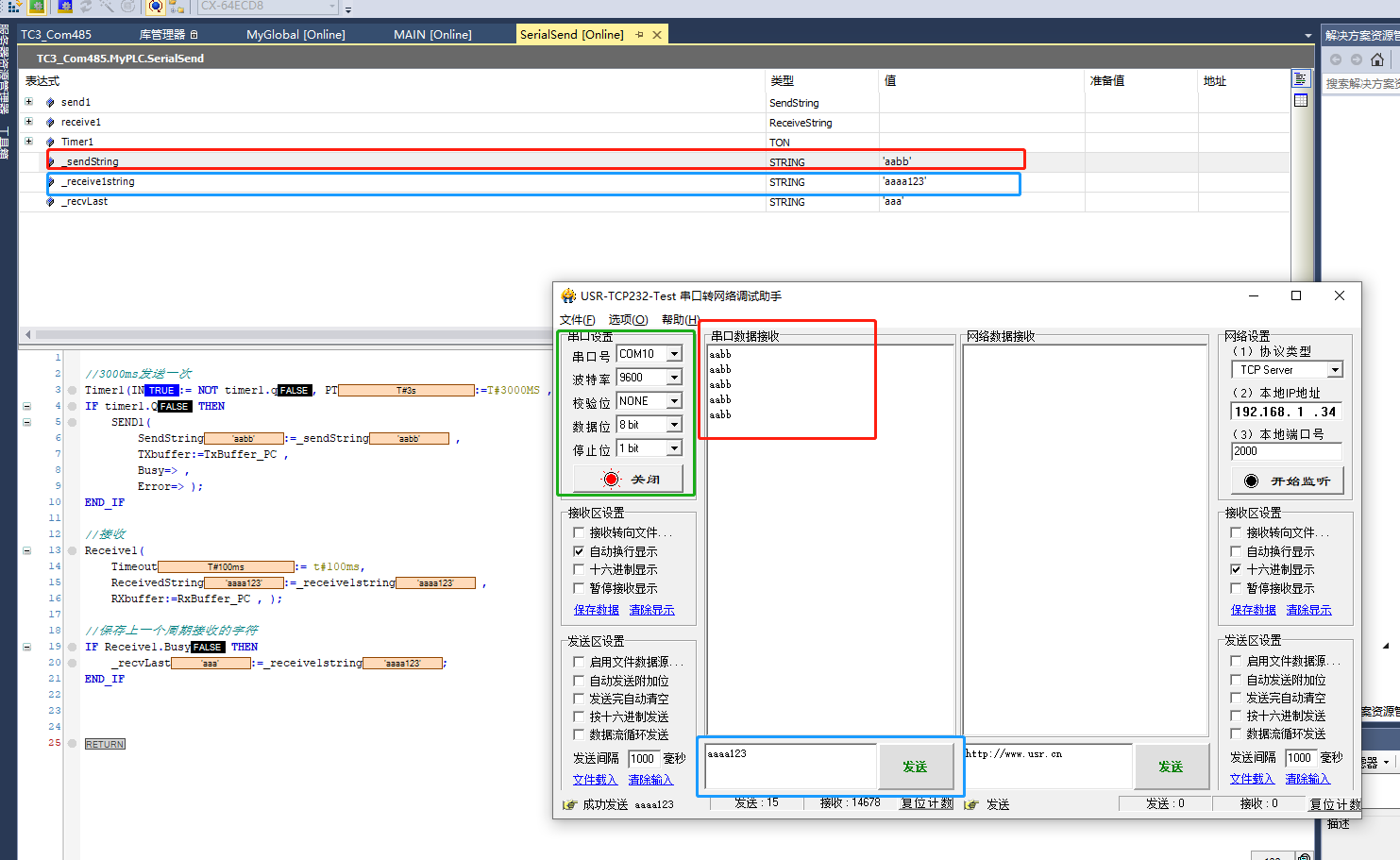
(2)串口调试助手和PLC程序测试
串口参数要和PLC的EL6021配置的串口参数一致。
①打开串口
②串口调试助手接收PLC发送的数据。
③串口调试助手发送数据,在PLC中观测。
五、Byte型数据发送和接收
0、简介
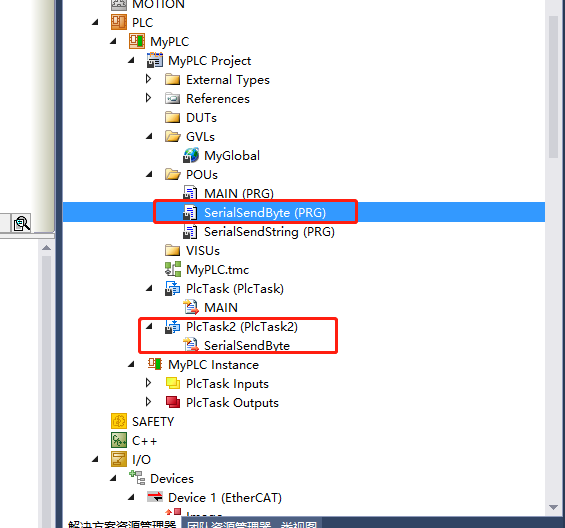
Byte型数据的发送和接收和字符串型数据发送和接收方式一样,都属于串口自由协议通讯方式。因此工程中硬件组态配置是一样的、Main程序中的SerialLineControl功能块使用也一样。本测试程序工程直接复制前面的工程,Task中删除SerialSendString、添加新创建的SerialSendByte程序,如下图所示:
1、变量创建
PROGRAM SerialSendByte
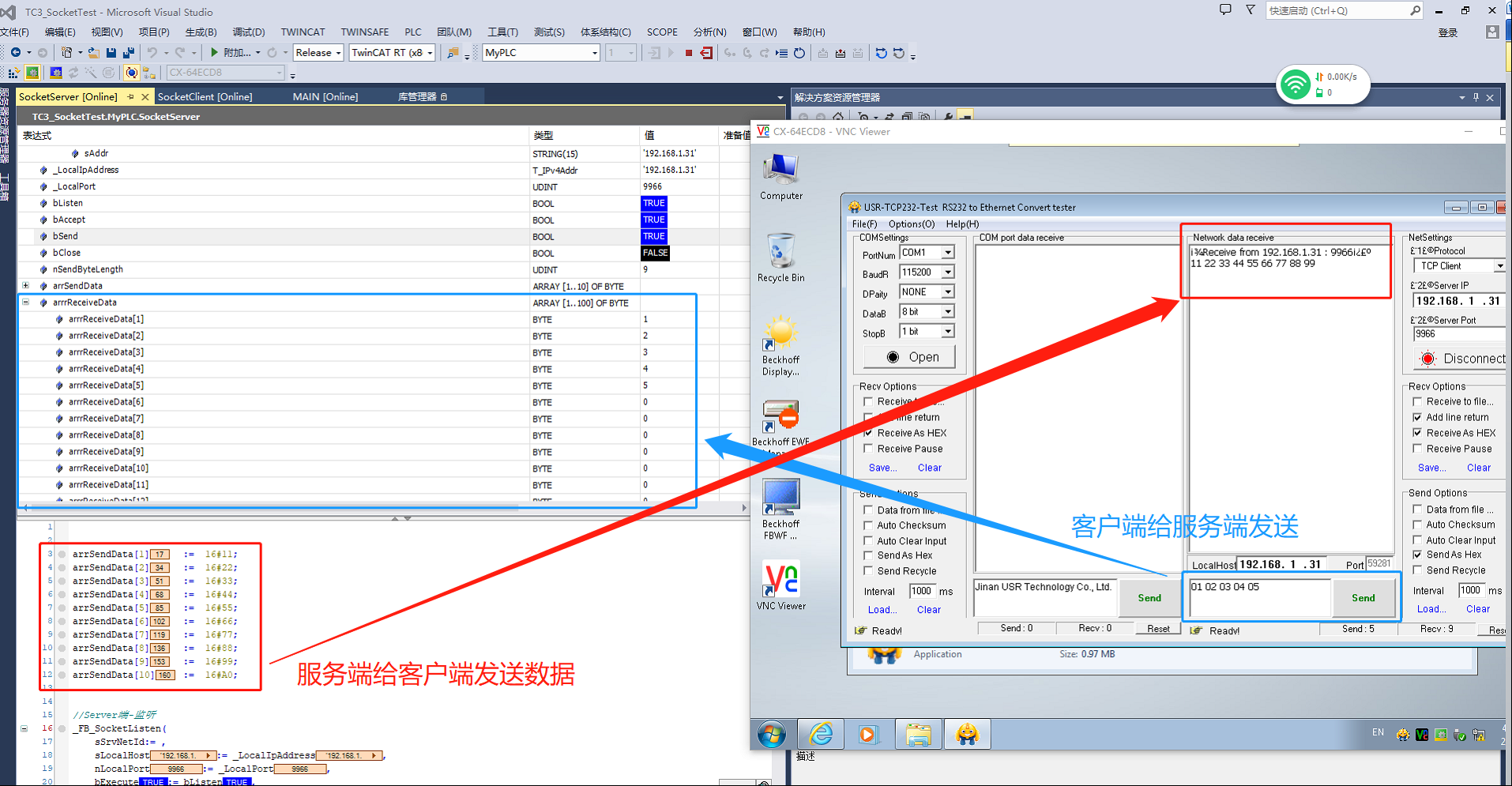
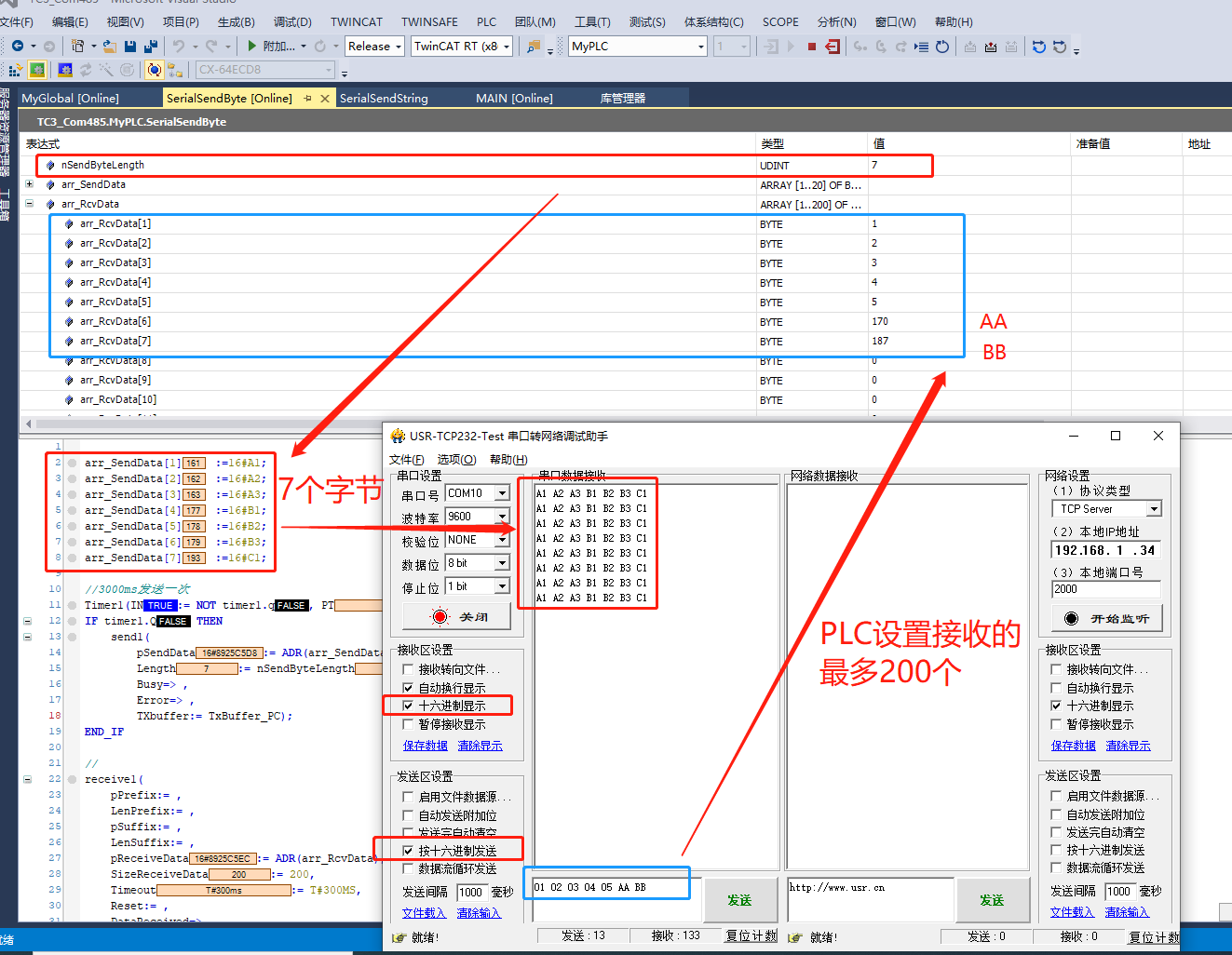
VARsend1: SendData;receive1: ReceiveData;Timer1: TON;nSendByteLength: UDINT:= 5; arr_SendData: ARRAY[1..20] OF BYTE;(*READ*)arr_RcvData: ARRAY[1..200] OF BYTE;END_VAR2、用户程序
arr_SendData[1] :=16#A1;
arr_SendData[2] :=16#A2;
arr_SendData[3] :=16#A3;
arr_SendData[4] :=16#B1;
arr_SendData[5] :=16#B2;
arr_SendData[6] :=16#B3;
arr_SendData[7] :=16#C1;//3000ms发送一次
Timer1(IN:= NOT timer1.q, PT:=T#3000MS , Q=> , ET=> );
IF timer1.Q THENsend1(pSendData:= ADR(arr_SendData), Length:= nSendByteLength, Busy=> , Error=> , TXbuffer:= TxBuffer_PC);
END_IF//
receive1(pPrefix:= , LenPrefix:= , pSuffix:= , LenSuffix:= , pReceiveData:= ADR(arr_RcvData), SizeReceiveData:= 200, Timeout:= T#300MS, Reset:= , DataReceived=> , busy=> , Error=> , RxTimeout=> , LenReceiveData=> , RXbuffer:= RxBuffer_PC); 3、测试
六、测试问题
1、RS485通讯,发送的数据又返回来了
解决:由于 BECKHOFF 提供 RS485 和 RS422 通讯是同一个硬件,所以当用作 RS485 通讯 时, 必须发送和接收短接在一起, 并设置参数为半双工“Half Duplex”,
如果是 EL602x, 参 数 8000: 06 置 True 即为半双工。
2、发送和接收数据都没有
解决:
①检查PLC程序配置是否正确
②PLC程序是否执行
③IO中EL6021的变量是否关联起来了,有X表示关联成功、没有X需要再次关联然后重新激活工程。
七、程序工程下载链接
1、字符串型数据发送和接收程序工程
https://download.csdn.net/download/panjinliang066333/87408302
2、Byte型数据发送和接收程序工程
https://download.csdn.net/download/panjinliang066333/87410022